位姿偏差对X-Y井径测井仪测量精度的影响分析
2021-09-23 13:54路艳齐郭振华焦利明
石油管材与仪器 2021年4期
路艳齐,郭振华,焦利明
(中国电子科技集团公司第二十二研究所 河南 新乡 453003)
0 引 言
井径测量是一种测量油井井眼几何形态的测井方法,井径曲线也是石油标准测井的必测曲线。在测量过程中发现,井径测量值与真实值经常会出现一定误差。龚子华等[1]主要从井径推靠部分设计原理、机械传动间隙、电位器精度等方面分析了井径测量误差,并未考虑仪器轴线与井眼轴线存在的位姿偏差的影响;张道奎[2]主要从井径仪机械结构、电子线路和测量原理等方面对测量误差进行了分析,同样未考虑位姿偏差的影响;吴兴方等[3]考虑了井径仪居中程度,即位移偏差对三臂井径仪测量误差的影响,但并未考虑姿态偏差的影响。
引起井径误差的原因有多种:一种是井径测井仪本身精度不足带来的误差,包含仪器推靠部分的设计误差以及加工、装配误差,采集传感器误差、以及长期使用带来的磨损误差等;一种是测量原理的误差,某些井径测量模型假设测量过程中仪器完全居中,还有一些测量模型则假设仪器轴线与井眼轴线完全重合,这些假设显然是存在一定误差的。
为研究位姿偏差对X-Y井径仪测量精度的影响,改善井径测量精度,本文将建立3个井径数学模型(均不考虑其他因素对井径测量的影响),并通过分析、计算不同模型的误差值及应用条件,择优选取适合工程应用的井径模型。
1 井径模型
模型一:假设仪器在油井内完全居中,即不考虑位姿偏差的影响。
模型二:假设仪器在油井内只有位移偏差,即不考虑姿态偏差的影响。
模型三:仪器在油井中为任意位移和姿态,即同时考虑位姿偏差的影响。
对于模型一与模型二,本文采用平面几何图形分析法建立数学模型进行分析。对于模型三,本文建立空间直角坐标系,采用空间直角坐标变换的方法,建立数学模型进行分析。
1.1 模型一
仪器在油井横截面上的俯视图如图1所示。其中,O为井眼中心,P为仪器中心,O、P重合。A、B、C、D分别为仪器测量臂与油井内壁的接触点。PA、PB、PC、PD分别是仪器4条测量臂在油井横截面上的投影,其长度分别为井眼半径的测量值。

图1 仪器居中时在油井横截面上的俯视图
此模型下,最终的井径测量直径d为仪器4条测量臂测量直径的平均值,即
(1)
1.2 模型二
仪器轴线与井眼轴线平行但不重合,仪器在油井横截面上的俯视图如图2所示。
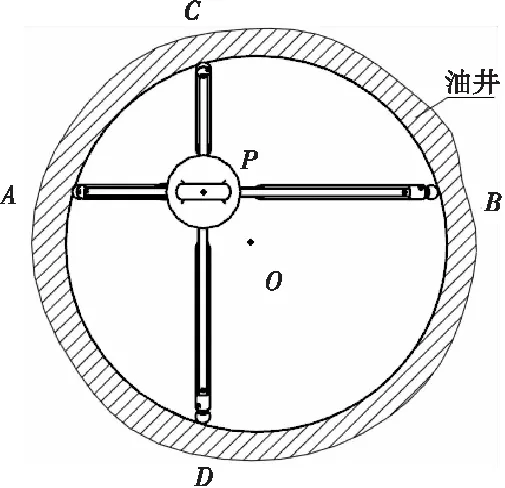
图2 仪器存在位置偏差时在油井横截面上的俯视图
P为仪器中心,O为井眼中心。其几何分析示意图如图3所示,其中PA、PB共线,PC、PD共线,且PA、PB分别与PC、PD垂直。
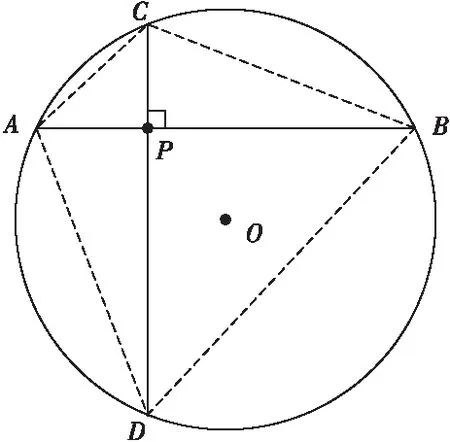
图3 仪器存在位置偏差时的几何分析示意图
由于A、B、C、D都位于油井内壁上,由正弦定理:
(2)
式中:R为井眼半径,mm。
则此模型下,最终的井径测量直径d为:
(3)
其中,根据直角三角形性质:
(4)
(5)
(6)
1.3 模型三
仪器轴线与井眼轴线为任意位姿关系,仪器在油井横截面上的俯视图如图4所示。
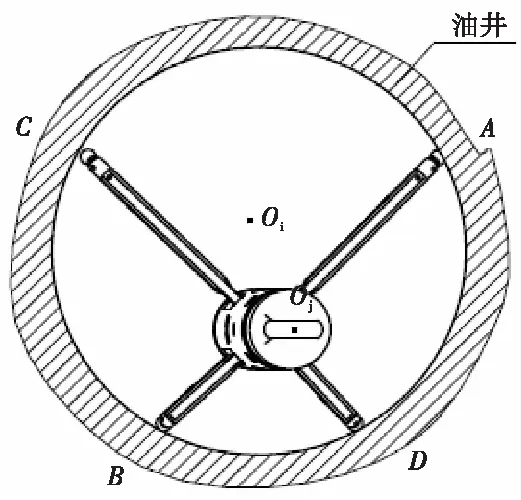
图4 仪器存在位姿偏差时仪器在油井横截面上的俯视图
采用空间直角坐标系,建立仪器坐标系Oj-XjYjZj,坐标系原点Oj在仪器轴线上,Z轴沿仪器轴线,其正方向为沿仪器下接头到上接头的方向;OjA沿X轴正方向,OjB沿X轴负方向,OjC沿Y轴正方向,OjD沿Y轴负方向。
在仪器坐标系中,测量臂与油井内壁的接触点的坐标分别为A(Axj,0,Azj),C(0,Cyj,Czj),B(Bxj,0,Bzj),D(0,Dyj,Dzj)。其中,Axj,Cyj,Bxj,Dyj分别为仪器测量臂的测量值。
采用空间直角坐标系,建立参考坐标系Oi-XiYiZi,坐标系原点Oi在井眼轴线上,Z轴沿井眼轴线,其正方向为沿井眼轴线由下到上。设仪器坐标系Oj-XjYjZj由参考坐标系经过下列变换生成[4-5]:1)绕Xi轴旋转α度;2)绕Yi轴旋转β度;3)沿Xi轴平移Δx;4)沿Yi轴平移Δy。
设空间上的一点在仪器坐标系中的坐标为(xj,yj,zj),在参考坐标系中的对应坐标为(xi,yi,zi)。则由坐标变换可知:
(8)
其中:
Tij(α,β,Δx,Δy)=Trans(yi,Δy)×Trans(xi,Δx)
×Rot(yi,β)×Rot(xi,α)
(9)
(10)
(11)
(12)
(13)
在参考坐标系中,仪器测量臂与油井内壁接触点的对应坐标分别为A(Axi,Ayi,Azi),C(Cxi,Cyi,Czi),B(Bxi,Byi,Bzi),D(Dxi,Dyi,Dzi)。
(14)
(15)
(16)
(17)
在参考坐标系中,A、C、B、D均在方程为x2+y2=R2的圆柱面上,其中R为井眼半径,则:
Axi2+Ayi2=RA2
(18)
Cxi2+Cyi2=RC2
(19)
Bxi2+Byi2=RB2
(20)
Dxi2+Dyi2=RD2
(21)
式中:RA,RB,RC,RD分别为测得的井眼半径,mm。
联立方程(8)~(21),可分别求得RA,RB,RC,RD。此模型下最终的的井径测量直径d为:
(22)
1.4 特殊情况下的井径值判定
若仪器的4条测量臂在同一时刻均与井壁接触,则如上文所述,井径值为4条测量臂测量直径的平均值。
当井眼直径较大或者仪器偏心量较大时,可能导致1条或多条测量臂不能可靠地接触井壁[6]。若只有1条测量臂接触不到井壁,可按上文所述,井径值由其余3条测量臂确定。若有2条以上测量臂接触不到井壁,则测量无效,此时应及时判断问题并找出原因。
2 模型误差验算
采用模型三获取井眼测量直径时,必须已知仪器的位姿偏差值。但模型三不存在原理性误差,故下文将其作为基准,分析验算其他两种模型的误差。
假设已知仪器轴线与井眼轴线的位姿偏差,同时知道井眼直径。将已知条件带入模型三,可以反求出仪器4条测量臂测量值。将得到的测量值分别代入模型一、模型二,求得相应的直径后,与已知直径比较,即可求得模型一和模型二的误差。
以中国电子科技集团公司第二十二研究所独立研发设计的SDZ-5120四臂井径微球微电极短节为例,分析2种模型的误差。SDZ-5120的主体直径为100 mm,有效长度为2 735 mm。设待测井眼直径为300 mm,该仪器在进行井径测量时,最大姿态偏差角不大于4°,最大位置偏差量不超过40 mm。故α、β按-4°、-2°、0°、2°、4°各取5组,Δx,Δy按-40、-20、0、20、40 mm各取5组。
对于4个输入变量α,β,Δx,Δy,若按全因素全水平进行试验,需要进行625次。为减小试验次数,同时保证试验的有效性,按照正交试验法来设计试验,如表1所示。绘制模型一和模型二的测量井径误差图,如图5所示。

表1 不同位姿偏差下模型一和模型二的测量井径
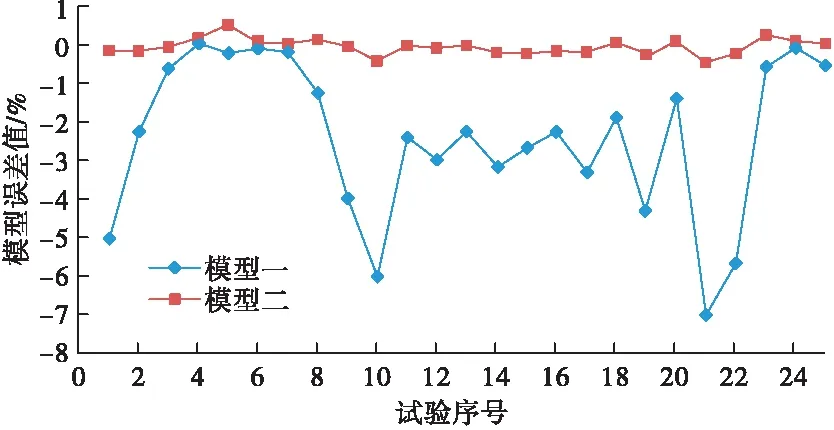
图5 不同位姿偏差下模型一和模型二测量误差曲线
由图5可知,模型一的误差均为负偏差,最大测量偏差为-7.03%,平均偏差为-2.39%;由于考虑了位移偏差的影响,模型二误差值较小,最大偏差值为-0.45%。
3 结 论
本文通过建立3个井径数学模型,研究、分析了位姿偏差对X-Y井径仪井径测量的影响。之后,通过不包含原理性误差的模型三,定量分析验算了模型一和模型二的误差。验算结果表明,由于考虑了位移偏差的影响,模型二的误差要小于模型一的误差。
模型三虽然不存在原理性误差,但应用此模型进行井径测量时,需已知仪器在井眼中的位姿偏差,而位姿偏差一般难以获得。采用模型二进行井径测量时不需要额外的输入参数,且测量误差小,能够满足工程应用的要求,故建议将模型二作为井径测量模型。
猜你喜欢
哈尔滨轴承(2022年1期)2022-05-23
承德石油高等专科学校学报(2022年2期)2022-05-18
北京测绘(2021年7期)2021-07-28
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
石油钻探技术(2020年4期)2020-10-09
现代信息科技(2020年22期)2020-06-24
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
石油钻探技术(2020年4期)2020-01-08
电子技术与软件工程(2019年6期)2019-04-26