
不同行驶系统对战车稳定性的影响研究
2021-09-23 13:37:28单春来赵凯孟超周发明王在森
火炮发射与控制学报 2021年3期
单春来,赵凯,孟超,周发明,王在森
(西北机电工程研究所, 陕西 咸阳 712099)
传统战车通常采用轮式底盘和履带式底盘两种行驶系统。在各类战车的设计研制过程中,人们逐渐认识到这两种不同类型底盘的优缺点:轮式底盘机动速度快、质量轻、能耗低、维护少、噪声小,但在泥泞、崎岖等非结构路面上越障能力差,通过性不高;履带式底盘与地面的接触面积大,附着力大,有利于其爬坡越壕,具有较高的通过性,在复杂道路条件下能发挥较大的优势,但行驶速度较低、机动性差,重型履带式车辆还会对普通地面造成严重破坏[1]。为改善各自的问题,轮履复合结构等新型行驶系统已被广泛研究并使用,但由于仍存在可靠性不佳等问题,目前大量装备和研制中的战车仍以轮式和履带式为主[2]。
在动力学方面,两类底盘都已开展了很多相关研究。如在履带式底盘方面,汪国胜等[3]对某型坦克野外振动试验进行了研究,得到了底盘线性振动引起射击精度下降的原因主要是乘员乘坐位置线性振动较大,影响了乘员操作的结论;马星国等[4]对履带系统的各部分列出平衡方程,得到了各部分的张紧力和地面对负重轮的法向力的计算公式,并与使用Recurdyn计算得到的仿真结果进行了对比验证。在轮式底盘方面,麻小明等[5]利用谐波叠加法模拟各级路面,采用虚拟样机技术建立动力学模型,研究了战车在不同等级路面上以不同速度行驶时的车身稳定性;刘昕运等[6]考虑了土壤的弹塑性、承压特性、剪切特性和轮胎变形等因素,进行了基于火炮刚柔耦合模型的行驶与射击动力学分析计算。关于各类底盘的研究还有很多,在此不再详述。
虽然以履带式底盘和轮式底盘为对象开展了很多研究,在装备研制和使用的过程中,设计者和使用者也对两类底盘的特性具有经验上和感官上的认识,但少有研究能够基于完全相同的上装和车身主体,仅使用不同类型的行驶系统,进行整车设计并对其特性进行对比分析,得到不同行驶系统所带来的影响结果。某中型无人战车研制项目在初期总体方案设计时,基于相同的上装和车身主体,进行了履带式底盘和6×6、8×8两种轮式底盘的选型论证。笔者以该工程项目为依托,从发射动力学和行驶动力学的角度,分析计算了3种不同行驶系统的战车在平坦路面上纵向、侧向静止射击和25 km/h速度行进间纵向、侧向射击的射击稳定性,以及C、D、E级3种等级路面上各以10、25和40 km/h的速度行驶时的行驶稳定性。笔者的研究内容及结果为以后的战车底盘选型工作提供了动力学方面的重要参考。
1 动力学模型
采用虚拟样机技术,使用Recurdyn仿真平台作为工具,分别使用该软件的Track(HM)模块和Tire模块构建履带式底盘和轮式底盘的动力学模型并进行稳定性分析。在笔者的研究内容中,稳定性包括了射击稳定性和行驶稳定性两方面内容,其中射击稳定性又包括了静态射击稳定性和行进间射击稳定性两项内容。在进行射击稳定性分析时,采用了理想的平坦无起伏的平面作为路面,使车身的运动状态仅受射击载荷作用的影响,不受来自于地面的外部激励影响;在进行行驶稳定性分析时,根据谐波叠加法的频率表达式,构建不同等级路面,战车在不同路面上以不同的速度行驶。
1.1 研究对象
根据相关要求,对某中型无人战车进行总体设计,经论证,上装的战斗全重为2.62 t,除两侧行驶系统外的车身主体重3.7 t,车体长5 207 mm,车宽1 623 mm。 搭配不同的行驶系统,有使用履带式底盘、8×8轮式底盘、6×6轮式底盘3种设计方案,分别如图1所示,对应的尺寸指标如表1所示。其中,履带式战车以轮架的中点作为轴距测量端点。由于3种设计方案使用了完全相同的上装和车身主体,不同行驶系统的设计布局决定了使用轻量化履带系统的履带式底盘更加低矮,车宽更窄,车长更长。6×6轮式底盘使用的轮胎比8×8轮式底盘使用的轮胎尺寸更大,根据相关标准[7-8],分别选择11R18和12R20型号轮胎,因而6×6轮式底盘的车高更高。根据设计要求,车身俯仰频率为1.3 Hz,分别根据俯仰频率设计匹配悬挂、车轮等力学参数,3种设计方案之间具有可对比性。


表1 不同设计方案的尺寸指标
1.2 战车动力学建模
以Recurdyn仿真平台为工具建立动力学分析模型,仿真分析中采用如下常规假设[9-10]:忽略发动机及传动结构影响,驱动扭矩作用于主动轮或驱动轮;不考虑各部件的间隙及尺寸误差,各约束均为理想约束;研究整体结构的运动特征,不考虑发射过程中由于膛线造成的扭转以及各部件的变形等。
1.2.1 上装动力学模型
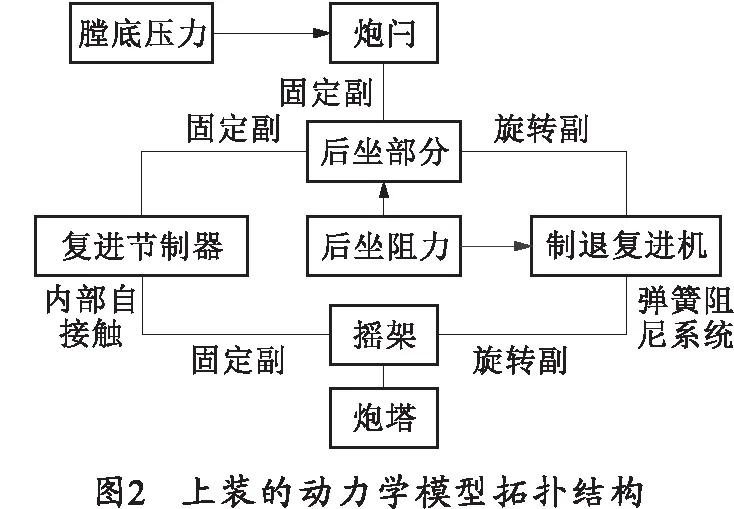
战车的上装系统包括由身管、炮闩、炮尾等组成的后坐部分、制退复进机、复进节制器等组成的反后坐部分、摇架以及炮塔;将膛底压力作用于炮闩上,后坐阻力作为一对共线且反向的力,分别作用于制退复进机和后坐部分。动力学模型的拓扑结构如图2所示。
根据30 mm口径突击炮的内弹道设计,单发射击时,作用于炮闩表面的膛底压力曲线如图3所示。

作用于身管和单侧制退复进机(共两个,斜向45°对称布置)间的后坐阻力曲线如图4所示。进行射击稳定性仿真时,主要考察5连发射击时车身的俯仰角(纵向射击)和侧倾角(侧向射击)的变化情形,射速为300发/min,即5连发射击全过程共用时1 s。

1.2.2 履带式底盘模型
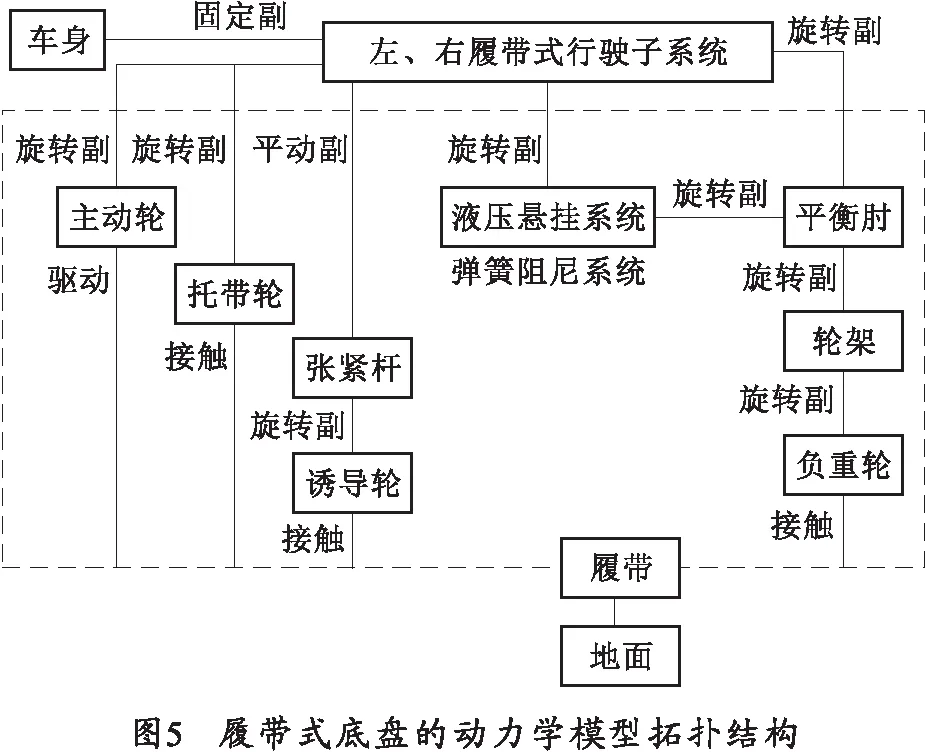
履带式底盘由车身和两侧的履带行驶子系统构成,履带子系统中包括主动轮、托带轮、诱导轮等部件,底盘的动力学模型拓扑结构如图5所示。
1.2.3 轮式底盘模型
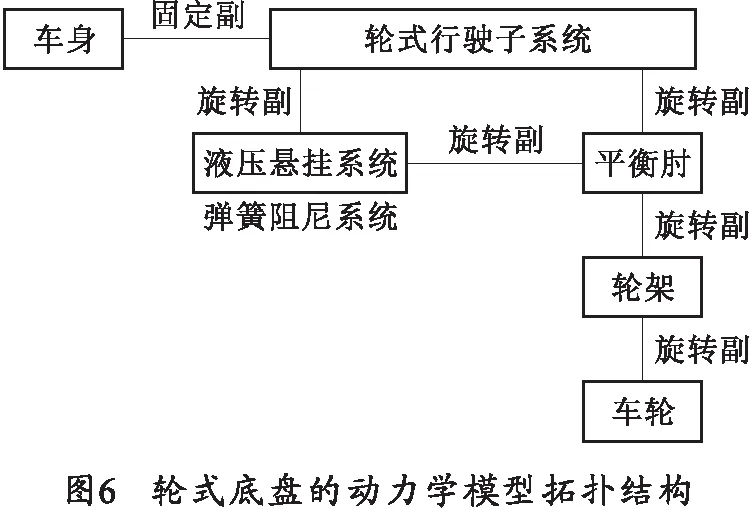
轮式底盘由车身和两侧的轮式行驶子系统构成,6×6轮式底盘和8×8轮式底盘仅悬挂-轮肘的数量和尺寸有所不同,其布置方式大体一致。轮式底盘的动力学模型拓扑结构如图6所示。
1.3 路面不平度建模
根据GB/T 7031—2005[11]规定,路面不平度的功率谱密度为
(1)
式中:Gq(N)为对应空间频率下的路面功率谱密度,也称路面不平度系数;N为空间频率,表示每米长度中包括几个波长;N0为参考空间频率,一般为0.1 m-1;W为频率指数,一般取2。
标准根据路面功率谱密度将路面分为8级不平度,如表2所示。利用Matlab根据公式按照几何平均值构建C、D、E级别路面,路面谱数据如图7所示。将该数据导入到Recurdyn中进行计算。

表2 路面不平度8级分类

2 射击稳定性对比
根据1.2.1节给出的发射载荷,以射击时的车身俯仰角(正向射击)和侧倾角(侧向射击)为考察依据,对3种底盘的战车分别进行平坦无起伏的路面上的纵向、侧向的静止射击和25 km/h速度的行进间射击的射击稳定性计算并进行对比分析。仿真中战车均在完全静止或平稳行驶的状态下进行射击,仿真结果曲线以射击时刻作为0时刻点。
2.1 静态射击稳定性
在平坦无起伏路面上进行5连发射击时的车身稳定性仿真结果如图8所示。从图8(a)中可以看出,进行正向射击时,在后坐力的作用下,履带式战车上仰角度最小,最大上仰角约为0.137°,而两种轮式战车的最大上仰角均超过了0.200°。在5连发射击结束后,履带式战车在悬挂反弹和车体惯性的作用下,车体反向俯角达到了-0.055°,而轮式战车的反向俯角不超过-0.002°。由于履带式战车的悬挂阻尼较大,车身虽然在射击后2 s内就已平稳(即不再反复做俯仰动作),但用了3.2 s的时长才完全恢复到静止位置,而两种轮式战车均在射击后的1.5 s左右就恢复到静止状态。由于战车使用了同一车体且俯仰频率一致,依照俯仰频率匹配悬挂特性,8×8轮式战车每组悬挂的簧上质量更小,则悬挂刚度更小,且车身重心位置均在车体中心附近,因此其车身俯仰角反而要略大于6×6轮式战车。从图8(b)中可以看出,进行侧向射击时,履带式战车的侧向射击最大侧倾仰角为0.176°,最大侧倾俯角为-0.037°,两种轮式战车分别超过了0.500°和-0.125°,而在更多的悬挂系统支撑下, 8×8轮式战车的侧倾角比6×6轮式战车更小。履带式战车在侧向射击后1.5 s左右即可恢复静止,轮式战车则需要2.5 s才能恢复静止。

2.2 行进间射击稳定性
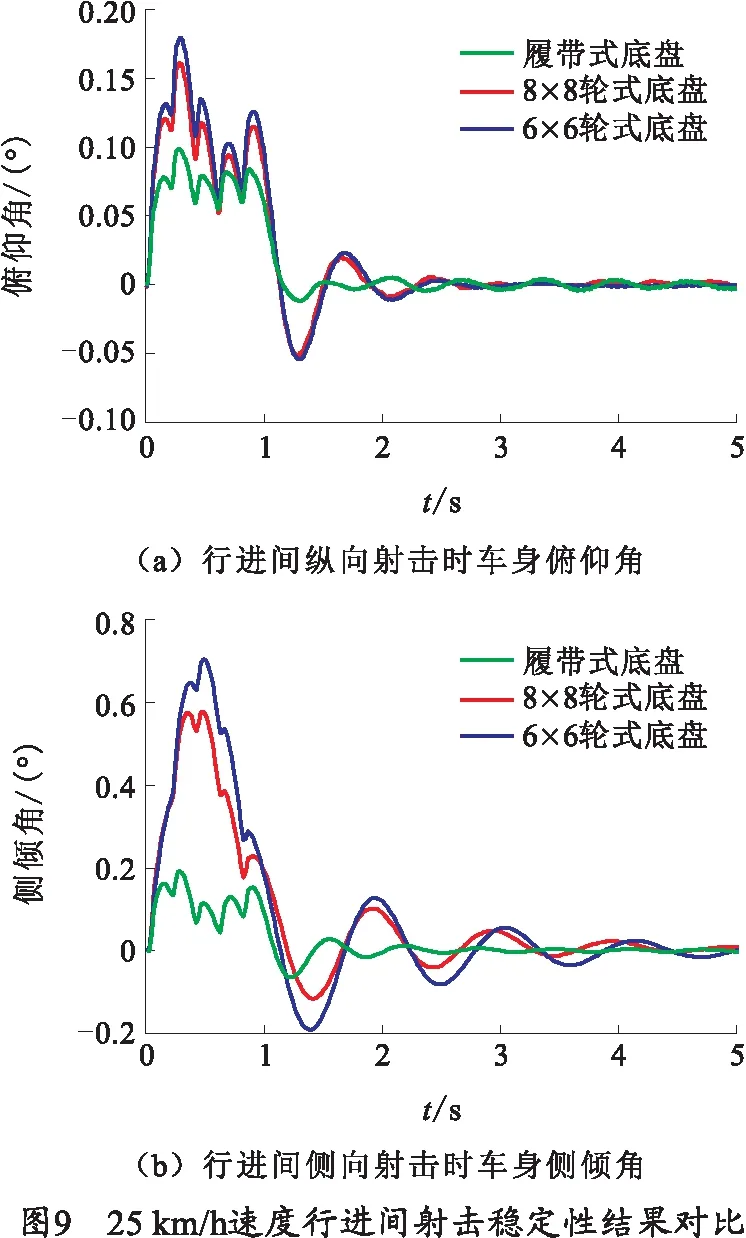
在平坦无起伏路面上进行25 km/h速度行驶的行进间5连发射击,车身稳定性仿真结果如图9所示。从图9(a)中可以看出,进行正向射击时,履带式战车的俯仰角均明显小于轮式战车,仰角和俯角分别为0.962°和-0.012°。两种轮式战车的俯仰角几乎一致,但由于行驶过程中,战车在后坐作用下进行俯仰动作时,还会由车轮转矩抵消一部分后坐力传递的能量,因此8×8轮式战车的俯仰角略小于6×6轮式战车。8×8轮式战车的仰角和俯角分别为0.162°和-0.050°,6×6轮式战车的仰角和俯角分别为0.175°和-0.051°。3种战车均在射击后的2 s内恢复到平稳行驶状态,但由于车身固有振动特性等原因,平稳行驶阶段的车身俯仰角曲线并非完全平直的直线,而是等周期、微小幅值、无衰减的正弦曲线,曲线的振幅关系为:履带式战车>8×8轮式战车>6×6轮式战车。
侧向射击时,上述趋势表现得更加明显:履带式战车的最大侧倾角分别为0.171°和-0.082°;8×8轮式战车最大侧倾角分别为0.579°和-0.128°;6×6轮式战车最大侧倾角分别为0.687°和-0.181°。履带式战车能够在射击后1.5 s内恢复到平稳行驶状态,而两型轮式底盘均需要超过5 s的时间。
3 行驶稳定性
除了进行平坦路面上的射击稳定性分析外,对非平坦路面上的行进间射击也进行了仿真分析。仿真结果表明,对于C级以上路面、10 km/h以上的行驶速度而言,施加射击载荷后,在车身俯仰角或侧倾角曲线上看不到明显由发射载荷作用产生的车体动作。因此,非平坦路面上的射击稳定性分析不作为本文的研究内容。以C、D、E级3种不同级别的起伏路面,10、25、40 km/h的速度行驶120 m距离的车身俯仰角作为考察指标,分析3种战车的行驶稳定性。
战车在C级路面上以不同速度行驶时的车身稳定性结果对比如图10所示。

对图10进行对比,结合仿真结果进行分析,可以得到以下结论:
1)非平坦路面的起伏相当于对履带或车轮施加外部激励,战车行驶的速度越快,激励的频率越高,且行驶相同距离所花费的时间越少,车身俯仰角关于行驶距离的曲线就显得越光滑。
2)履带式战车的行驶稳定性与轮式战车的行驶稳定性差别较大,而两种轮式战车的行驶稳定性差别不大。
3)随着速度的增加,履带式战车的车身俯仰角幅值逐渐减小,而轮式战车的车身俯仰角幅值在逐渐增大。
4)以10 km/h速度行驶时,履带式战车的车身俯仰角最大;以25 km/h速度行驶时,履带式战车的车身俯仰角与轮式战车几乎相同;以40 km/h速度行驶时,履带式战车的车身俯仰角明显小于轮式战车。
同样对D、E级路面上以不同速度行驶时的车身稳定性进行对比分析,结果如图11、12所示。

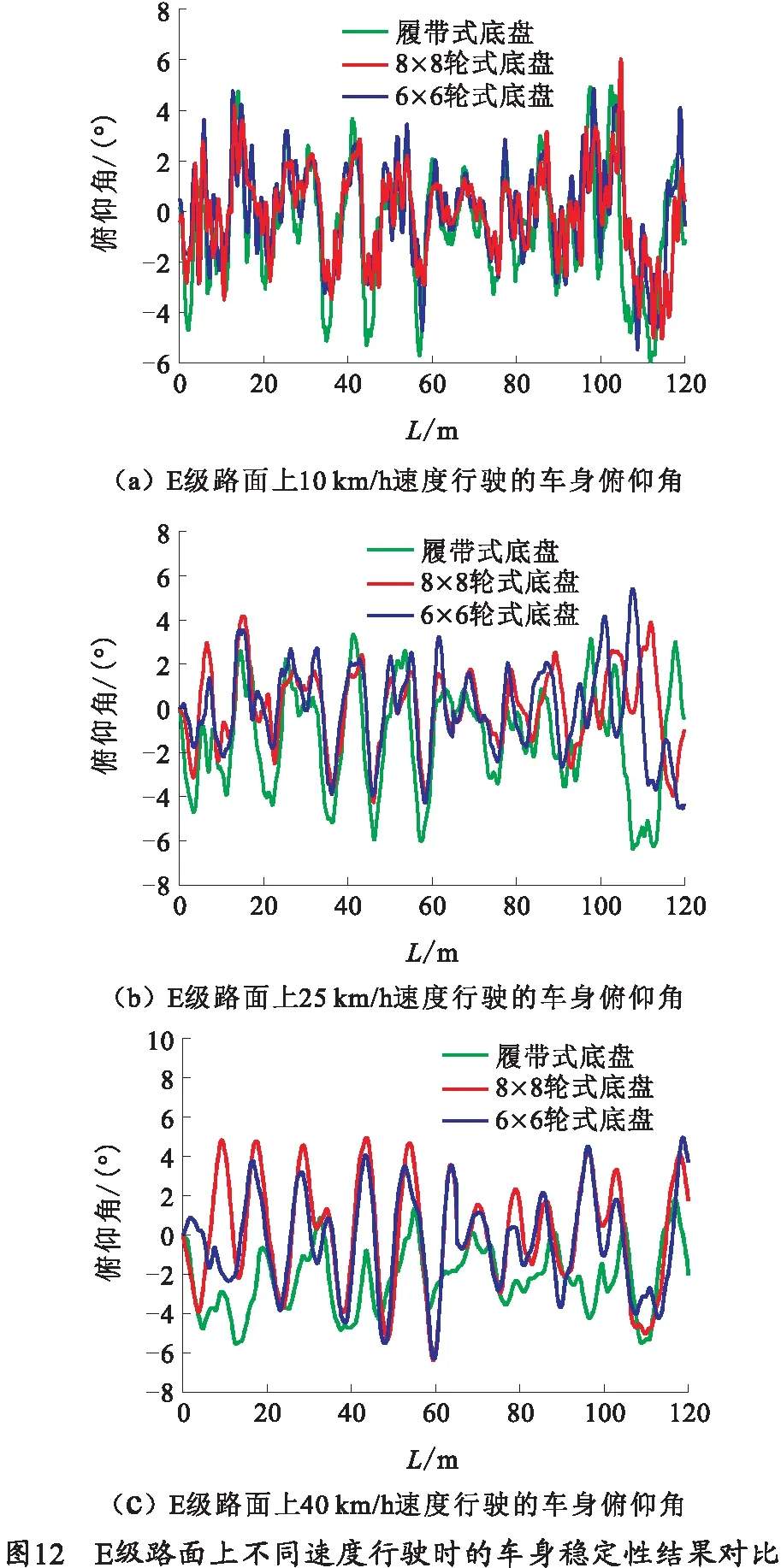
由于路面起伏程度更大,车身俯仰角曲线的幅值也相应增大,但仍满足上述规律,且其表现的特征更加明显。另外,在D、E级路面上,战车以10、25 km/h的速度行驶时,两种轮式战车的行驶稳定性没有明显区别,但以40 km/h行驶时,8×8轮式战车的最大俯仰角最大,即行驶稳定性略差于6×6轮式战车。该趋势在路面相对平缓的C级路面上反应的不是特别明显。
4 结论
笔者以某中型无人战车初期方案设计的底盘选型工作为研究背景,在上装和底盘主体完全一致的设计下,通过选用履带、6×6轮式、8×8轮式3种不同行驶系统的设计方案进行动力学仿真分析,研究了不同行驶系统对战车的静态射击稳定性、行进间射击稳定性和行驶稳定性的影响。研究表明:
1)在车身俯仰、侧倾频率一致的前提下,匹配悬挂刚度、阻尼等动力学参数后,履带式战车的射击稳定性明显优于轮式战车。
2)在不同等级路面上行驶时,路面状况越差,战车的俯仰角度变化越大;同一路面下,以较低速度行驶时,履带式底盘的行驶稳定性差于轮式底盘;以中等速度行驶时,履带式底盘的行驶稳定性与轮式底盘的行驶稳定性相当;以较高速度行驶时,履带式底盘的行驶稳定性明显优于轮式底盘。
3)采用6×6轮式底盘和8×8轮式底盘对射击稳定性和行驶稳定性的影响差异不大。
综合以上结论可知,履带式战车仅在低速下的行驶稳定性略差,且与轮式战车的差距并不明显,而射击稳定性和高速行驶稳定性都明显优于轮式战车,因此,在不考虑制造成本、可靠性和可维修性、长途运输等因素的前提下,履带式底盘在稳定性方面更有优势。通过以上研究,为战车前期设计时对底盘行驶系统的选型提供了动力学方面的参考。
猜你喜欢
军事文摘(2022年17期)2022-09-24 01:10:54
小哥白尼(军事科学)(2022年4期)2022-07-08 07:03:34
军民两用技术与产品(2021年10期)2021-03-16 06:05:36
小哥白尼(军事科学)(2020年7期)2020-05-22 06:24:44
经济技术协作信息(2018年7期)2019-01-14 03:05:40
中国军转民(2018年1期)2018-06-08 05:52:57
军营文化天地(2017年11期)2017-12-08 08:20:34
学习月刊(2016年19期)2016-07-11 01:59:38
专用汽车(2016年4期)2016-03-01 04:14:20
汽车维修与保养(2015年6期)2015-04-17 03:31:48
