
酒店机器人服务失败责任归因研究:失败类型与心灵感知的影响
2021-09-23 17:38:16侯如靖
旅游科学 2021年4期
侯如靖
(天津职业技术师范大学经济与管理学院,天津 300222)
0 引言
伴随智能技术的发展与应用,酒店业开始推行智能化服务。2013 年,美国Yotel 酒店使用机器人取代礼宾员;2015 年,日本Henn-na 酒店在清理房间、搬运行李与接待迎宾上都配备了机器人①闻旅.当机器人服务渐成标配,智慧酒店是走向跨越还是步入歧途[EB/OL].https://www.bjnews.com.cn/detail/160367730531602.html.。酒店机器人不仅能提高服务效率降低成本,而且还能增加对年轻顾客的吸引力,给顾客带来更好的服务体验。近年来,国内酒店业积极进行智能化转型,逐步采用机器人等智能服务设备。新冠疫情要求无接触服务,更使得众多酒店将服务机器人视为重要的“工作人员”。以华住酒店集团为例,配送机器人平均每月送物20余万次①搜狐网.华住、首旅如家发力“机器人+酒店”,但这门生意还不好做[EB/OL].https://www.sohu.com/a/415092966_467197.。不过,酒店机器人在服务中难免会出现问题。比如,迎宾机器人不能回答顾客的提问,搬运机器人无法穿越斜坡,配送机器人送达的物品出错等。那么,酒店顾客会将责任归因于机器人吗?
在现有文献中,研究者们发现酒店机器人会带来服务失败(Qiu et al.,2019),并提出顾客可能会通过一些语言和行为向机器人抱怨服务失败(Belanche et al.,2020),管理者要具备解决机器人服务失败问题的能力(Xu et al.,2020)。根据责任归因理论,Leo等(2020)对比分析机器人和员工造成的服务失败,发现顾客会将失败责任更多地归因于员工而非机器人,这是因为机器人对服务失败的控制力更差。这项研究的不足在于:将机器人与人做对比,研究结论过于直观,没有专门讨论机器人服务失败;只考虑到结果失败,没有关注过程失败。从酒店实践看,一方面,机器人的拟人化程度不同,导致顾客对机器人的心灵感知程度不同;另一方面,机器人替代了部分员工的工作,顾客在接受机器人提供的服务时,可能会出现结果失败或过程失败。这些都会影响顾客对服务失败的责任归因。
基于此,本文关注顾客对酒店机器人服务失败的责任归因,以配送机器人服务失败为具体的实验情境,探讨服务失败类型(过程失败vs.结果失败)与顾客对机器人责任归因的关系,并检验可控性感知的中介作用与心灵感知的调节作用。在理论上,揭示顾客对酒店机器人服务失败责任归因的心理机制与边界,有助于完善机器人服务失败相关研究的不足。在实践上,从服务失败类型与顾客心灵感知两个方面为酒店处理机器人服务失败问题提供参考。
1 文献回顾与研究假设
1.1 酒店机器人与相关研究
机器人是一种智能化的机械装置,能半自主或全自主工作。机器人分为两大类:工业机器人和服务机器人。工业机器人通常被配备在生产制造的各个环节,而服务机器人则是在动态变化的环境中执行任务(Zielinski et al.,2010)。服务机器人是信息技术的物质化体现,它能通过高度自主性的有形或无形工作,向顾客提供定制化服务(Jöerling et al.,2019)。服务机器人的核心特征在于自主性,这是区别于其他服务技术的关键要素(Park,2020;Tung et al.,2018)。例如,自助服务设备只能对人们的输入做出回应,但不能依据产品或服务环境来计划自己的行为(Lu et al.,2019)。服务机器人借助传感器等技术工具,能够拥有像人类一样的听觉、视觉和触觉,进而理解环境、做出决策、与人互动。酒店机器人是一种应用于酒店场景中的服务机器人,包括迎宾机器人、接待机器人、配送机器人等。
关于酒店机器人的研究,主要从以下几个方面展开:第一,顾客对酒店机器人的使用意愿。例如,Shin等(2020)发现顾客虽然喜欢迎宾机器人,但会选择酒店员工而非机器人为自己服务,因为与员工的互动相比机器人更加真实。第二,酒店员工对酒店机器人的看法。有研究指出,机器人这个词会诱发酒店员工的消极情绪,员工相信机器人会给他们和酒店带来好处,但也相信机器人在与顾客交流时会存在问题,还预测机器人在未来会导致失业率上升(Vatan et al.,2021)。第三,机器人给酒店管理带来的变革。依据Xu等(2020)的观点,机器人会提高酒店活动的效率与效果,但也会给酒店文化和组织结构等带来挑战,因而未来的酒店要具备管理机器人与员工的能力。第四,顾客对酒店机器人服务的评价。这部分文献比较丰富,基本观点是酒店机器人还无法拥有人的情感,顾客对其提供的服务在情感维度上评价低(Fuentes-Moraleda et al.,2020)。例如,Chan等(2019)发现,服务机器人会给顾客带来更高的感官和智力体验及更低的情感体验,服务机器人会提高顾客对中低档酒店的评级但不会影响高档酒店评级。Choi等(2019)指出顾客与机器人交流时,更喜欢常规语言而非修辞语言,这是因为他们觉得机器人缺少情感,使用常规语言会更加可靠。
总体上看,研究者们认为机器人改变了酒店服务管理,并着重讨论了顾客对酒店机器人服务的评价,但针对酒店机器人服务失败的理论研究却相对较少。
1.2 机器人服务失败与归因
虽然在设计机器人时力求做到完美,但是机器人在实际提供服务时难免会出现失败(Wirtz et al.,2018)。在研究机器人服务体验时,Qiu等(2019)选取了酒店和餐厅顾客进行半结构化访谈,发现许多顾客将机器人视为新事物从而产生兴趣。但部分顾客认为机器人会带来服务失败,譬如,由于机器人的语音识别系统很差,导致顾客没有耐心使用机器人的服务。在对服务经理调查与文献梳理归纳的基础上,Belanche 等(2020)提出关于服务机器人的研究议题,其中涉及服务失败的内容包括:顾客会向机器人抱怨服务失败吗?公司应该如何解决机器人服务失败问题?机器人有足够的自主性、灵活性和情感进行服务补救吗?
部分文献对上述议题进行了探索。一类文献是研究顾客对员工和机器人服务失败与补救评价的差异。例如,依据Leo 等(2020)的成果,在对机器人服务失败归因时,可控性是最重要的评判标准,顾客认为机器人对服务失败的控制力弱于员工,所以会将更多责任归因于员工。基于角色一致性理论,Ho 等(2020)发现在服务补救时,顾客会对员工和机器人产生相似的角色感知,因此无论是员工还是机器人实施的补救,顾客对补救满意度的评价并无差异。另一类文献是研究机器人的特征与失败类型在服务失败中的作用。例如,Lv 等(2021)发现语音机器人助手越可爱,顾客对服务失败的容忍度就越高,并将这种效应命名为可爱效应。不过,可爱效应会在失败程度高与时间压力大时失效。Choi等(2020)将机器人服务失败划分为结果失败与过程失败,并指出相对于非人形机器人,类人形机器人带来的过程失败会导致更低的不满,但这种差异在结果失败中并不存在。
依据Smith 等(1999)对服务失败的分类,服务失败包括过程失败和结果失败。前者是指服务传递中存在的缺陷或不足,而后者是指没有实现基本服务内容。在机器人服务场景中,过程失败主要表现为机器人在服务传递中出现的问题,如按键不灵敏;结果失败主要表现为机器人没有满足顾客对服务的基本需求,如送错商品。在服务失败之后,顾客会从控制点、可控性和稳定性3 个方面,对失败该由谁负责进行归因分析(Weiner,1979)。其中,顾客主要从可控性方面对机器人服务失败进行归因(Leo et al.,2020)。可控性是指失败被服务提供者避免的程度。机器人对服务失败的可控性取决于其能力强弱。酒店机器人借助传感器等技术工具,能够拥有像人类一样的听觉、视觉和触觉,进而理解环境、做出决策、与人互动。因此,酒店机器人在过程服务上拥有很强的能力。不过,机器人的智能水平依然有限,在满足顾客需求上能力较弱,很难精准识别顾客的需求,目前主要依赖人的帮助。以酒店配送机器人为例,机器人通常只承担独立的配送任务,具体配送的物品由员工负责。因此,本文认为相比结果失败,过程失败会使顾客对机器人的可控性感知更高,从而更可能将责任归因于机器人。提出假设如下:
H1:与结果失败相比,过程失败更能引起顾客对机器人的责任归因。H2:可控性感知在服务失败类型与责任归因之间发挥中介作用。
1.3 顾客对机器人的心灵感知评价
心灵感知(mind perception)概念最先由Gray等(2007)提出,其对比分析了人类与非人类的心理能力,构建并验证了心灵感知包括两个相互独立的维度,即代理(agency)和经验(experience)。前者指行动、计划和自我控制的能力,后者指感受痛苦、快乐等情感的能力。人类在代理和经验上的表现都很好,但机器人在代理上表现差,在经验上表现更差。另外,个体会从代理和经验两方面评价机器人的心灵感知水平。因此,机器人的社交行为及个体对机器人的先前知识是影响个体对机器人心灵感知评价的关键因素(Wallkötter et al.,2020)。不过,如果机器人具有过高的做事和情感能力,那么就会给人类带来威胁。例如,“恐怖谷”理论指出拟人化起初会改善人们对机器人的印象,但当达到某个临界点时却会给人带来不安和恐惧(Ho et al.,2010)。当前,酒店机器人拟人化程度有限,并不存在“恐怖谷”问题。
人之所以会对机器人的心灵感知水平做出评价,是因为人会将非人类对象赋予人性或人格化(Chen et al.,2020),并且这种行为是自发的(Epley et al.,2007),也就是所谓的拟人化思维。心理学家认为拟人化是一个认知过程,即个体会使用关于人类的知识来推断非人类对象的不可见特征(Epley et al.,2007)。机器人在外观和行为上越像人,人们将其视为人类的可能性越大,对其心灵感知水平的评价越高(Bartneck et al.,2009)。当个体将机器人视为人类时,会采取近似于与人相处的方式与机器人相处。譬如,相比严肃的机器人,人们会认为调皮的机器人更加开朗和外向。因此,对于服务机器人,企业倾向于采用拟人化设计,即具有与人类相似的外观和行为,甚至思想和情感,目的在于使顾客产生更高的心灵感知评价。换句话说,顾客对机器人的心灵感知水平评价越高,会认为机器人的做事和情感能力越强。
心灵感知会影响责任归因。在Gray 等(2007)的研究中,被试倾向于将责任归因于那些高水平心灵感知者。对于协作任务失败,Hinds等(2004)发现人机协作和人人协作两种情况下的归因及其程度并无差别。此后,Kim 等(2006)只聚焦于人机协作任务,验证任务失败的责任更可能被归因于高自主性机器人而非低自主性机器人。总体上看,对机器人的心灵感知评价决定着对机器人的做事和情感能力评价。当顾客对机器人的心灵感知水平评价高,就意味着他们认为机器人的工作能力强,对服务的控制力高。这时,如果机器人出现服务失败,那么顾客更可能将责任归因于机器人。不过,尽管顾客认为高水平心灵感知机器人对服务过程与结果均有一定的控制力,但对结果的控制力依然会弱于过程,因此,相比结果失败,过程失败会使顾客更多地将责任归因于机器人。相较于高水平心灵感知,顾客认为低水平心灵感知的机器人在服务过程和结果上控制力都很弱,所以无论遭遇过程失败还是结果失败,顾客通常都不会将责任归因于机器人。据此,提出如下假设:
H3:心灵感知会调节可控性感知在服务失败类型与责任归因之间的中介效应。在高心灵感知组,可控性感知的中介效应存在;在低心灵感知组,可控性感知的中介效应不存在。
2 研究设计
2.1 实验设计
本文采用情景模拟法对研究变量进行实验操纵,以酒店机器人服务为场景,执行了2(服务失败类型:过程失败vs.结果失败)×2(心灵感知:高vs.低)的组间实验设计。遵循Smith等(1999)对过程失败和结果失败的界定,对失败类型的实验操纵如表1 所示。心灵感知是心理变量,很难被直接操纵。鉴于拟人化与心灵感知高度正相关,所以通过操纵机器人的拟人化程度,实现对心灵感知的间接操纵。具体做法是,向被试展示为其提供服务的机器人图片。在高心灵感知组,机器人有眼睛、嘴巴和领带;在低心灵感知组,机器人没有上述人类特征。
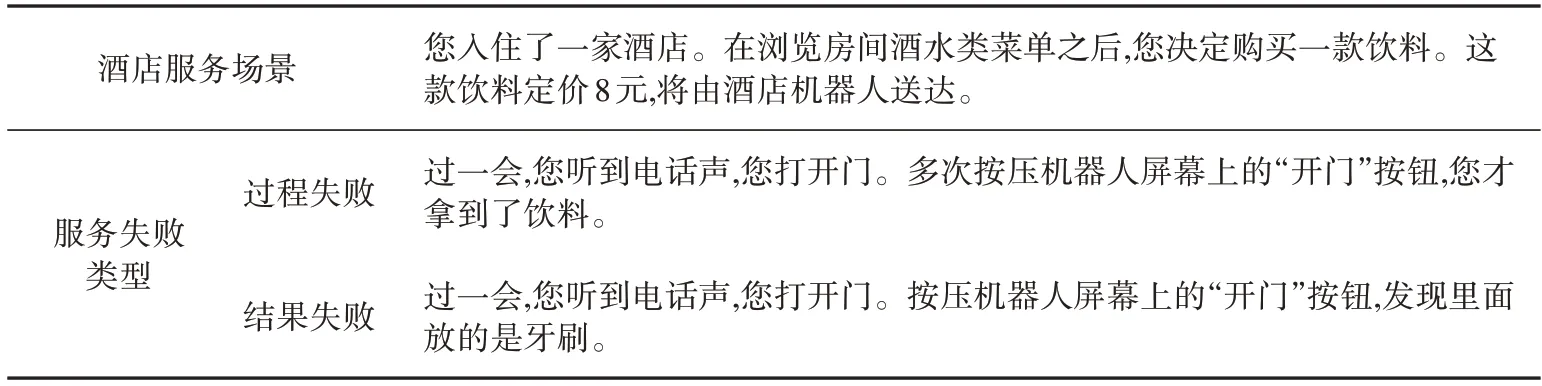
表1 酒店机器人服务失败类型的实验操纵
2.2 变量测量
文中涉及变量的测量问项均来源于文献中的成熟量表,并采用Likert 七级量表进行测评。借鉴Lee等(2020)在研究聊天机器人时使用的量表,本文设计3个问项来测量心灵感知,分别是“这个机器人是有意识的”“这个机器人能够独立思考”“这个机器人具有自我意志”(α=0.933)。借鉴Leo 等(2020)的研究,本文设计两个问项来测量可控性感知,一个问项来测量责任归因。可控性感知的问项是“这次服务失败是可以被机器人控制的”“这次服务失败是可以被机器人避免的”(α=0.862)。责任归因的问项是“对于这次服务失败,您认为机器人应该承担多大的责任?”除此之外,本文还考虑到被试的性别、年龄、职业、学历、月收入,以及对服务机器人的熟悉程度和使用经验等控制变量。
2.3 数据收集
本次数据收集在腾讯问卷平台上完成。操作过程如下:(1)针对4 个实验情境,分别设计4 份在线问卷;(2)使用回答小组服务,将被试限定为非学生,要求男女均等回收;(3)设置回收问卷数量,并支付奖励金2 元/份;(4)通过微信公众号“卷叔填填圈”,向微信用户发放问卷;(5)对回收的问卷进行审核,剔除无效问卷,发放奖励金。关于问卷内容,第一页,介绍实验目的、实验步骤、实验要求;第二页,向被试展示实验材料,包括机器人图片;第三页,心灵感知、可控性感知等量表,以及注意力测试题;第四页,被试背景调查,涉及性别、年龄等,以及对机器人的熟悉程度和使用经验;第五页,致谢。为检验被试是否认真作答,针对模拟情景设计了两个问题:酒店顾客购买的是什么?这次服务失败的原因是什么?最终,剔除无效问卷,获得132 份有效问卷。其中,男性占53.0%,平均年龄为28.3 岁,本科学历占69.7%,普通职员占59.8%,月收入5001元~8000元占65.2%。
3 数据分析
3.1 实验操纵检验
对于服务失败类型的操纵检验,主要根据问题“这次服务失败的原因是什么?”,过程失败组的被试选择“收到了饮料,但按键很费劲”,结果失败组的被试选择“我想要饮料,但却送来牙刷”。对于心灵感知的操纵检验,高水平心灵感知组得分均值大于低水平心灵感知组(M高=4.81>M低=3.30),且这种差异是显著的(F=133.87,p<0.001)。上述分析表明变量被成功操纵。
3.2 主效应与中介效应检验
为检验H1 和H2,执行多元线性回归分析,估计结果见表2。从模型4 可知,服务失败类型负向影响责任归因(β=-0.434,p<0.001),即过程失败比结果失败更能引起对机器人的责任归因。这表明H1得到验证。另外,执行方差分析,发现过程失败的责任归因程度大于结果失败的责任归因程度(M过程失败=4.02>M结果失败=3.42,F=33.21,p<0.001),这再次验证H1。进一步,在模型2 中,服务失败类型负向影响可控性感知(β=-0.341,p<0.001)。在模型5 中,服务失败类型负向影响责任归因(β=-0.311,p<0.001),可控性感知正向影响责任归因(β=0.360,p<0.001)。因此,基于温忠麟等(2004)的中介效应检验标准,可控性感知在服务失败类型与责任归因之间发挥部分中介效应,表明H2 得到验证。最后,执行Bootstrapping 中介效应检验,服务失败类型对责任归因的间接效应值为-0.161,置信区间[-0.284,-0.078]不包括0,说明中介效应存在,支持H2。

表2 主效应与中介效应检验结果
3.3 有调节中介效应检验
本文通过拟人化间接操纵心灵感知,所以不能简单以拟人化分组来确定心灵感知组别,故选取心灵感知量表得分来检验有调节中介效应。在SPSS PROCESS插件中,设定抽样样本量为5000,偏差校正置信度为95%,将性别、年龄、学历等控制变量纳入模型分析,最终检验结果见表3。由表3可知,当心灵感知取值为2.994(均值-标准差)时,可控性感知的中介效应不存在,因为间接效应值的置信区间[-0.127,0.062]包括0,故不显著。当心灵感知取值为4.058(均值)和5.122(均值+标准差)时,间接效应值分别为-0.140 和-0.254,置信区间都不包括0,表明都达到显著水平。此外,当心灵感知取值为第10 百分位数(2.333)和第25 百分位数(3.333)时,间接效应值均不显著,置信区间分别为[-0.076,0.186]和[-0.161,0.004]。当心灵感知取值为第50百分位数(4.333)、第75百分位数(4.667)和第90百分位数(5.000)时,间接效应值都处于显著性水平,分别是-0.170、-0.205、-0.241。总体上看,当心灵感知水平低时,可控性感知的中介效应不存在,但当心灵感知水平高时,可控性感知的中介效应存在,并且心灵感知水平越高,中介效应越强。进一步,有调节中介效应指数为-0.108,置信区间[-0.205,-0.037]不包括0,达到显著性水平(见表4)。因此,H3得到验证。
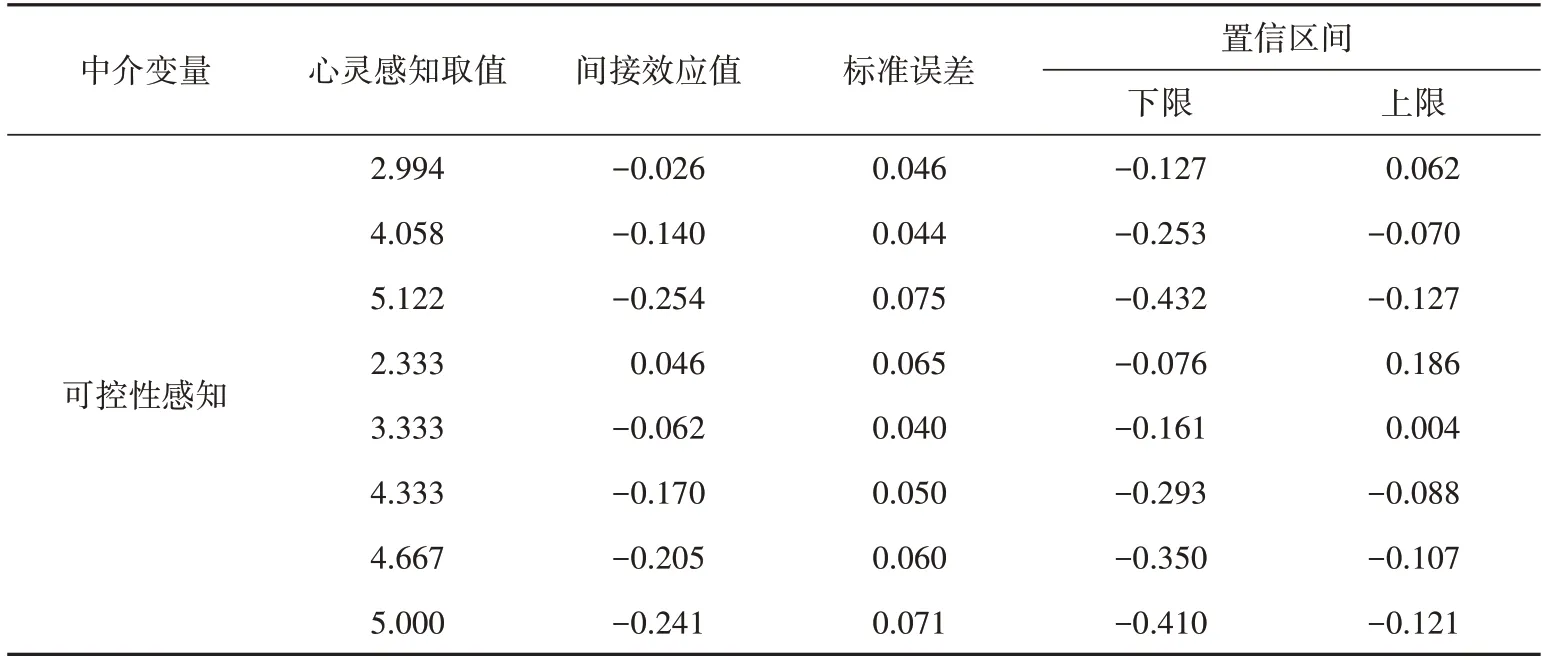
表3 有调节中介效应的检验结果

表4 有调节中介效应指数
4 结论与启示
4.1 主要结论
本文以酒店机器人为对象,综合责任归因理论与心灵感知理论,揭示了服务失败类型对责任归因的影响机制与边界条件。研究结果表明:服务失败类型(过程失败vs.结果失败)负向影响责任归因,其中可控性感知在二者关系中发挥部分中介作用。换句话说,过程失败相比结果失败更能使顾客将责任归因于机器人,这是因为顾客认为机器人对过程失败的可控性高于结果失败。此外,研究还发现心灵感知会调节上述中介效应。具体来看,当顾客对机器人的心灵感知水平评价高时,服务失败类型会通过可控性感知影响责任归因;当顾客对机器人的心灵感知水平评价低时,服务失败类型不会通过可控性感知影响责任归因。进一步,在心灵感知处于高水平时,心灵感知水平越高,中介效应越强,即过程失败相比结果失败会使顾客感知到更高的可控性,进而提高对机器人的责任归因。
4.2 理论贡献
本文的理论贡献如下:
第一,探讨了酒店机器人服务失败问题。近年来,服务机器人成为业界和学界关注的热点,其中关于酒店机器人的文献相对较少,主要涉及酒店机器人服务体验与质量评价(Chan et al.,2019)、顾客与酒店机器人互动交流(Choi et al.,2019)、对酒店机器人的服务管理(Xu et al.,2020)等。虽然有部分研究提到酒店机器人服务失败,但都没有聚焦于此进行理论分析与检验。因此,针对两种不同的服务失败类型,本文解析酒店顾客责任归因的心理路径与边界条件,弥补了酒店机器人服务失败研究成果的不足。
第二,揭示了过程失败与结果失败对责任归因具有差异化的影响。通常来说,由于机器人相比员工对服务失败的可控性更低,所以顾客更可能将责任归因于员工和企业而非机器人(Leo et al.,2020)。那么,这种责任归因逻辑是否会受到服务失败类型的影响呢?对此,现有文献并未给予解答。考虑到过程失败和结果失败是两种常见的服务失败类型,故本文以酒店机器人服务为场景,对比分析了两种失败在责任归因上的差异性,对Leo等(2020)的成果进行了拓展与延伸。
第三,明确了心灵感知在责任归因过程中发挥的关键作用。以往研究证实心灵感知会影响责任归因(Gray et al.,2007),但鲜有研究者将其应用于检验心灵感知对责任归因过程的调节效应。本文通过理论推演并实证分析发现,心灵感知会调节服务失败类型通过可控性感知作用于责任归因的中介路径。可见,对酒店机器人的心灵感知评价会影响对服务失败的责任归因过程,这丰富了对机器人服务失败责任归因的边界条件。
4.3 实践启示
根据本文研究结论,提出两点实践启示:
第一,按照过程失败与结果失败,对机器人服务失败进行管理。在遭遇机器人服务失败时,酒店顾客会依据失败类型与可控性感知,判断机器人应该承担多大的责任,即相对于结果失败,过程失败更能引起对机器人的责任归因。由于酒店机器人服务还处在起步阶段,所以管理者还很少关注机器人服务失败,而将结果失败与过程失败区别对待的情况就更少。因此,建议酒店管理者不仅要重视机器人服务失败,而且还要按照失败类型进行差异化管理。例如,从响应速度看,酒店应该给予结果失败更快的响应。换句话说,在资源有限的情况下,酒店应优先解决结果失败而非过程失败问题。进一步,通过提升机器人的智能化水平,使机器人逐步扮演重要的类员工角色,从而自主帮助顾客解决服务失败问题。
第二,在对机器人服务失败进行管理时,要评估顾客对机器人的心灵感知评价。如果顾客对酒店机器人的心灵感知水平评价高,那么他们会更倾向于认为机器人有能力做好服务,故而更可能会将服务失败归因于机器人。相比结果失败,过程失败会带来更高的责任归因,这是因为机器人对结果失败的控制力弱于过程失败。不过,当顾客对酒店机器人的心灵感知水平评价低时,无论是过程失败还是结果失败,顾客都会认为机器人的可控性较差,会将责任较少地归因于机器人。对于酒店机器人,顾客的心灵感知评价会因人而异,因此建议对顾客的心灵感知评价进行评估,从而为机器人服务失败管理提供指导。
4.4 不足与展望
本文还存在一些局限,未来可以继续探讨:首先,情景模拟法的外部效度不好。下一步可以在真实场景下开展现场实验,分析本文模型与结论的普适性,从而更好地指导管理实践。其次,未考虑影响责任归因的其他因素,如服务失败的严重性、服务机器人的自主性、顾客对酒店的态度等。另外,本文只关注了消极服务体验的责任归因,未来还可以继续讨论机器人服务积极体验的归因。
猜你喜欢
心理学报(2023年7期)2023-07-08 03:10:52
中国石油石化(2021年9期)2021-07-17 09:24:16
海峡姐妹(2020年4期)2020-05-30 13:00:18
文苑(2018年19期)2018-11-09 01:30:22
读者(2017年8期)2017-03-29 08:45:29
汽车文摘(2016年11期)2016-12-08 15:10:11
小雪花·成长指南(2016年11期)2016-12-07 06:32:43
山东青年(2016年1期)2016-02-28 14:25:27
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:37
中国洗涤用品工业(2015年6期)2015-02-28 19:02:35
