基于光纤干涉原理的转机监测振动传感器设计
2021-09-22 04:11:04刘宗麟宋继红刘会杰衣文索李东旭
吉林大学学报(理学版) 2021年5期
刘宗麟, 宋继红, 刘会杰, 衣文索, 李东旭
(1. 长春大学 电子信息工程学院, 长春 130022; 2. 长春理工大学 光电工程学院, 长春 130022)
大型转机是电力电源、 输水水泵、 飞机发动机和电力系统中的重要设备, 其稳定运行对于确保电力生产安全至关重要[1-2]. 一个机械系统由转体自身、 转机外壳和外部负载构成, 其内部结构复杂且不对称. 在整个转机内部系统中存在多种振动, 包括系统外振源传递的强迫振动及系统自身产生的自由振动. 由于振动会产生大量噪声, 导致其机械结构逐渐损坏, 最终损坏转机. 因此, 对转机振动产生的原因进行分析研究并达到实时监测已引起人们广泛关注[3]. 通过对转子振动信息的分析, 可获得转机的运行状态. 大多数传统的电加速度传感器均可监测转机的振动状态, 但其灵敏度较低, 抗电磁干扰能力较差, 且需外部对其供电, 使其应用范围较小.
目前, 对大型转机振动监测主要有数字信号处理器(DSP)、 半在线振动监测系统、 虚拟仪器与网络技术结合、 云计算技术、 全光纤自混合光纤干涉测振技术、 Peakvue技术等方法. 在转机振动监测系统中, 以DSP芯片为核心, 将锁相环和外部晶振等模块整合, 使其成为一套完整的检测系统, 并对外部接口电路进行拓展, 组成了结构更复杂、 功能更完善、 对转机振动监测更准确的系统[4]. 半在线振动监测系统可对转机运行状态和故障位置等进行定向监测, 但无法采集转机在故障状态下的运行情况[5]. 在虚拟仪器与网络技术结合中, 利用NI数据采集卡、 速度传感器以及振动传感器进行转机振动数据采集, 通过Butterworth滤波器、 小波分析、 快速Fourier变换和功率谱分析对数据进行处理, 将得到的波形与实验结果进行比对, 从而完成对转机振动的监测[6]. 云计算具有灵活性高、 可拓展性强、 应用形态灵活等特点, 将其在便携式转机振动监测仪的振动量处理单元中引入服务器, 通过硬件与软件相结合的方法, 将振动检测模块与数据处理模块分离, 从而减轻了监测仪对数据处理的负担. 但仅实现了Fourier变换的频谱分析, 未加入更多的频谱分析技术[7]. 在全光纤自混合干涉测振技术中, 通过研究转机的电磁故障和机械故障, 设计了全光纤自混合干涉传感器, 提出了可实现目标结构在非保偏环境下高精确度、 高灵敏度、 高精密度重构的基于正交信号分解时域解调技术, 但由于光的传播和散射与电光晶体主轴存在一定角度, 导致信号强度偏振减弱, 因此使带有转机振动的信号产生失真现象[8]. Peakvue技术可离线对转机振动数据进行监测, 通过分析振动波形的时域图和频谱图, 可准确找到转机设备的故障点, 但实时性较差[9].
基于此, 本文采用无源器件的光纤传感器, 该传感器具有不受电磁干扰、 灵敏度较高、 结果精确和实时性强等优点, 在传感振动、 自然灾害预警监测和大气探测等领域应用广泛[10]. 用Mach-Zehnder(简称M-Z)干涉仪作为实时监测转机振动的光纤传感敏感元件, 通过对后端数据的采集和处理进行振动分析, 得到转机运行的实时状态, 从而实现对转机实时监测的目的[11].
1 传感系统原理
1.1 转机故障分析
转机在正常运行时, 其内部的磁极、 转子和机壳等零件稳定运行, 但转机磨损或松动后, 其物理振动特性发生变化, 与转机正常运行时的振幅和振动周期存在显著差异.
传统的转机故障监测方法通过对转机运行时产生的振动信息进行时域、 频域或复频域分析. 转机在无外界振动干扰时, 振动信号的频谱主要由基带信号f0及其各倍次频带信号2f0,3f0,4f0等组成.当转机非正常运转时, 其频率特性发生改变, 频谱的基本频率和多倍次频率大小和幅度发生变化.通常基带信号的频率f0越大, 转机的转速越快, 与基带信号f0对应的振幅远大于任何多频带信号的振幅[12].
通过离散Fourier变换(DFT)将信号由时域变为频域进行频谱分析, 其表达式为
(1)
其中S(ω)为频率谱密度,X(n)为离散采样值.
1.2 光纤传感原理
传感光纤具有光弹性效应, 当光纤受外界振动和干扰时, 其长度、 带宽系数、 光功率信号和截止波长等参数发生改变, 导致纤芯内部包含振动信息的透射光的相移发生偏移, 从而影响了光纤的响应特性[13-14].M-Z干涉仪感知外界干扰, 使光在传输过程中相位发生变化的原理如图1所示.由图1可见, M-Z干涉仪由C1和C2两个3 dB耦合器连接, 其中L为光纤总长度,n为光纤折射率,D为光纤纤芯直径.

图1 M-Z干涉仪感知外界干扰的相移原理Fig.1 Phase shift principle of M-Z interferometer sensing external interference
当入射光振幅为Ei, 初始相位差为φ0(φ0为任意角度)时, 传感光纤在无外界振动时的输出[15]为
Eo=Ei×cos(ωt+φ0).
(2)
当自然频率的光在光纤中通过时, 相位
φ=βL,
(3)
其中β为传播常数,β受光纤纤芯杂质、 光纤材料折射率不均匀和光纤挤压弯曲等影响.当外界环境振动时, 对于外部环境的振动, 由于光纤传感器变形, 因此光纤参数发生变化.在外界振动的作用下相移可表示为

(4)
式(4)中等号右边第一项、 第二项和第三项分别表示由于弹性形变、 Poisson效应和光弹性效应引起的光纤长度、 光纤纤芯直径和光纤折射率改变导致相位发生变化.当传感光纤受外界振动作用时, 产生相位差Δφ, 此时传感光纤输出为
Eo=Ei×cos(ωt+φ0+Δφ).
(5)
M-Z干涉仪由传感臂光纤和参考臂光纤两路组成, 二者共同作为光纤振动传感器的基本传感单元, 当无应力应变时, 传感臂与参考臂两条路径中的两相干光的初始相位差为π/2 . 当外界产生应力应变时, 由于光纤受挤压和弯折等影响, 光纤内部发生相位变化, 导致传感臂与参考臂两路相干光的相位差变为π/2+Δφ(Δφ为任意角度). 改变两个相干光的相位差可导致两个相干光的干涉光强度发生变化. 因此, 通过分析干涉光强度的变化, 可确定两个相干光的初始相位差和相位变化.
2 系统方案设计
2.1 光纤振动传感系统
光纤振动传感系统示意图如图2所示. 设计以M-Z干涉仪(虚线框所示)为传感单元, 以1 550 nm激光器为光源, 其发出的光波先通过环形器R1输入耦合器C1中, 再经C1以各50%的比例分为两束光, 分别在参考臂光纤和传感臂光纤中传输.

图2 光纤振动传感系统示意图Fig.2 Schematic diagram of optical fiber vibration sensing system
当转机运行状态发生变化时, 由于受到感应振动, 传感臂光纤产生应变, 因此相位发生调制. 当在耦合器C2处两束光发生干涉时, 转机振动信息包含于发生干涉信号的相位变化中. PIN光电探测器的作用是对电压电流信号进行取样、 整形、 滤波、 放大, 先将受到干涉后的光信号转化为电信号, 再通过A/D转换将连续变化的模拟信号转换为可观测转机振动的离散数字信号. 振动信号经处理和优化后, 最终实现了在PC机上对转机振动的实时监测.
2.2 传感器结构设计
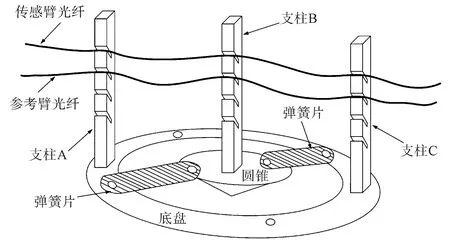
图3 传感器结构Fig.3 Sensor structure
为增加传感器灵敏度及稳定性, 设计传感器的结构如图3所示. 在底盘支座上安装3个支柱, 分别为支柱A、 支柱B、 支柱C, 其中支柱A和支柱C分别固定在底盘的两边, 支柱B固定在中间圆锥上, 圆锥通过两个弹簧片与底盘连接. 当发生振动时, 由于支柱B未与底盘紧密固定, 圆锥与弹簧片构成的稳定状态易被打破, 因此支柱B的振动幅度远大于支柱A和支柱C的振动幅度. 当振动非常微弱时, 支柱B也能出现较好的振动, 从而增加了传感器的灵敏度.
将M-Z干涉仪的传感臂光纤和参考臂光纤分别固定在三个支柱的凹槽上, 当底盘有轻微振动时, 中间的支柱即可带动干涉仪产生较大振动, 从而提高了振动灵敏度.
2.3 信号处理电路
为分析光强度信号, 需将光强度信号转换为电信号, 并通过在相反方向上处理和分析电信号获得光强度信号. 单路信号处理交换电路原理如图4所示. 信号处理交换电路主要将模拟信号变换为用于数据采集和控制的数字信号[15]. 经耦合器C2出来的干涉光信号先通过PIN光电探测器转换为光电流, 再通过跨阻放大转变为可处理的电压电流信号, 电压电流信号经滤波及幅值放大后得到可采集的振动信号.
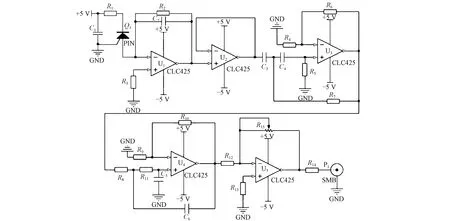
图4 单路信号处理交换电路示意图Fig.4 Schematic diagram of signal channel signal processing switching circuit
3 实验数据分析
用额定功率为2.8 kW、 额定转速为2 680 r/min的小型转机进行实验, 将光纤传感器固定到待测转机外壳上, 并与其紧密接触, 使光纤传感器可实时感知转机的振动, 从而达到对转机振动信息的实时采集, 用解调仪对转机的振动信息进行解调.
为正确判断转机的运行状态, 先提取和分析转子正常运行时的振动信息, 以便与转子故障时的振动信息进行比较. 当转轮运行时, 将采集的振动信息与正常运行时的振动信息进行比较, 若二者相差较大, 则认为转轮处于非正常运行状态.
转机正常运行时获得振动信号的时域和频域如图5所示, 其中(A)为正常运行时转机的时域, (B)为正常运行时转机的频域. 由图5(A)可见, 转机正常运行时振动信号平滑, 振动幅度较小; 由图5(B)可见, 转机正常运行时振动频率约为50 Hz, 在振动频率2倍(100 Hz)时出现小振幅, 其他频率基本无振动信号, 转机稳定运行.
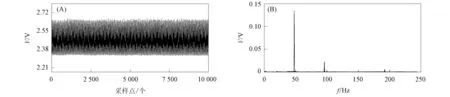
图5 转机正常运行时的振动时域(A)和频域(B)Fig.5 Vibration time domain (A) and frequency domain (B) of rotor during normal operation
转机负载对转机运行时的振动状态影响较大. 当转机负载减少时, 转机受较小的转向阻力, 在不改变其他条件下, 频率随转速的增大而增大, 导致转机振动幅度减小.
为模拟转机使用年限久、 外壳结构松弛等故障, 将转机外壳螺母拧松后进行实验. 产生的振动时域和频域如图6所示, 其中(A)为转机壳体结构松弛时的振动时域, (B)为转机壳体结构松弛时的振动频域. 由图6(A)可见, 转机振动幅度较大且不稳定, 转机壳体有显著振动; 由图6(B)可见, 当转机壳体结构松动导致转机异常运行时, 振动信号频谱除基带信号和每个倍频带信号外, 还含有大量的大幅度随机频率振动. 因此, 当出现类似图6(B)所示信号频谱时, 可判定转机壳体处于异常状态.
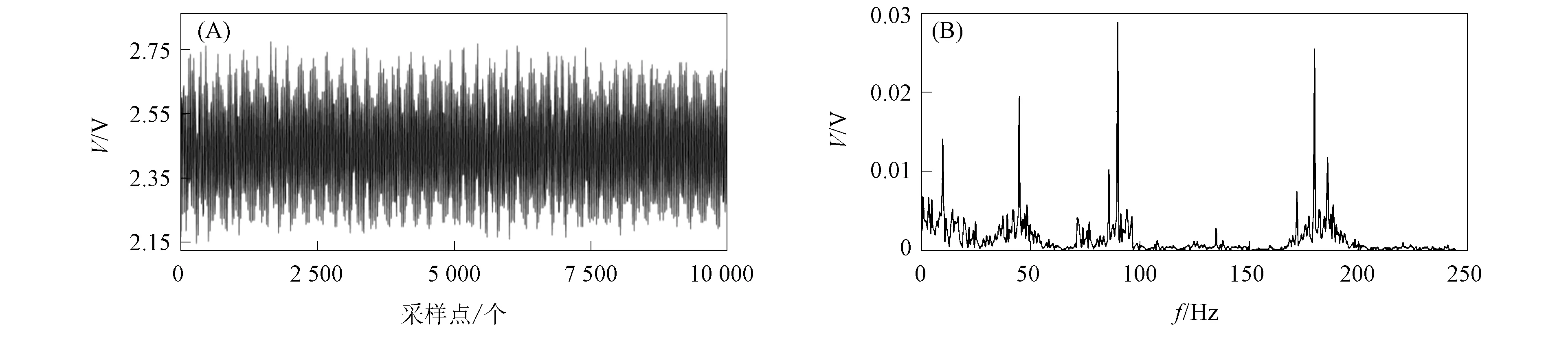
图6 转机壳体结构松弛时的振动时域(A)和频域(B)Fig.6 Vibration time domain (A) and frequency domain (B) when rotor housing structure is relaxed
综上, 本文利用光纤干涉原理、 分布式光纤传感技术及信号调理电路等方法, 通过分析转机振动传感和故障监测原理, 设计了以M-Z干涉仪为传感单元的光纤振动传感器, 用1 550 nm波长激光器作为光源, 先通过环形器、 3 dB耦合器及PIN光电探测器处理, 再采集振动信息并对其进行分析, 最终在输出端对转机振动进行实时监测, 经模拟转机载荷实验和故障实验, 分析频谱可实时监测转机的运行状态. 本文设计的传感器具有灵敏度较高、 实时性强、 结构简单、 不受电磁干扰等优点, 具有较好的工程应用前景.
猜你喜欢
雷达学报(2018年3期)2018-07-18 02:41:34
能源(2017年7期)2018-01-19 05:05:05
故事林(2017年19期)2017-10-17 19:33:00
重型机械(2016年1期)2016-03-01 03:42:11
领导科学论坛(2016年4期)2016-02-28 09:18:37
火控雷达技术(2016年1期)2016-02-06 02:17:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
少儿科学周刊·儿童版(2015年7期)2015-11-24 03:50:09
电测与仪表(2015年3期)2015-04-09 11:37:24
世界科学(2013年11期)2013-03-11 18:09:46