CBTC系统中接近锁闭区段的计算与应用场景说明
2021-09-18 00:46:58闫贝贝徐恒亮
铁道通信信号 2021年8期
闫贝贝,徐恒亮
在地铁CBTC系统中,进路锁闭分为预先锁闭和接近锁闭[1]。预先锁闭应在进路选通、有关联锁条件具备时构成[2];接近锁闭在信号开放、进路的接近锁闭区段占用时构成[3]。当构成接近锁闭后,取消进路时需等待一段时间,确保列车安全停稳后方可解锁进路[4]。在CBTC系统中,由于ATC车载系统和车地无线通信的引入,以及CBTC和BM的不同模式存在,使得计算接近锁闭区段长度时,需考虑CBTC系统自身的特点并综合不同的条件[5]。
1 接近锁闭区段长度的计算
1.1 CBTC模式接近锁闭区段的计算
CBTC 模式下,分为3 个部分进行计算:触发制动到开始施加制动的时间内,列车走行的距离D1;施加制动后,列车完全停车走行的距离D2;不确定的距离D3。
由于接近锁闭区段的长度是与安全相关的参数[6],在计算D2 时,列车初始速度需考虑线路最大限速。通常先采用本线路最大的限速值,估算出一个最大的停车距离;再按照这个距离,从进路始端信号机方向开始,判断这个距离范围内可以覆盖的最大限速,若该距离范围中有更小的限速出现,则采用更小的限速值计算,如此迭代下去,直到没有出现更小的限速值,则此时计算的结果为最后算得的结果。计算流程见图1。
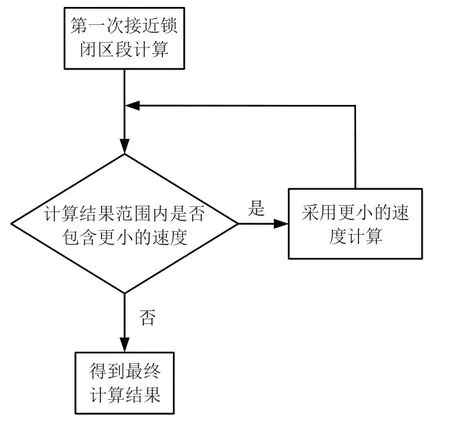
图1 D2计算流程简图
D3 由一些系统检测不到的长度组成,如列车车钩长度、区段检测盲区等。
综上,CBTC 模式下的接近锁闭区段长度为D1+D2+D3,只有列车占用相关信号机防护方向后方D1+D2+D3 长度范围内的区段时,才构成接近锁闭。
1.2 BM模式接近锁闭区段的计算
BM 模式接近锁闭区段的长度,除了考虑上述CBTC 模式下的D1,D2,D3 外,还需要考虑BM模式下信号机的预告信标位置。
当轨旁ZC 设备或者车地无线通信故障时,CBTC 可降级为BM 模式运行。在BM 模式下,列车读取点式信标,获取信号机、道岔状态,对列车进行ATP 安全防护。为提高列车运行效率,通常在距离主体信号机一段距离内,放置一个预告信标,预告该主体信号机状态,让列车提前预知前方信号机为允许状态,避免列车在区间停车。
如图2所示,信号机X2的预告信标为B2,B2将预告X2 的状态。当列车经过B2,进入L1 范围内,此时列车获取X2是允许状态。若接近锁闭区段不包含B2,则会出现未构成接近锁闭时,列车就已读取B2,获取X2 为允许状态。此时由于不构成接近锁闭,CI不需要延时解锁,就可直接取消进路,但这时车载已经获取X2为允许状态,认为进路仍然有效,将出现进路已解锁但车载仍授权运行的危险状况。

图2 接近锁闭区段长度计算简图
为避免上述危险场景,BM 下的接近锁闭区段长度,必须覆盖至预告信标B2 的这段距离L1。另外,列车读取B2 前,联锁检测区段的占用以及预告信标B2接收到前方信号机X2为禁止状态也都存在一定的延时,在这段延时内列车走过的距离,也需要考虑进接近锁闭的长度计算中。如果只考虑L1,那么构成接近锁闭后需人工取消进路时,就会出现列车读不到X2是禁止信号的情况。
因此,BM 模式下,分为2 个部分进行计算:信号机到预告信标间距离L1;联锁检测区段占用、预告信标接收到前方信号机为禁止状态的时间内,列车走过的距离L2,最后再加上计算过程中的D3。
由于日常运营中,存在CBTC与BM 混合运行的情况,所以接近锁闭区段最终计算结果要取CBTC 和 BM 计算的最大值,即 Max (CBTC,BM)。
1.3 跨联锁边界接近锁闭区段的计算
在实际应用中,经常会出现接近锁闭区段跨越2 个联锁区域的情况。接近锁闭区段为信号机的相关属性定义,因此跨联锁边界的接近锁闭区段需要在2个联锁区域之间传递相关的信息。
如图3 所示,在计算跨越联锁边界的接近锁闭区段时,需考虑如下过程中的延时:T1,列车被联锁1 范围内的计轴/轨道电路检测到占用;T2,计轴/轨道电路将占用信息传给联锁1;T3,联锁1传递接近锁闭区段占用信息到联锁2;T4,联锁2传递信号机状态到区域控制器;T5,通过车地无线通信,区域控制器将信号机状态传输到车载控制器。
需注意,无车地无线通信下的BM 模式,没有T5。
2 不同应用场景下接近锁闭的说明
构成接近锁闭后,需要等待一段时间保证列车停稳后,方能解锁进路,这段时间称为接近锁闭解锁时间[7]。接近锁闭解锁时间是按照列车以接近区段内最大速度运行时,触发列车制动到完全停车的时间[8]。
2.1 CBTC与BM模式
如图3 所示,CBTC 模式下,车载与轨旁通过车地无线通信。当构成接近锁闭后,若取消进路,此时联锁系统会将已经开放的进路始端信号机关闭,并通过图3 中的步骤T4,将取消进路信息传递到区域控制器,区域控制器通过步骤T5,回缩列车的授权终点至始端信号机,保证列车在接近锁闭时间内,列车在信号机前停车。由于接近锁闭解锁时间考虑最不利条件下可保证列车停车的时间,因此一般情况下,列车停车后,接近锁闭时间还未结束,但此时列车已经停稳,进路解锁没有安全风险,还要等待剩余的时间才能解锁,于是在一定程度上影响了运营效率。为此,利用CBTC 模式下车地通信通道,车载控制器可将列车停稳信息发送到区域控制器,区域控制器授权联锁提前解锁进路,从而在保证安全的前提下,减少实际解锁的时间,提高了进路使用的效率。
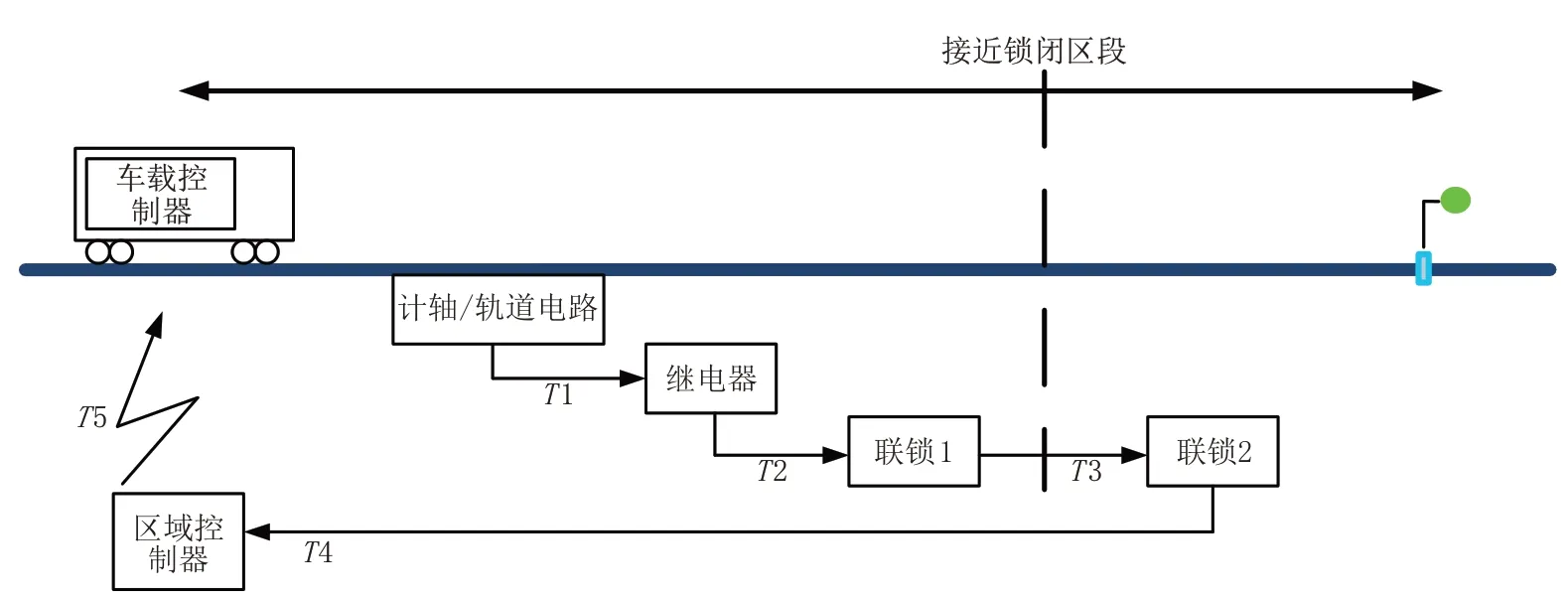
图3 跨联锁区域的接近锁闭信息传输
BM 模式下,车载与轨旁无线通信不可用,故列车的停稳信息无法送至区域控制器和联锁。一旦构成接近锁闭,若需要解锁进路,则需要等待接近锁闭时间全部走完,进路才能解锁。由于BM 模式为CBTC 降级下使用,多为故障导致的降级情况,不能像CBTC 模式那样提前解锁,因此运营效率较CBTC 模式低。只能等到接近锁闭时间结束,可保证列车安全停稳,也可保证行车安全[9]。
2.2 多分支接近锁闭
无论是CBTC 还是BM 模式,在很多情况下,接近锁闭区段会根据道岔分成多个路径,构成多分支的接近锁闭区段。如图4 所示,以X2 为始端的进路X2—X1,接近锁闭区段为G4,G3,G2,G1,G7,G8,G9,G10,G11,G12,G13。但并不是这些分支中的某一个区段占用,都会构成接近锁闭条件。联锁系统在构成接近锁闭时,根据P1、P2 的定位、反位,将旁路无关的区段。例如进路X2—X1 已经建立,X2 信号已经开放,道岔P1 为反位,通向侧向,道岔P2 不管是什么位置,该进路均是由P1 反位方向接车,故构成接近锁闭的区段只有G4,G3,G7,G8,G9,G10。其他接近锁闭区段占用,均不构成接近锁闭。
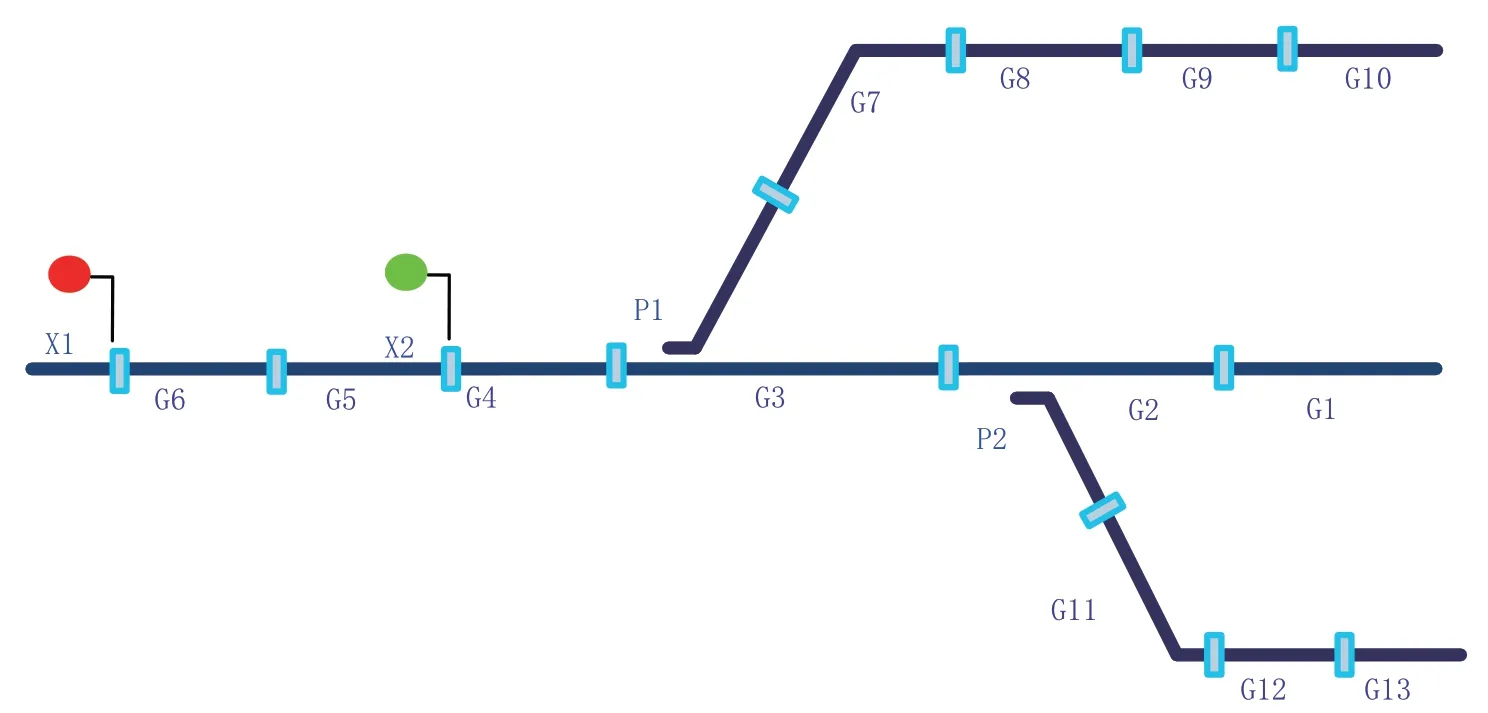
图4 多分支接近锁闭区段
2.3 无条件接近锁闭
在线路的一些特殊位置,如本线路与相邻线路的联络线、正线与车辆段/停车场接口处等,由于两线路采用不同的联锁系统,受相互传递信息、变量等限制条件,接口处进路始端信号机可定义为无条件接近锁闭,即该信号机不定义接近锁闭区段。只要进路建立,信号开放,即构成接近锁闭,若要解锁进路,需等待接近锁闭时间结束,才能解锁进路[10]。由于这些地方大多数的操作都是非正常运营时段,因此,无条件接近锁闭不会影响运营效率。
3 结束语
综上,CBTC系统在保证安全的前提下,可根据系统特点,按不同模式、不同路径与场景,对接近锁闭区段的长度进行计算,且根据不同场景应用不同的方法,提升系统的安全性和效率。上述计算,在多条已开通地铁线路中得到实际应用,如苏州地铁4 号线、苏州地铁3 号线以及南京地铁S8 线等CBTC线路,使用效果良好,可以在类似地铁线路中,在计算接近锁闭区段的长度时,作为参考。
猜你喜欢
云南画报(2021年11期)2022-01-18 03:15:34
铁道通信信号(2020年11期)2020-02-07 01:02:12
铁道通信信号(2019年4期)2019-10-10 03:42:44
铁道通信信号(2018年8期)2018-11-10 05:15:42
铁道通信信号(2018年8期)2018-11-10 05:15:38
铁道通信信号(2018年3期)2018-04-19 02:32:56
铁道通信信号(2016年5期)2016-06-01 12:10:20
铁道通信信号(2016年4期)2016-06-01 12:10:19
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
水道港口(2015年1期)2015-02-06 01:25:45