新型震荡水翼应用于实船的推进性能研究
2021-09-18 08:35:40刘佳明吕峰杜易洋张冲
舰船科学技术 2021年8期
刘佳明,吕峰,杜易洋,张冲
(1.江苏科技大学 船舶与海洋工程学院,江苏 镇江 212100;2.中国船舶集团有限公司第七一四研究所,北京 100101)
0 引言
船舶在海上航行时大多处于波浪海况,波浪的存在不仅会使船舶的航行阻力增加约15%~30%,航行过程中产生的剧烈摇晃还会导致螺旋桨失速。在船体安装合适的辅助推进装置可以有效降低波浪对船舶航行的干扰,提高船舶推进效率。震荡水翼能够将波浪能转化为动能,分为主动式和被动式2 种,是船用助推装置中较为常见的形式[1–3]。本文研究的意义在于,以现有的震荡水翼辅助推进装置为基础,提出一种能够有效改善船舶推进性能的新型震荡水翼辅助推进装置,为波浪能助推领域的研究提供更多理论参考。
传统的被动式震荡水翼辅助推进装置主要存在以下不足:
1)为确保水翼处于波谷时仍可正常工作,传统水翼一般安装在自由液面以下较深的位置。但波浪能随深度的增加呈指数下降,即震荡水翼提供的推进效率较低。
2)传统水翼在大角度震荡时,表面易发生涡脱落现象,导致水翼周围的一部分波浪能随脱落的涡一同消失。可转化为动能的波浪能减少,即震荡水翼产生的推力降低。
针对以上不足,分别采取以下2 个措施进行改良:
1)将水翼与可自由沉浮的浮子相连,在确保水翼位于液面以下的同时,减小水翼的深度,采集更多的波浪能。
2)在传统水翼前缘,等间距地增加凸起,用以减少大角度震荡时水翼表面的涡脱落,提高水翼所能产生的动能。
综合以上两点措施,提出如图1 所示的新型震荡水翼辅助推进装置,并将其安装在大型集装箱船(KCS)船首两侧,如图2 所示。
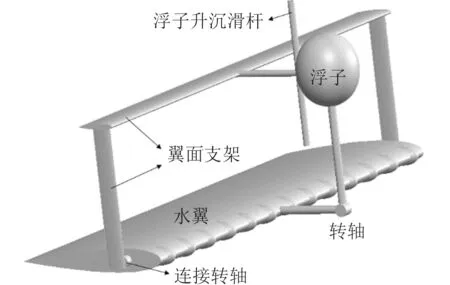
图1 新型震荡水翼辅助推进装置Fig.1 New shock hydrofoil auxiliary propulsion device
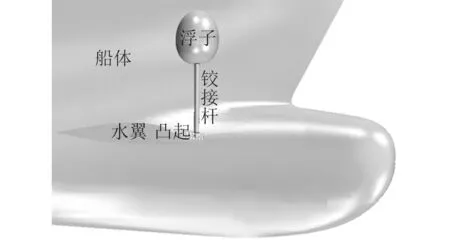
图2 安装装置后的船模Fig.2 Ship model after installation of device
1 三维数值波浪水池
1.1 设置计算域
本文选用KCS 作为数值仿真实验的船型,以其垂线间长LP P为基准,在KCS 船模周围建立尺寸为6LPP×4LPP×3LPP的计算域。船首前方2LPP设为计算域入口,水深设为2LPP,船尾后方3LPP设为出口,并将出口1.5 倍波长区域设为消波区域。
根据上述尺寸设定,建立计算所需的三维数值波浪水池,如图3 所示。
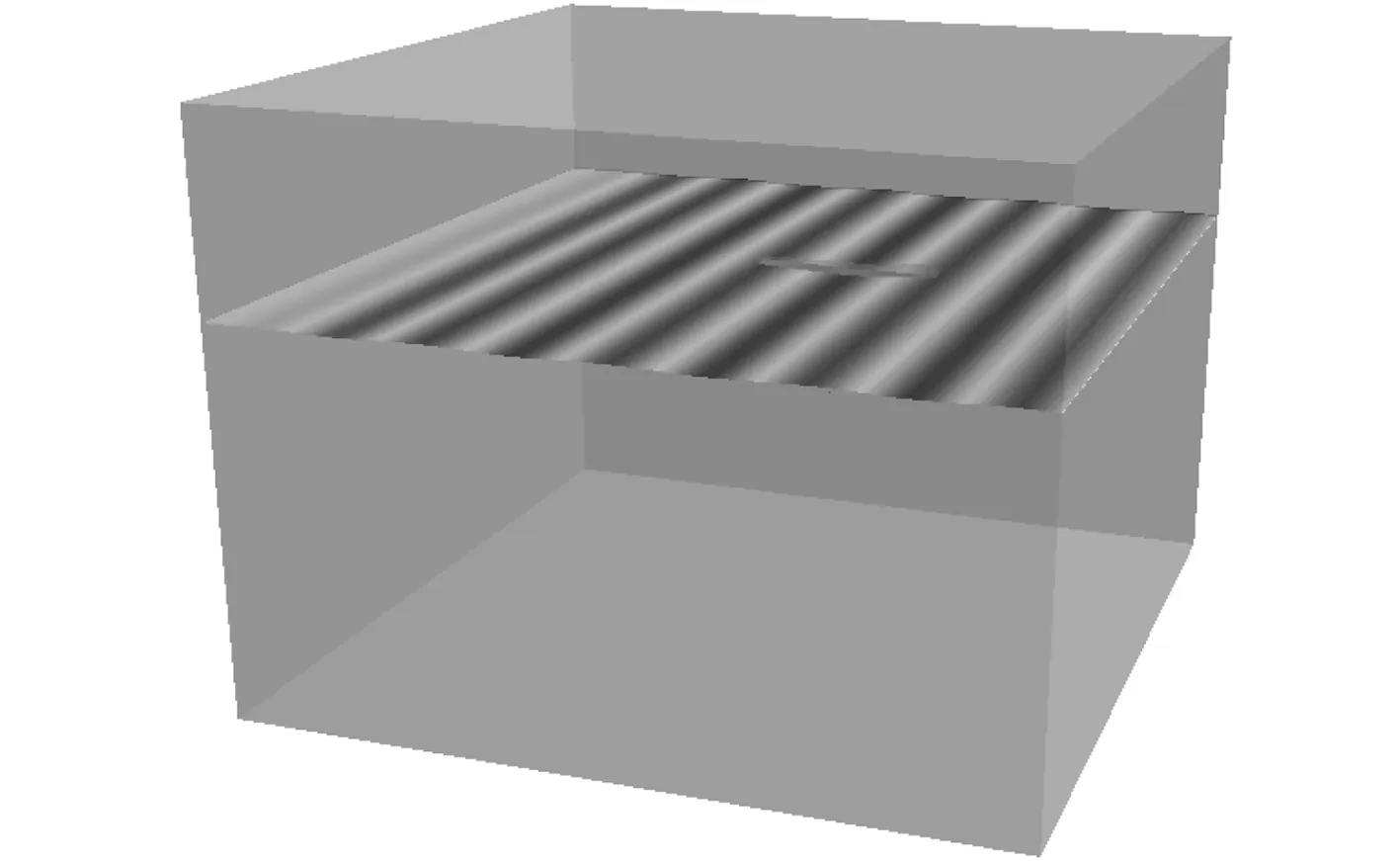
图3 波浪水池Fig.3 Wave tank
在距离三维数值波浪水池底部2LPP的高度设置自由液面,将计算域划分为空气和水2 种介质,并设置波浪的传播方向为X 轴负向,如图4 所示。

图4 自由液面Fig.4 Free liquid surface
1.2 造波与消波
位于自由表面的液体,局部质点受风力等外界因素的扰动,离开原来的平衡位置作周期性上下起伏运动,并同时向周围传播,从而引起了波浪的产生。在CFD 数值仿真实验中,常用的数值造波法通常有3 种:直接输入法,仿物理造波法和源造波法。本文在计算域入口处选用最易仿真模拟同时具有较高精度的直接输入法来构造本文所需的一阶线性规则波,如图5 所示。

图5 一阶线性规则波Fig.5 A linear regular wave
为了预防因数值耗散导致的波浪幅值衰减,在模拟船舶航行状态之前,先对波浪的生成与传播进行模拟。自由液面附近的网格如图6 所示。

图6 自由液面的网格Fig.6 Free liquid surface meshing
以波长6.4 m的入射波为例,通过浪高仪可以得到波长6.4 m的一阶线性规则波波高时历图,如图7 所示。由图可得,由直接输入法构造的一阶线性规则波与通过Stokes 理论得到的波基本一致,即说明了在三维数值波浪水池中运用直接输入法构造一阶线性规则波的适用性与准确性。
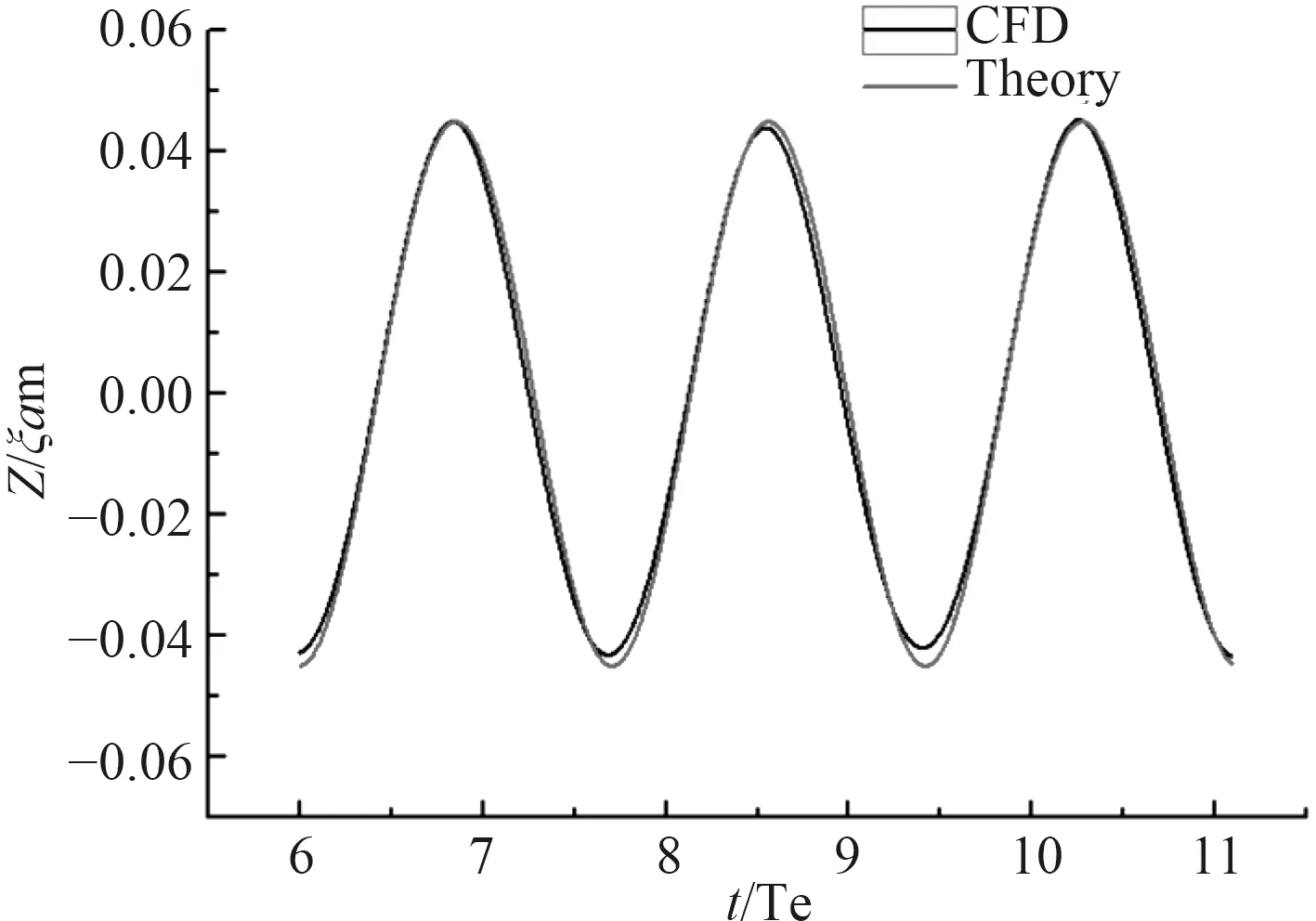
图7 λ=6.4的波高时历曲线Fig.7 The time history of wave height at λ=6.4
在三维数值水池出口处的消波区域中加入人工阻尼进行强制消波,即对流体质点在垂直方向的运动做强制衰减,能够有效减小波浪在到达出口处反射对计算区域造成的影响,从而起到降低计算误差的效果。人工阻尼强制消波的衰减公式为:

式中:wr(x,y,z;t)为经过人工阻尼后流体质点在垂直方向上的速度;η(x,z)为人工阻尼强制消波的衰减函数;s,e分别为消波区域的起点和终点在x方向上的坐标;f,b分别为自由液面和水池底部在z方向上的坐标;τ为控制参数。
由于三维数值水池出口处消波区域的存在,自由液面在靠近出口处的波面逐渐趋于平静。达到稳定后自由液面的波形图如图8 所示。

图8 自由波面波形图Fig.8 Free wavefront waveform
1.3 新型震荡水翼与船舶的耦合
新型震荡水翼辅助推进装置与KCS 耦合,装置中水翼的升沉运动完全跟随船体变化,纵摇运动则只受浮子影响。由此建立船、翼耦合后的运动坐标系,如图9 所示。

图9 船翼耦合后的坐标系Fig.9 Coordinate systems of the coupled model
图中设立了OsXsYsZs构成的船舶运动坐标系以及Of Xf Yf Zf构成的水翼运动坐标系。过船舶重心的垂线与水面的交点为 (i,j=3,5),船舶纵摇运动的转轴为ys,水翼纵摇运动的转轴为Yf,船舶与水翼作升沉运动的方向同为Zf,两坐标系原点Os与Of间水平距离为xb。由此可得船舶与水翼的耦合运动方程为:

式中:M为船体的质量;Aij为船舶的附加质量;Bi j为船舶的阻尼系数;Cij为船舶的恢复系数;Iyy为船舶纵向的转动惯量,下标 (i,j=3,5)分别为升沉与纵摇模态;Fj,Mj分别为船舶受到的波浪力与转动力矩;Lf,Mf分别为水翼受到的升力和转动力矩。
2 网格划分
2.1 重叠网格技术
重叠网格技术[4–6]指将计算域划分为2 个或2 个以上的子域,通过子域的运动来模拟边界之间的相对移动。这些子域和背景区域在空间上重叠,经过挖洞处理后,非计算域的网格不参与仿真计算,重叠区域的网格通过建立插值关系来交换流场信息。一般情况下,自由液面处和船体周围等的网格对模拟船舶航行姿态的影响较大,所以对这些区域的网格作局部加密。
2.2 滑移网格技术
滑移网格技术[7–8]涉及2 个或2 个以上的计算区域,相邻的计算区间都存在至少1 个分界面。在计算过程中,相邻计算区域间沿网格分界面作相对运动,并借助提前设置的边界条件实现区域与区域间的流场信息交换。在处理螺旋桨的相关问题时,2 个计算区域之间只有交界面沿旋转中心的相对滑动,而无其他维度的相对运动,所以一般选用滑移网格技术。
2.3 划分计算网格
对计算域和零部件进行网格划分,如图10 所示。图10(a)在计算域边缘加大网格以提高计算效率,在消波区域沿波的传播方向逐步减小网格密度以确保消波效果。图10(b)和图10(c)因船首尾及装置周围的表面曲率变化较大、流场变化剧烈,所以进行网格加密处理。图10(d)在螺旋桨区域设置滑移网格以确保螺旋桨能够准确捕捉周围流场信息。
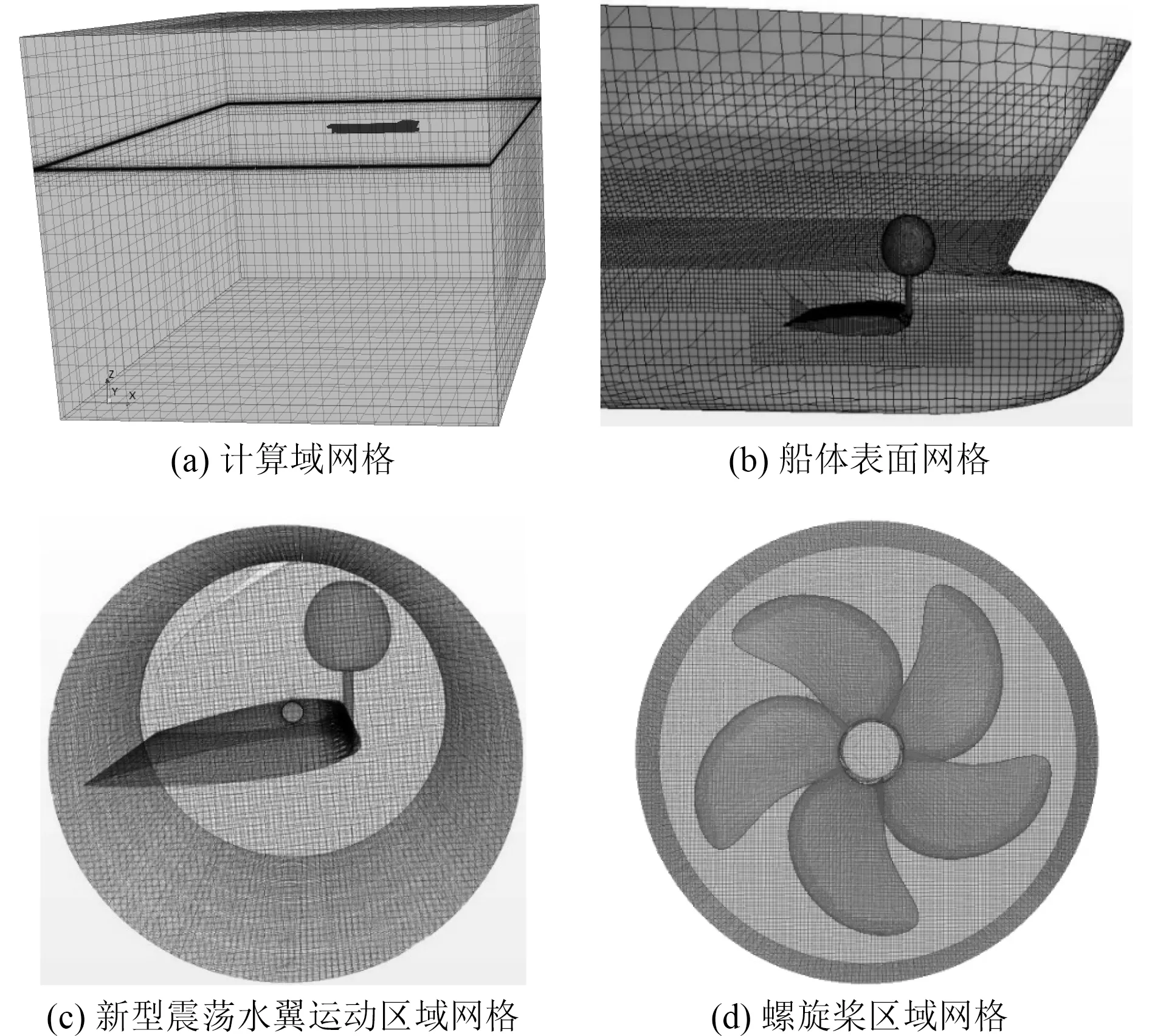
图10 部分网格Fig.10 Partial grid
3 计算与结果
将裸船以及安装新型震荡水翼辅助推进装置的船模分别放入一阶线性规则波中,并使其自航,通过计算对比得到装置对船舶推进性能的影响。首先需要确定船模的自航点转速n,在预估的n前后分别选取2 个螺旋桨转速,然后计算阻力、推力等相关数据并通过插值法可以得到较为准确的船模自航点转速n,最后根据n计算出该工况下的螺旋桨推进效率。
本文所有工况的航速均选取船模的设计航速2.196 m/s。根据控制变量法,分别计算3 组不同波高和3 组不同波长的情况下,加装辅助推进装置前后的KCS 船模的阻力、推进力以及推进效率,以体现新型震荡水翼辅助推进装置对船舶的辅助推进性能。
3.1 不同波长下船舶推进性能分析
计算模型选取KCS 船模,计算航速为船模设计航速2.196 m/s,波高选取0.08 m,0.09 m 以及0.1 m,波长选取3.2 m,6.4 m 和9.6 m,并且引入推进效率来衡量船舶的推进性能,用 η0表示,其计算公式为:

式中:T为螺旋桨推力;Q为转矩;ρ为流体密度;n为螺旋桨转速;D为螺旋桨直径。
通过CFD 数值仿真软件计算并比较安装新型震荡水翼前后各波长下迎浪航行时的总阻力、螺旋桨推力以及螺旋桨推进效率。计算结果如表1~表3 所示。
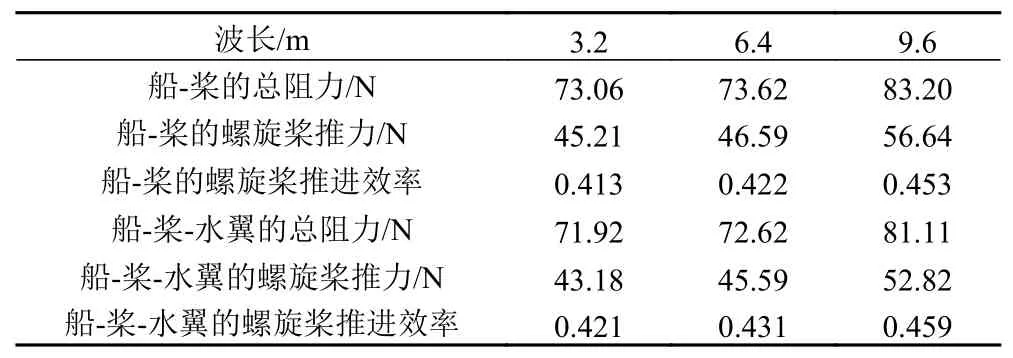
表1 波高0.08 m的计算结果Tab.1 Wave height 0.08 m data

表2 波高0.09 m的计算结果Tab.2 Wave height 0.09 m data
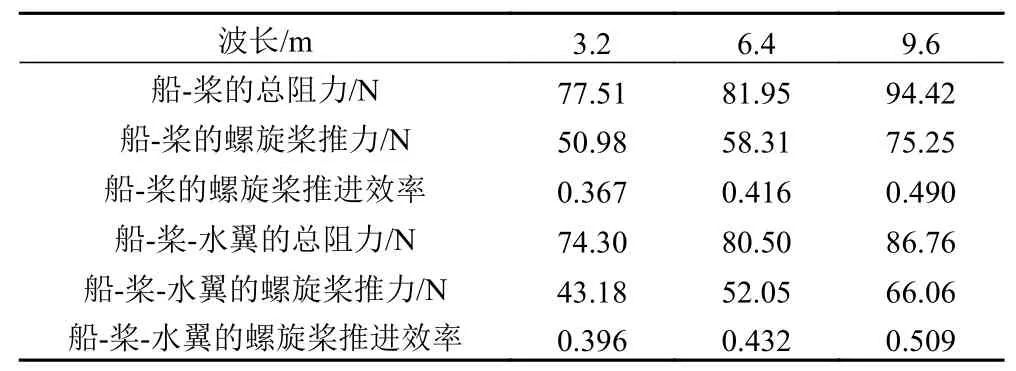
表3 波高0.1 m的计算结果Tab.3 Wave height 0.1 m data
以波高0.09 m的工况为例建立总阻力、螺旋桨推进力、螺旋桨推进效率关于波长的折线图,如图11 所示。

图11 波高0.09 m 不同波长下的计算结果变化图Fig.11 Change chart of wave height 0.09 m at different wavelengths data
由图11(a)可知,船舶在安装新型震荡水翼前后受到的阻力随波长变化的趋势基本一致,由于新型震荡水翼改善了船体的水动力性能,加装水翼后船舶所受总阻力在各波长下都要小于裸船。不仅如此,新型震荡水翼将波浪能转化成动能,为船舶航行提供了额外的推力,所以船舶维持设计航速所需的螺旋桨推力也会降低。由图11(b)可知,安装新型震荡水翼后的船舶,以设计航速航行所需的螺旋桨推力普遍小于裸船所需的螺旋桨推力。由图11(c)可知安装水翼后螺旋桨的推进效率在不同波长时都有所提升,即安装新型震荡水翼辅助推进装置后,船舶的推进性能得到了改善。
图12 为裸船和加装装置船的螺旋桨桨后速度云图,由图可得相同环境下安装新型震荡水翼的船舶螺旋桨桨后速度场分布更加均匀,这表明新型震荡水翼辅助推进装置不仅能减小船舶在航行过程中所受阻力,提高螺旋桨推进效率,还能改善船舶的耐波性。

图12 螺旋桨桨后速度场云图Fig.12 Cloud diagram of the speed field behind the propeller
3.2 不同波高下船舶推进性能分析
选取波长为6.4 m,波高分别为0.08 m,0.09 m,0.1 m的相关数据,分析不同波高下安装水翼前后船舶的总阻力、螺旋桨推力和螺旋桨推进效率。
由表4 可知,相同波长下,总阻力、螺旋桨推力都随波高的增长而增长,但安装新型震荡水翼后的船舶以自航速度在航行过程中所受到的总阻力,以及为了维持设计航速所需的螺旋桨推力都要明显小于裸船,同时推进效率也有显著提升,这说明在不同波高下新型震荡水翼辅助推进装置也较大幅度地改善了船舶在航行过程中的推进性能。

表4 波长6.4 m的计算结果Tab.4 Calculation results with a wavelength of 6.4 m
4 结语
本文运用CFD 数值仿真软件,以控制变量法,对船模在不同波长、不同波高的规则波中的航行状态进行仿真模拟,计算并且对比分析了裸船与加装新型震荡水翼辅助推进装置的船模在波浪中航行的总阻力、螺旋桨推力与螺旋桨推进效率。结果表明本文提出的新型震荡水翼辅助推进装置不仅能够降低船舶在波浪中受到的航行阻力,还能为船舶提供辅助推力,同时提高船舶的耐波性,大幅改善了船舶的推进性能。
本文在仿真计算的过程中,为了降低波浪传播过程中幅值的衰减,同时不影响计算效率,自由液面处的网格数量在波高范围内控制在16~20 个,在波长范围内控制在80~100 个,并且为了预报结果的快速性与准确性,波高方向的网格尺寸与波长方向的网格尺寸之比 (Δz/Δx)控制为1/2 或1/4。此操作经验可供参考。
猜你喜欢
微型电脑应用(2022年12期)2023-01-30 13:40:26
海洋技术学报(2021年3期)2021-08-19 11:07:04
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:20
中国水运(2020年1期)2020-04-22 20:27:07
上海交通大学学报(2020年1期)2020-01-14 09:09:16
厦门理工学院学报(2016年1期)2016-12-01 04:50:53
舰船科学技术(2016年1期)2016-02-27 15:39:15
应用科技(2015年4期)2015-04-28 03:35:04
噪声与振动控制(2015年4期)2015-01-01 07:08:04
航海(2014年6期)2014-12-12 10:36:03