
日本开发智能移动检测系统 可用于隧道衬砌病害快速诊断
2021-09-17 01:02:52
隧道建设(中英文) 2021年8期
1 开发背景
随着城市的建设与更新,早年间建设的交通基础设施正在逐渐老化。在日本,一些公路隧道开通已经长达几十年,随着时间的推移,会出现各种结构病害,危害隧道运营安全。
目前,对公路隧道结构病害的传统探查方式是维护人员进入隧道进行目视检查,但该方法存在以下弊端:
1)公路隧道进行结构探查时,需要至少封闭1条车道,影响隧道内正常运营;
2)若探查在夜间进行,部分隧道内光线不足,可能会对目视探查的准确性产生影响;
3)人工探查极度依赖维护人员的主观判断,容易出现探查遗漏、判断失误;
4)人工探查速度缓慢,存在一定危险性,且人力成本高昂。
鉴于此,日本开发了一种结合非接触式雷达和AI技术的智能移动检测系统(MIMM-R),在隧道内匀速行驶过程中即可了解隧道状况,探知衬砌病害,大幅提高效率与安全性,如图1所示。

图1 搭载MIMM-R系统的智能移动检测车
2 MIMM-R系统
MIMM-R是一种探查+解析一体化的智慧隧道管理系统(见图2),具有高效率、高精度的特点,适用于公路隧道、铁路隧道和桥梁等检修作业。该系统搭载于一辆检测车上,以50 km/h的速度在隧道内行驶,同时进行以下工作:
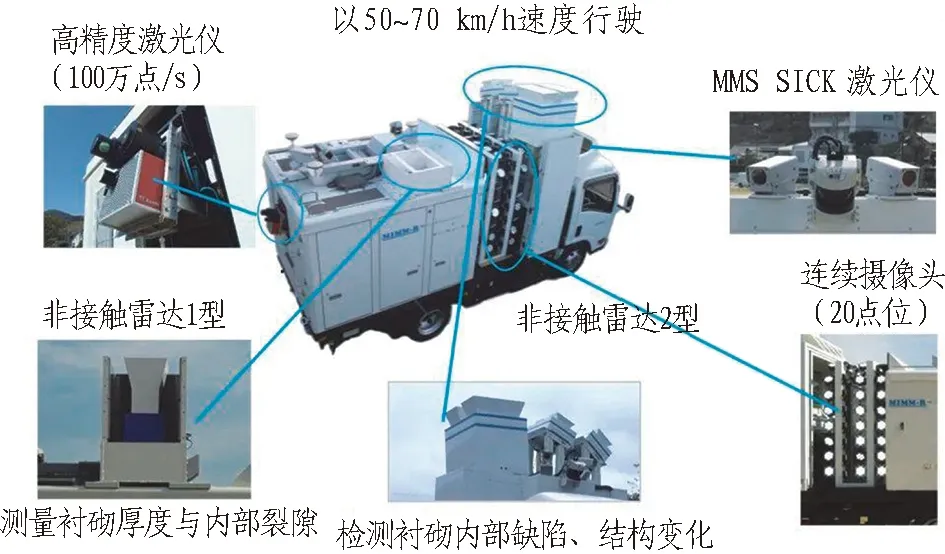
图2 MIMM-R系统
1)激光测量隧道变形。车头与车尾均搭载激光扫描仪,采用100万点/s的高精度激光,精准测量隧道内壁的形状与尺寸,同时探查隧道衬砌的变形模式、裂缝位置、衬砌高差等。
2)隧道影像生产及评估。车身上配备共计20个摄像头,可对隧道表面进行持续性摄像。通过每个摄像头获取的不同图像形成综合成像,结合AI技术可识别0.3 mm以上裂缝,并分析损伤原因。
3)雷达探测。车顶搭载了非接触性雷达,可探测衬砌混凝土背后状态,检测衬砌厚度、衬砌背后的空腔和衬砌内部的病害。
3 系统功能
1)雷达探测。雷达探测是利用电磁波在不同物质之间的边界处反射率不同,以此发现隧道衬砌背后的空腔和结构损害。该系统采用了2种高速非接触式雷达,可在距离衬砌3 m的情况下,探查到衬砌背后细微至0.3 mm的衬砌裂缝与其他病害。
2)3D可视化。检查车不仅能够通过激光扫描仪进行图像测量,还能够进行隧道内的几何测量: 基于激光点云构建3D模型,精确定位隧道变形的位置,同时将隧道原本的3D模型与现场模型的变形处进行叠加显示与对比。
3)AI技术。系统采用了AI深度学习技术,可以自动识别隧道衬砌病害。使用数百张隧道检测图像,训练AI识别并标注隧道内的渗漏水、衬砌开裂与混凝土变质,如图3所示。经过深度学习,AI已能初步分辨不同的隧道病害,并分析未来可能发展趋势。

图3 AI技术自动识别隧道衬砌病害
4 隧道结构病害综合诊断
隧道结构病害的诊断评价需要结合以下3个步骤进行综合分析:
1)从采集图像中检测裂缝、漏水、混凝土表面变质等现象;
2)利用激光点云识别变形模式和损伤位置,评估变形模式产生的原因,识别潜在的变形趋势;
3)利用雷达采集的数据进行衬砌厚度和衬砌背后病害的检测。
将以上数据汇入“综合诊断系统”,通过三维可视化技术对各种状况进行综合评估,之后编入该隧道的养护数据库,具体步骤包括:
1)点云分析。自动检测衬砌施工缝,提取衬砌截面形状等数据,进行变形模态分析。
2)损伤图生成。将衬砌表面图像与点云位置信息相结合,生成裂纹和渗漏水的损伤图。
3)雷达测量分析。衬砌厚度变化、内部结构损害的测量分析结果可与点云信息同步显示,在三维、轮廓、纵向和横向视图中显示。
4)三维可视化。将图像、激光和雷达分析结果以三维形式显示,并结合三者进行变形原因的分析和诊断。
5)生成数据库。存储隧道的历史图像和记录,用于优化维护实施对策。
(摘自 隧道网 https://www.tunnelling.cn/PNews/NewsDetail.aspx?newsId=44197 2021-07-27)
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
今日农业(2022年3期)2022-06-05 07:12:02
今日农业(2021年8期)2021-11-28 05:07:50
河北地质(2021年1期)2021-07-21 08:16:06
烟台果树(2021年2期)2021-07-21 07:18:28
今日农业(2020年19期)2020-11-06 09:29:38
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
贵州科学(2016年5期)2016-11-29 01:25:31
火控雷达技术(2016年3期)2016-02-06 02:30:26
西南军医(2016年6期)2016-01-23 02:21:14
