
基于激光测风雷达的两种低空风切变告警算法对比研究
2021-09-16 13:22张开俊伏龙延李兰倩邵爱梅
干旱气象 2021年4期
张开俊,伏龙延,,李兰倩,邵爱梅
(1.中国民用航空西北地区空中交通管理局甘肃分局,甘肃 兰州 730087;2.兰州大学大气科学学院, 甘肃 兰州 730000)
引 言
低空风切变(简称“风切变”)是发生在跑道及其延长线上空500 m以下的风矢量突变现象[1],常伴随着多种天气系统发生,如雷暴大风、冷锋过境、近地层湍流[2-4]等,不同天气系统造成的风切变位置、强度和持续时间不相同[5-7]。发生在飞机起飞和降落阶段的风切变时常导致飞机复飞等危险情况发生,甚至会造成机毁人亡的惨剧[8-9]。大多数风切变因其自身表现的阵性以及小尺度特点致使利用天气学方法开展预报十分困难。因此,在航空气象领域,风切变一直是影响飞机飞行安全的重要因素之一。
随着气象监测手段日益丰富,利用高分辨率的探测设备对风切变进行识别及告警是民航部门规避风险最为有效的方法,因此研制相关探测设备、发展基于各类设备观测的风切变告警算法成为提高风切变服务保障水平的重要途径[10-13]。目前,风向风速计、多普勒天气雷达、风廓线雷达、激光测风雷达等地基探测设备可以用于识别风切变,但上述设备的探测性能各有优缺点[14]。风向风速计因探测点固定且高度较低,难以实现500 m以下的垂直风廓线扫描;多普勒天气雷达只能探测云雨粒子的径向速度、反射率因子等信息,而对于晴空条件下风切变缺乏探测能力[15-16];风廓线雷达只能探测单点的垂直风廓线,探测精度难以满足要求。相较于其他探测设备,多普勒激光测风雷达探测数据的时空分辨率更高,能够满足探测精度的要求,可以反映风切变的小尺度特征[17-19]。
近年来,多普勒激光测风雷达在香港、北京、兰州等地的机场先后安装用于风切变监测和告警业务[20-22]。受激光测风雷达安装位置、扫描模式及机场天气特点等因素影响,跑道及延长线上风场信息提取、风切变计算方法等都是影响风切变告警准确率的关键因素。为此,陆续开展了基于激光测风雷达的风切变告警算法研究。香港机场与香港天文台合作于2005年搭建起国内首个风切变探测告警平台,并设计了独特的下滑道扫描模式。随后,基于上述平台先后提出了利用F因子[23]、涡旋耗散率[24]进行风切变识别的告警算法。2016年,蒋立辉等[25]利用下滑道扫描模式的观测资料,提出单、双斜坡检测方法相结合的风切变告警算法(简称“斜坡检测法”),该算法可以在一定程度上提高风切变的告警准确率。2020年,LI等[26]基于兰州中川机场2016年激光测风雷达试运行期间的观测资料和风切变事件提出了区域散度法(regional divergence algorithm,简称RDA),该算法可以滤除局部径向风波动,并能够实现风切变的快速检测,具有较好的应用前景。
兰州中川国际机场地处青藏高原东北边坡,特殊的地形及气候特点导致风切变频发,是我国风切变多发区域之一。2018年,国内民航空管系统首家风切变实验室落户于甘肃空管分局,标志着兰州机场风切变观测与研究得到了民航业界的关注和重视,其研究具有一定的代表性。2020年7月,WLS400S-AT型激光测风雷达在兰州中川机场正式安装并投入运行,业务所用的IRIS(interactive radar information system)风切变告警算法由芬兰Vaisala公司提供,但算法核心内容和源代码无法获取,不利于机场本地化风切变告警算法的发展和告警业务能力的提升。为进一步提升风切变保障水平,需要推动风切变告警算法国产化进程。因此,本文利用兰州中川机场2020年7—11月激光测风雷达探测资料和飞行员报告的12次风切变事件,探讨评估区域散度法、斜坡检测法两种风切变告警算法的告警能力及应用效果,并与IRIS算法的风切变告警准确率进行对比分析,以期为风切变保障提供更为有效的告警方案。
1 算法简介
1.1 区域散度法
区域散度法的基本思路是基于多个径向拟合风速计算区域散度,用于识别风切变的范围和强度[26]。该算法通过两步完成:一是基于多个径向拟合的逆风廓线重构,二是区域散度值的计算。重构逆风廓线的目的是构建跑道及其延长线上风场。鉴于兰州中川国际机场激光测风雷达和跑道的相对位置,通过拟合该区域N条激光波束上径向风数据来实现,即将相同距离、不同方位的数据点值进行平均,得到跑道及其延长线上的径向风。需要注意的是,在计算过程中需剔除数据中的异值点。剔除方法:将数据值与该数据点所在的2×2窗区平均值进行对比,若差值绝对值大于某一阈值则用窗区平均值代替。完成逆风廓线(U)重构后,沿径向方向逐点计算U上任一数据点i的区域散度值(RDVi),计算公式[26]如下:

(1)
其中:

(2)
式中:UI(m·s-1)为两窗区的区域平均速度;Uk(m·s-1)为逆风廓线在第k个库距处的速度;D和R分别为有效采样数据点之间的距离和窗区长度,均以雷达径向库距的倍数表示,D的取值为偶数,从0开始,可取0、2、4、…,而R的取值为0、1、2、…。当区域散度演变曲线中连续有3个数据点的RDV绝对值超过阈值,即为局部风切变的发生位置,且超过阈值的数值越大,风切变越强;连续超过阈值的点越多,风切变发生的范围越大。本文区域散度法识别风切变时采用7条径向数据重构逆风廓线[26],其中D=4、R=1。
1.2 斜坡检测法
单斜坡检测法通过提取跑道及其延长线上径向速度,并对其进行三点平滑构建逆风廓线U,计算U在斜坡长度△x上的速度变化△V[25],示意图如图1(a),表达式如下:
△V(ps1)=U(p+△x)-U(p)
(3)
式中:p为采样点;ps1为单斜坡中点位置。
实验结果表明,本底计数略有下降。探测效率、探测下限也都处于下降趋势。结合本底计数、效率、吸收液体积和探测下限来看,可以选择配比为9:9。
双斜坡由2个单斜坡构成,对斜坡长度△x上的速度变化分别记为△V1和△V2,2个斜坡之间距离为d[图1(b)和图1(c)],则双斜坡检测的速度变化△V′的表达式如下:
[U(p+2△x+d)-U(p+△x+d)]}
(4)


图1 斜坡检测法示意图
2 观测资料及风切变事件
兰州中川国际机场于2020年7月正式安装了WLS400S-AT型激光测风雷达,用于监测机场低空风切变。该雷达安装于机场跑道北端入口处向内750 m,距离跑道中心线350 m,执行3°仰角的PPI扫描,分辨率200 m,最大探测距离14 km,径向风扫描精度可达0.2 m·s-1,扫描模式和具体参数详见文献[27]。本文收集了自激光测风雷达业务运行开始至2020年11月的观测资料,采用SHUN等[21]的质量控制方法对资料进行预处理。此外,还收集了IRIS算法中风切变告警信息。
在飞机起降阶段,当其遭遇较强风切变时飞行安全会受到影响,因此多数情况下机组及保障部门都会极力避免飞机遭遇风切变,这也造成飞行员报告的风切变事件相较于气象行业发布的降水、雷暴等灾害天气过程明显偏少。据兰州中川机场气候志统计,2004—2020年共计发生风切变事件383次,其中由对流天气、湍流和动量下传造成的分别为249、72次和15次,占风切变事件总数的65.0%、18.8%和3.9%。在2020年7—11月激光测风雷达观测期间,飞行员共报告了12次风切变事件,其发生时间(北京时,下同)和位置等信息如表1所示。据甘肃空管分局气象部门分析,12次风切变事件多由对流活动造成(8次),湍流和动量下传造成的分别为3次和1次,这与2004—2020年发生的383次风切变事件成因分布基本一致。

表1 2020年7—11月飞行员报告的兰州中川机场12次风切变事件信息
3 结果与分析
3.1 告警准确率
根据国际民航组织标准[1],区域散度法和斜坡检测法的风切变告警阈值分别设定为±2.5×10-3s-1和±7.7 m·s-1。利用上述两种算法对12次风切变事件进行识别(表2),对比两种算法的告警准确率及其对不同类型风切变事件的识别能力。从表2看出,对于兰州中川机场的12次风切变事件,区域散度法、斜坡检测法和IRIS算法分别识别出9、6、5次,告警准确率分别为75.0%、50.0%和45.5%,表明区域散度法的告警准确率远高于斜坡检测法和IRIS算法,而斜坡检测法的识别率和IRIS告警算法相当。区域散度法的识别结果与LI等[26]对2016年5—10月激光测风雷达在兰州中川机场试运行期间17次风切变事件的识别结果(区域散度法优于单斜坡检测法和Rainbow5告警算法)一致。
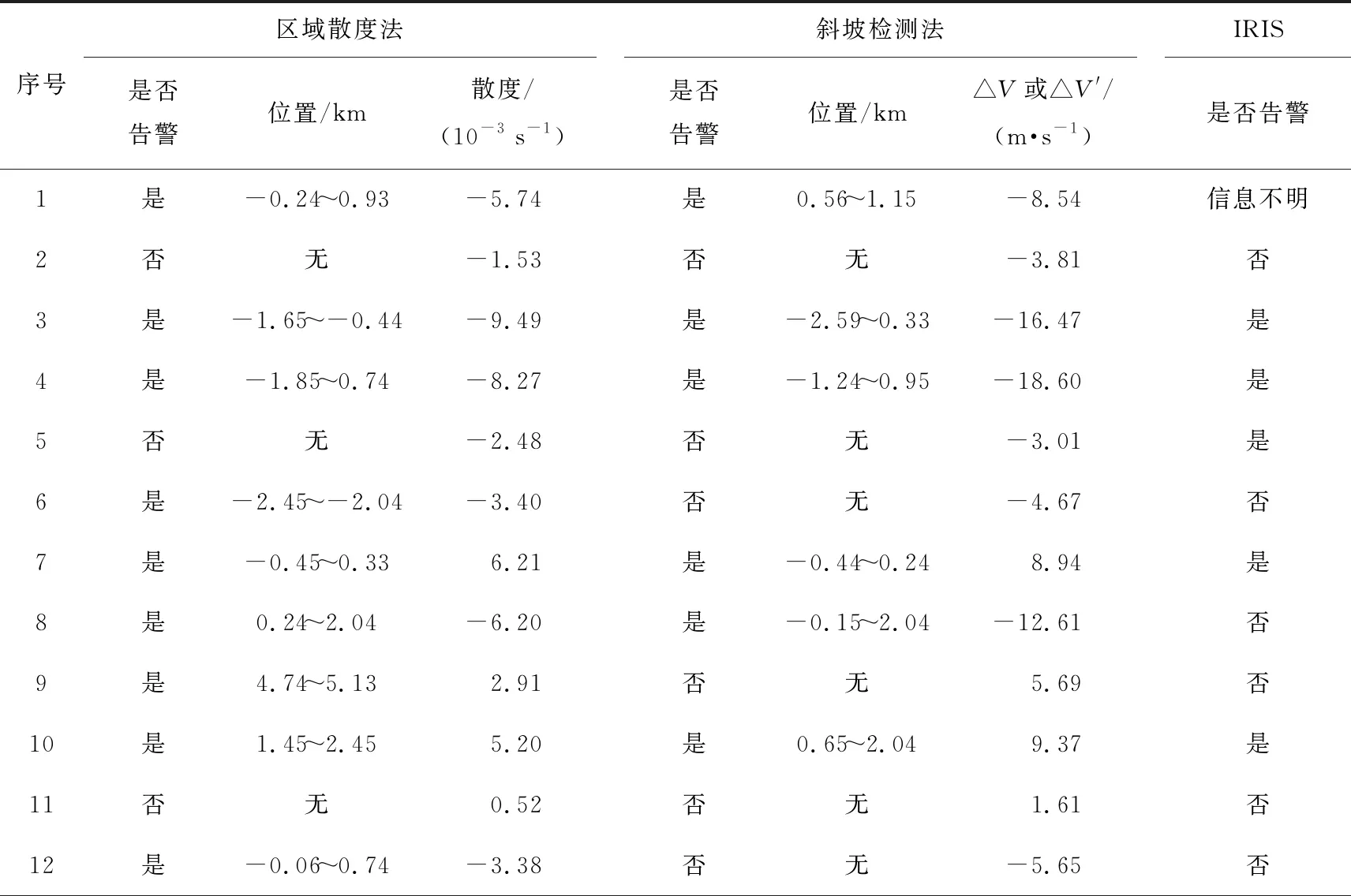
表2 三种风切变告警算法对12次风切变事件的识别信息
进一步对比分析两种算法的告警位置(表2)与机组实际报告遭遇风切变位置(表1),发现区域散度法成功告警的9次风切变事件中,除6号事件实际报告位置信息不明外,其余事件均有明确的位置信息,且6次事件(1、7、8、9、10、12号)告警位置和实际记录具有一致性,而3号和4号事件的告警位置和实际位置差异较大;在斜坡检测法成功告警的6次风切变事件中,有4次事件(1、7、8、10号)的告警位置和实际记录较为一致,而3号和4号事件的告警位置和实际记录差异也较大。分析发现,位置差异较大的原因主要来自两方面:一方面,2次风切变事件均发生在对流性降水天气背景下,降水、大雾等天气会导致激光测风雷达发射的波束随距离增大而迅速衰减,数据质量明显下降,对于较远位置出现的风切变不能准确识别;另一方面,受飞行程序影响,当飞机在进场过程中遭遇风切变时,机组会选择及时改出,即脱离原有下滑道、进行复飞等操作,因此机组报告的是最先遭遇风切变的位置,而两种算法给出的是在可靠数据范围内(跑道及有限延长线距离内)的最强风切变位置。
结合风切变出现时的天气实况,发现两种算法和IRIS算法均对于对流天气造成的风切变有较好的告警能力,而对于湍流造成的风切变告警能力较弱。对流天气常会引起近地层风场显著变化,这在激光测风雷达探测的径向风场中有明显体现。湍流型风切变主要表现为垂直风的变化,而目前兰州中川国际机场的激光测风雷达采用的扫描方式缺乏对垂直风的探测,因此对于湍流造成的风切变告警能力较弱。
3.2 风切变事件典型个例分析
为更好地理解两种算法对于对流活动、动量下传和湍流背景下风切变的告警能力,选取3次不同成因下的风切变事件(8、12、2号)进行详细分析,其中区域散度法的识别结果分别为命中、命中、漏报,斜坡检测法表现为命中、漏报、漏报。
3.2.1 对流型风切变
2020年8月9日13:52,某航班在距离北跑道末端1.8 km处遭遇风切变并中止进近,此次风切变事件(8号)发生在一次对流活动背景下,区域散度法和斜坡检测法均成功发布告警。 机场气象观测记录显示,风切变事件发生前后机场北侧有对流云生成并向南移动。从风切变发生前后5 min及发生时的激光测风雷达径向速度PPI图(图2)看出,径向速度大值区有南压的过程。事件发生前5 min[图2(a)],零速度线存在明显折角,雷达处于西北偏北气流与偏西气流交汇处,风向切变明显,且雷达西北偏北方向5 km处存在径向速度大值区,其值在17~20 m·s-1之间。事件发生时[图2(b)],速度大值区进一步南压,雷达北侧径向风切变明显,且流入区面积明显大于流出区面积,表明低层风场出现辐合,迫使局地垂直上升运动产生。因此,飞机下降过程中会同时受到径向风切变及垂直气流的影响。事件发生后5 min[图2(c)],径向速度大值区前沿移至雷达南侧3 km处,完全覆盖跑道。

图2 2020年8月9日13:47(a)、13:52(b)、13:57(c)雷达径向速度PPI图(单位:m·s-1)
事件发生时径向速度及两种算法重构的逆风廓线(图3)显示,径向速度绝对值在距雷达原点1~2.8 km范围内呈显著增大趋势,最大值为18.7 m·s-1,且径向风沿跑道方向存在明显梯度,约6.7 m·s-1·km-1;斜坡检测法和区域散度法重构的逆风廓线均能够反映出明显的径向风梯度,其值分别为5.7、5.3 m·s-1·km-1。另外,斜坡检测法重构的逆风廓线斜率大于区域散度法,且前者重构后的最大径向速度值更接近于跑道及其延长线上原始最大径向速度,可达17.7 m·s-1,而后者重构后的最大径向速度为16.4 m·s-1,主要原因是逆风廓线的重构过程中,斜坡检测法使用的是跑道及其延长线上的单一径向观测数据,而区域散度法使用了多个径向数据。
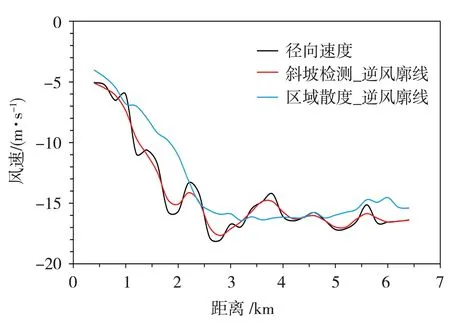
图3 2020年8月9日13:52雷达观测的径向速度及两种算法重构的逆风廓线
基于重构的逆风廓线,区域散度法和斜坡检测法计算得到的风切变告警位置分别在距离跑道末端0.24~2.04 km和-0.15~2.04 km处(图4),最大值分别为-6.2×10-3s-1和-12.61 m·s-1。对比飞行员报告的风切变发生位置(距离跑道末端1.8km处),两种算法的告警位置都准确。进一步分析发现,两种算法的告警识别曲线存在显著不同,区域散度法的告警识别曲线走向和坡度与径向速度的变化趋势一致,且散度的显著变化出现在径向速度发生明显变化之前,表现为位相上的提前量,而斜坡检测法中不同坡长的识别结果有所差异,小波动较多,与径向速度剧烈变化相对应的趋势不如区域散度法明显。
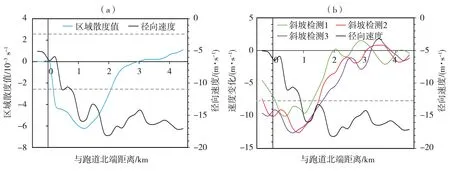
图4 2020年8月9日13:52雷达观测的径向速度及两种算法的风切变识别结果
3.2.2 动量下传型风切变
2020年11月17日14:41,某航班在南跑道末端遭遇风切变(12号)复飞,此次风切变事件出现在机场上空动量下传的天气背景下,事件发生前后5 min径向速度无明显变化(图5),机场上空存在一条东北—西南向的大风带,中心风速达14.5 m·s-1,两侧径向风的水平切变明显。
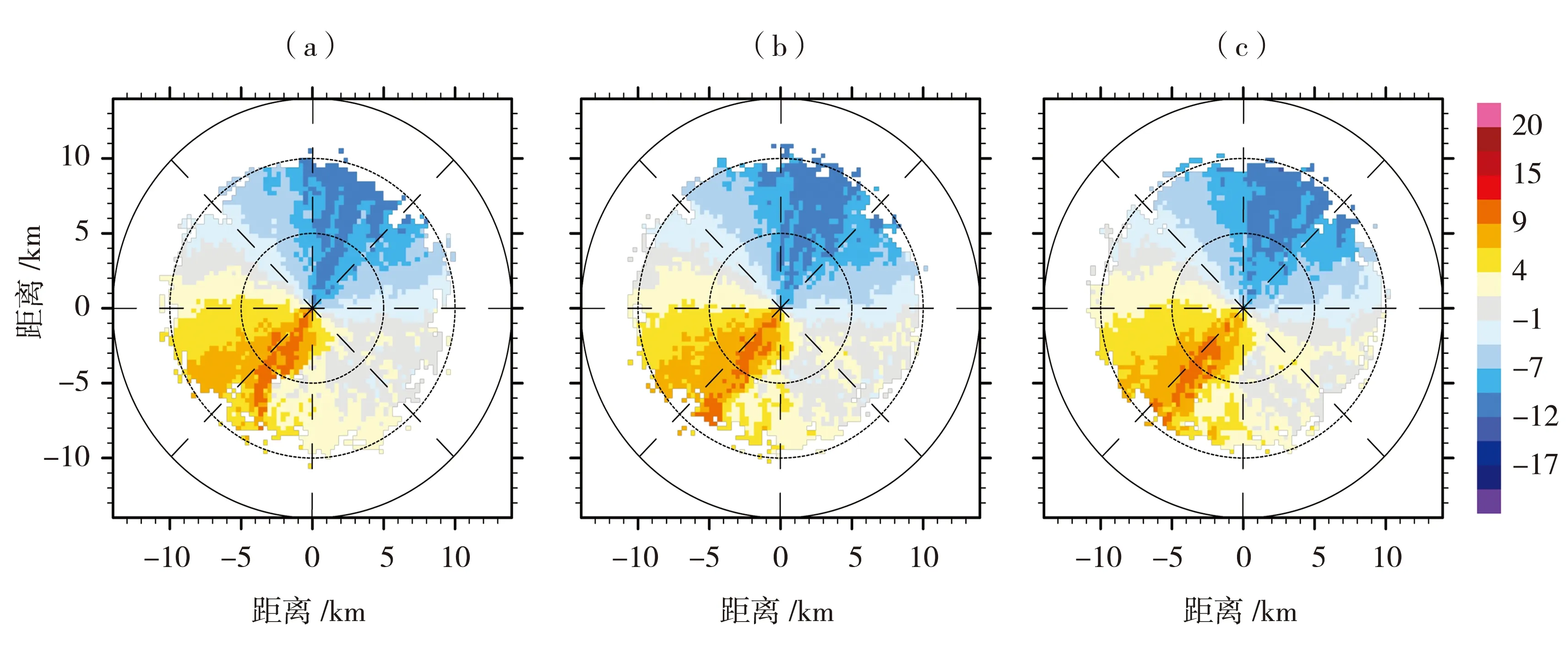
图5 2020年11月17日14:36(a)、14:41(b)和14:46(c)雷达径向速度PPI图(单位:m·s-1)
对比事件发生时跑道及其延长线上径向速度及两种算法重构的逆风廓线(图6),发现径向速度在距雷达3~4 km范围内出现明显梯度(6.2 m·s-1·km-1),表明跑道及其延长线周围径向风存在显著的径向和法向切变。告警结果(图7)显示,区域散度法的告警识别曲线在径向速度变化前便开始出现显著变化,并在距离跑道末端-0.06~0.74 km区域范围超过阈值(±2.5×10-3s-1),最大值为-3.38×10-3s-1,其告警位置与风切变实际出现位置相吻合;斜坡检测法中,告警识别曲线虽然也出现了较为明显的变化,最大值为-5.65 m·s-1,但未达到告警阈值(7.7 m·s-1)。可见,两种算法对动量下传型风切变的识别能力存在差异。
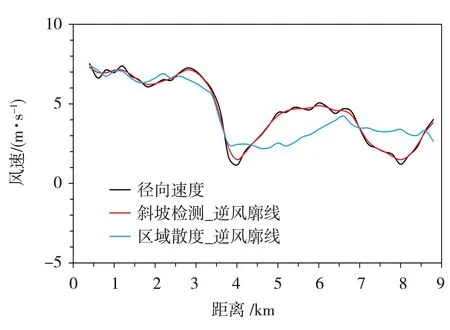
图6 2020年11月17日14:41雷达观测的径向速度及两种算法重构的逆风廓线
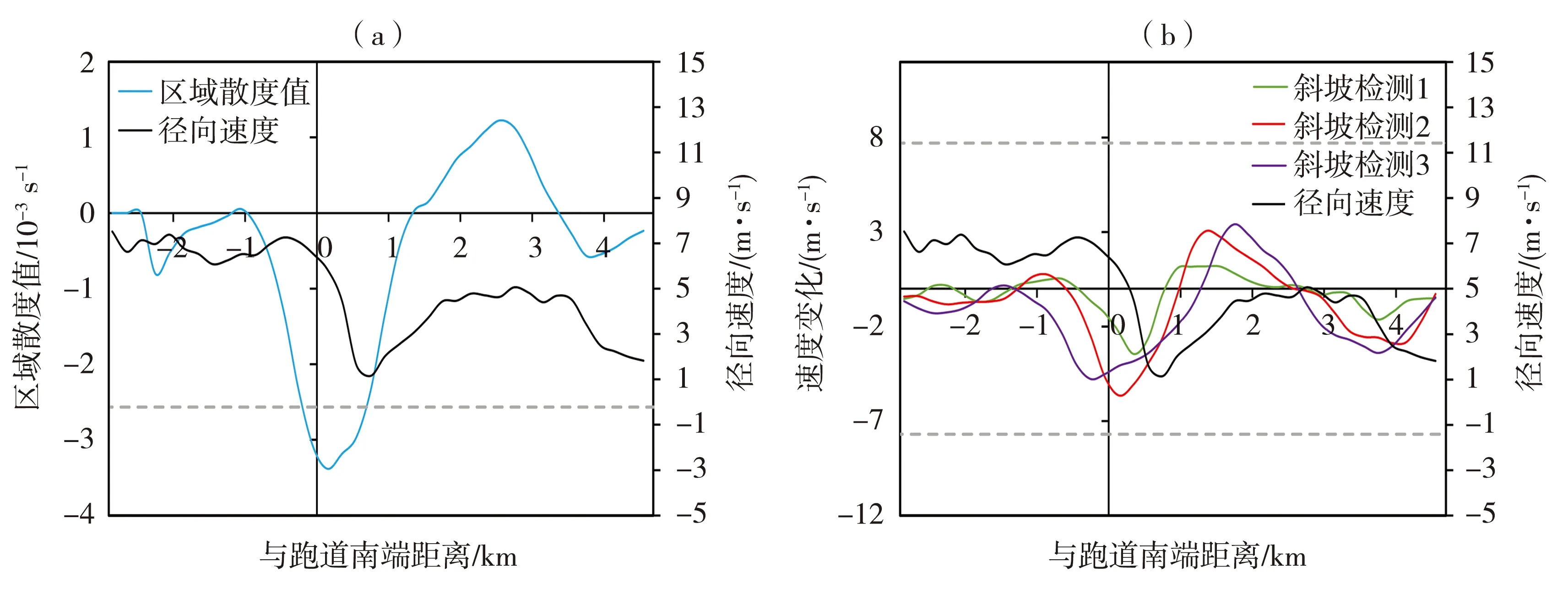
图7 2020年11月17日14:41雷达观测的径向速度和两种算法的风切变识别结果
综合分析上述2次风切变事件可知,区域散度法告警识别曲线的散度变化在位相上先于径向速度的变化,这种位相提前量在径向风显著变化时更为明显,可为风切变的提前告警提供一定思路。出现位相提前量的主要原因是:在逆风廓线重构过程中,区域散度法采用了跑道及其延长线附近7个径向的观测数据,一定程度上包含了跑道及延长线区域风场的时空演变信息,将跑道及延长线邻近时域的风场信息传递到逆风廓线的重构中,从而表现出位相上的提前。正因如此,相较于斜坡检测法的径向三点平滑方法,区域散度法重构的逆风廓线较为光滑,波动细节较少。然而,斜坡检测法重构的逆风廓线虽能够体现出更多的波动细节,但告警识别结果易受到小波动的影响,导致告警效果较区域散度法差。
3.2.3 湍流型风切变
2020年7月17日10:48,某航班报告在北跑道末端因气流不稳复飞,是湍流背景下发生的一次风切变事件(2号)。事件发生前后5 min径向速度PPI图(图8)上均呈蜂窝状,零速度线较模糊,整体风向表现为较弱的西南风,探测范围内最大径向速度为3.7 m·s-1,在正(负)速度区存在局地负(正)速度,低层风场较为混乱。
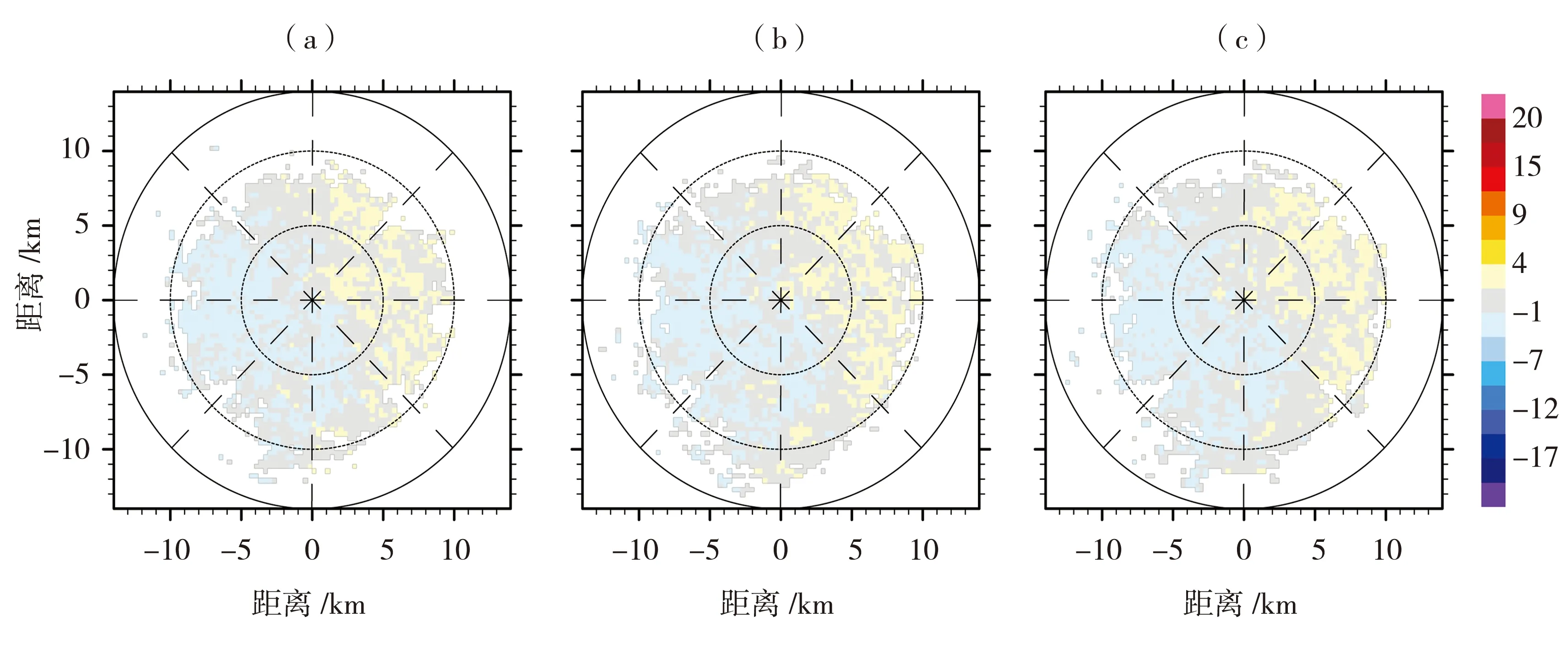
图8 2020年7月17日10:43(a)、10:48(b)、10:53(c)雷达径向速度PPI图(单位:m·s-1)
该事件发生时跑道及延长线上的径向速度波动明显,其值在3 m·s-1以下且出现正负速度交替现象(图9)。两种算法的告警结果(图10)显示,区域散度法的最大散度值为-1.53×10-3s-1,斜坡检测法的速度变化(△V或△V′)值最大为-3.81 m·s-1,均未达到阈值,但是区域散度法的告警识别曲线的波动较斜坡检测法更为明显,这一特征与8号和12号风切变事件中区域散度法对风切变响应程度更高是一致的。在8号和12号事件中,雷达观测的径向风场动力特征显著,而湍流型风切变多发生在近地层水平风速较小、垂直风变化较大的背景下,目前激光测风雷达采用的扫描模式难以探测到垂直风的变化。考虑到近地层湍流运动的特点,可以通过改变激光测风雷达的扫描模式来实现垂直气流的探测,并调整湍流背景下风切变告警阈值来达到此类型风切变告警。
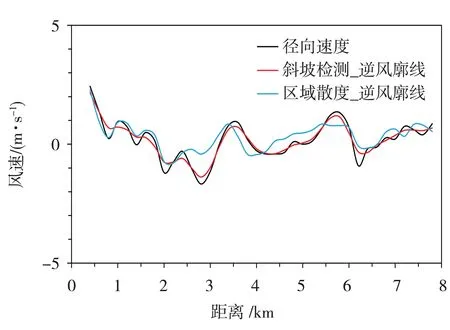
图9 2020年7月17日10:48雷达观测的径向速度及两种算法重构的逆风廓线

图10 2020年7月17日10:48雷达观测的径向速度和两种算法的风切变识别结果
综上分析可见,对流型和动量下传型风切变出现时风场变化较大,区域散度法有较好的识别能力,而斜坡检测法则表现出一定的识别能力;湍流型风切变主要表现为垂直风的变化,在3°仰角径向风速PPI图上难以体现这一特征,因此两种算法均很难有效识别湍流型风切变信息。
4 结 论
(1)区域散度法、斜坡检测法和IRIS算法对于对流天气、动量下传天气背景下的风切变均具有较好的识别告警能力,但对于湍流背景下的风切变告警能力较弱。
(2)区域散度和斜坡检测两种算法重构的逆风廓线表现出一定的差异性,区域散度法因采用多个径向观测数据重构逆风廓线,其廓线较为光滑,而斜坡检测法采用单径向观测数据进行逆风廓线重构,较大程度地保留了风场的波动特性。
(3)区域散度法对于水平风场变化显著的风切变的告警具有一定的位相提前量,其主要原因在于逆风廓线重构方案综合了多个径向的观测,能够体现跑道及延长线上风场的时空变化信息,具有一定的提前告警意义。
(4)区域散度法对风切变事件的告警效果优于斜坡检测法和雷达自用的IRIS算法。
鉴于机组及保障部门都会极力避免飞机遭遇风切变,因此在激光测风雷达落地兰州中川机场以来收集到的风切变个例有限,本文仅得到了区域散度法的告警准确率较高这一定性结论,而定量的告警准确率仍需要大量的风切变事件样本来确定。此外,算法中的参数均借鉴了已有研究成果,没有针对兰州中川机场资料进行更多的尝试,对于风切变阈值的设定以及如何识别和告警湍流背景下风切变事件等还需要进一步深入研究。
猜你喜欢
数学年刊A辑(中文版)(2022年1期)2022-08-20
高原山地气象研究(2020年3期)2020-07-16
数学物理学报(2019年6期)2020-01-13
数学物理学报(2018年3期)2018-07-17
航空兵器(2017年6期)2018-01-24
成都信息工程大学学报(2017年3期)2017-11-09
装甲兵工程学院学报(2017年3期)2017-07-05
农业与技术(2016年24期)2017-04-20
光学精密工程(2016年6期)2016-11-07
成都信息工程大学学报(2016年6期)2016-06-01
