履带车辆滑转滑移场相关特征分析
2021-09-14 02:42:26欧阳长永金鑫葛新章陈欢
内燃机与配件 2021年17期
关键词:特征分析
欧阳长永 金鑫 葛新章 陈欢
摘要: 履带车辆匀速转向的计算方法,与已知著作中阐述过的方法不同,在这种计算方法中,考虑了转向机构辅助驱动装置中和履带推进器中的动力和空转损失,以及使用了车辆转向牵引特性综合分析方法。此方法广泛应用于安装机械式传动装置和液力机械式传动装置的履带车辆上,不论安装的是任何类型的转向机构(但不包括在液力机械传动装置中有直接来自发动机的机械式驱动装置,和在转向工况工作时有解除闭锁的液力变矩器参与的双功率流转向机构)。
Abstract: The calculation method of uniform steering of military tracked vehicles is different from the method described in known works. In this method, the power and idling losses in the auxiliary drive of steering mechanism and the tracked propeller are considered, and the comprehensive analysis method of vehicle steering and traction characteristics is used. This method is widely used in a mechanical transmission device and hydraulic mechanical transmission of military tracked vehicle, no matter any type of installation is steering (but is not included in the hydraulic mechanical transmission device is directly from the engine in mechanical drive device, and working condition in turn to work with the closure of hydraulic torque converter of the double power flow to the agency).
关键词: 履带车辆;滑转;滑移;特征分析
Key words: track-laying vehicle;track slip;slippage;characteristics analysis
中图分类号:U469.6+94 文献标识码:A 文章编号:1674-957X(2021)17-0064-02
1 履带车辆直线行驶牵引计算
当对有液力机械式传动装置的履带车辆进行直线行驶牵引计算时,要考虑液力变矩器的性能,具有下列特点:①液力变矩器工作时,在履带车辆发动机和主动轮之间无刚性的运动联系,传动装置的运动学传动比不仅由机械式部件决定,还由液力变矩器的传动比决定。②液力变矩器的运动学传动比,应与绘制履带车辆牵引特性时确定的发动机工况相对应。③液力机械式传动装置是一种在较少情况下具有两自由度的系统,当分析履带车辆加速时应考虑这点。④液力机械式传动装置的动力学传动比与运动学传动比差别很大,并且在每种工况下不仅由机械部件决定,而且还取决于液力交矩器的动力学传动比。⑤当决定变速箱的速度范围和划分排挡时,应考虑液力变矩器的闭锁。液力变矩器在全部拍1挡或在高挡自动闭锁的液力机械式传动装置(如TX-411,TX-100等)使用较广泛;还有的使用方法是,这种液力机械式传动装置的液力变矩器仅在原地起步和换挡时使用,而在直线行驶工况中经常处于闭锁工况,如4HP-250液力机械式传动装置。
2 转向牵引计算的方法
进行履带车辆的转向牵引計算时,应分析研究各行驶条件下的运动参数和转向外部阻力,还要根据转向半径和行驶速度,考虑各种型式转向机构的性能。
2.1 计算过程中解决的任务 计算时综合处理方法解决下列任务:①评价以任何给定转向半径在一定地面(土壤)上转向的能力,以及确定履带车辆于转向工况在能转向的那些排挡上转向时的最大可能的行驶速度。②计算表明最大转向阻力系数μmax和直线行驶阻力系数f的地面集合(集合体),在这些地面上,当进入转向的车速固定时,能够以任何给定的转向半径转向。③对于每个排挡,确定履带车辆童心直线运动速度范围和转向机构保证的在实际转向半径下的速度范围,以及考虑到由离心力引起的侧滑限制时以给定半径转向时的排挡速度范围的利用程度。
2.2 计算过程中假设的条件 计算时利用下列假设:①履带车辆的童心位于两履带接地段中间上方的纵向平面内。②履带的宽度等于零。③两履带接地段上切向反作用力的横向分量正比于这些接地表面上的垂直负荷。④履带车辆的转向在水平的平坦场地上进行。
2.3 计算时综合分析处理 转向机构的类型通常用在转向时保持着转向前直线行驶速度的点的位置表示,其位置用与履带中心距的比值表示。转向机构的参数缸,即高速履带(向前行驶)纵向对称中心线到在转向时保持着直线行驶速度点的相对距离。如果上述有代表性点的相对距离,由履带车辆的纵向对称中心线起来度量的话,则转向机构参数用qo表示。根据排挡号,相对规定转向半径(当转向机构离合器完全结合时)为:ρp=0.5[(iTP1+iTP2)/(iTP1-iTP2)+1]。式中:iTP1,iTP2为当履带车辆转向时发动机(或液力变矩器涡轮)至主动轮的(下标2为高速前侧,下标1为低速侧)传动比(不计效率)。此时,对差速式汇流行星排齿圈的驱动,通常由发动机通过变速箱实现,而对太阳齿轮不经过变速箱,而是通过转向分路辅助机构驱动。当直线行驶时,太阳齿轮不转或者以同样的速度旋转,当转向时太阳齿轮的旋转速度根据相互间的比值而变化。
对于双功率流的转向机构,其相对规定转向半径为:
ρp=apKciΠ/ik+bp+0.5
式中:ap,bp为转向机构类型和组别的系数;Kc为差速式汇流排结构参数。
至车辆重心的相对规定转向半径为:ρap=Ro/B=ρp-0.5
当履带车辆转向时,离合器或转向机构的能力,以离合器部件的储备系数(一般大于1.0),以及机械式驱动装置各齿轮和各轴的强度储备系数(大于1.0)来确定。所以,在有发动机功率储备的情况下,与计算的相比,当增大转向阻力矩时履带车辆是可以转向的。如果液压马达是不可调节的,此阻力矩受工作液体的最大压力限制并由调整安全阀来确定。于是,有静液传动的转向机构的履带车辆,甚至在拥有发动机功率储备的情况下,当安全阀打开时也不能实现规定转向半径的转向,因为这时履带车辆会任意增大转向半径。基于这一理由,当计算有静液传动的转向机构时,增大阻力矩,即加大系数Umax是适合的。
当履带车辆以等于或大于被制动履带的半径转向时,实际相对转向半径为:ρ'=KR·ρ
当设计新的履带车辆时,可使用任何安装相同行動部分和具有相同重量的、已知履带车辆的实验KR系数值,或者采用KR=L/B。上述最后的关系式可使用的原因,是因为许多研究在较低速度和较小半径区间转向的研究者均得到过上述关系式。根据国外列出的数据,当在较大速度和较大半径区间转向时,在离心力的作用下系数KR会增大并逐渐大于比值L/B。由直线行驶牵引计算的结果中,对每个排挡选取履带车辆重心在进入转向时刻的直线行驶速度(vo)值,和与速度相应的地西单位牵引力值f。制成这样的表格,此表格中不仅包括这些数值的变化值,还包括与最大功率、最大扭矩和怠转工况的发动机转速相应的有代表性的数值。
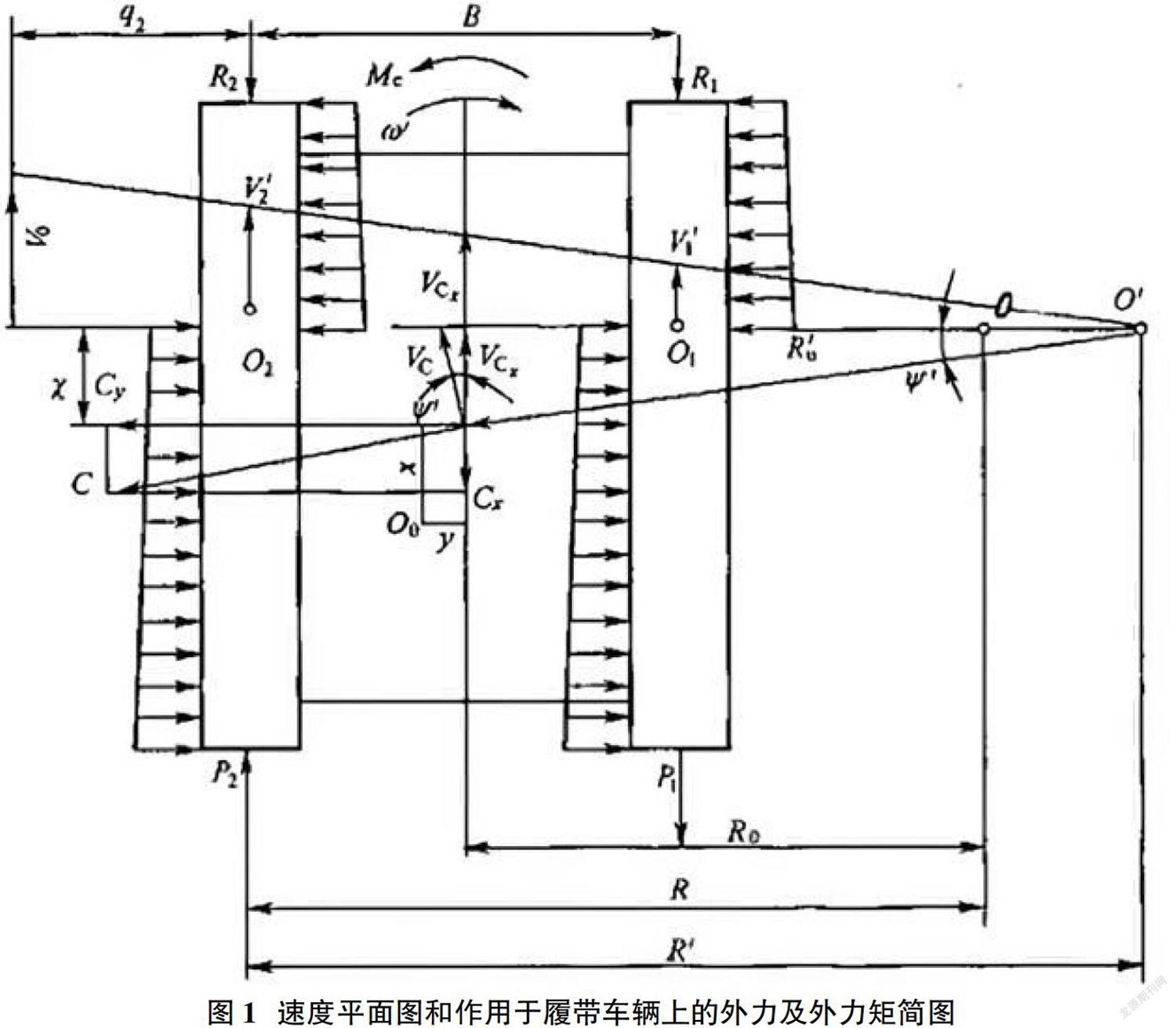
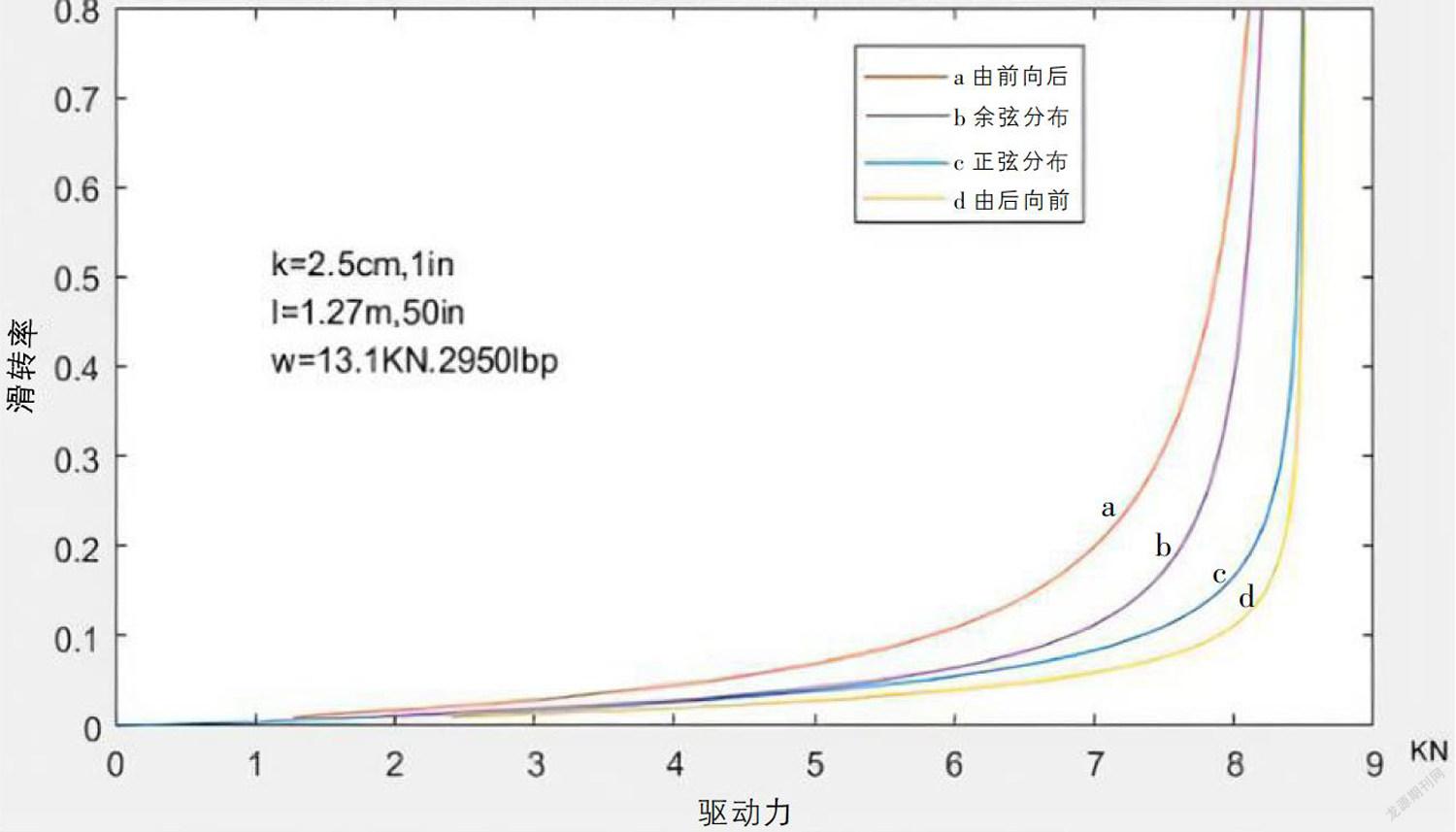
3 履带驱动力分析
履带的驱动力和滑转率理想状态下,可预测具有均匀法向压力分布的履带牵引力,实际上,法向压力分布很少是均匀的。分析不同类型压力分布的履带,计算其产生的驱动力。a线表示法向压力由前向后线性增加时,在摩擦型土壤中履带所产生的驱动力。b线表示法向压力呈余弦曲线分布时,在摩擦型土壤中履带所产生的驱动力。
c线表示法向压力呈正弦曲线分布,最大压力在中点,且前、后端压力为零时,在摩擦型土壤中履带所产生的驱动力。d线表示法向压力由后向前线性增加时,在摩擦型土壤中履带所产生的驱动力。根据图中显示出来的变化情况,可见法向压力分布分布对于驱动力确实有明显影响,特别是在低滑转率的情况下。均匀法向压力分布情况,研究理想状态下的履带整体运动,现实生活中,车辆运动时,履带与履带之间存在间隙,间隙约为5毫米,计算理想状态下和实际中每块履带板承受的驱动力和履带板叠加后所受的驱动力。前面几块履带版所受驱动力较小,但是考虑间隙后,所受驱动力略大于理想状态。履带板叠加后,考虑间隙时,驱动力较大。得出结论,履带小间隙问题,对履带的影响较小。
参考文献:
[1]王红岩,芮强,高连华,沙学锋等译.履带车辆传动装置[J].北京:国防工业出版社,2014.
[2]黄祖勇,著贾振中,李升波,胡晓松译.地面车辆原理[J].北京:机械工业出版社,2018.
[3]郭晓林,王涛,刘杰,等.装甲车辆行驶理论[J].北京:国防工业出版社,2017.
[4]李军魁.履带车辆稳态转向性能分析与试验[J].北京:国防工业出版社,2002.
[5]阎清东,张连第,等.履带车辆构造与设计[J].北京:北京理工大学出版社,2007.
[6]陈淑艳.移动机器人履带行走装置的构型与机动性能研究[J].2008.
猜你喜欢
成都信息工程大学学报(2021年1期)2021-07-22 07:21:54
世界最新医学信息文摘(2021年12期)2021-06-09 08:37:22
河北画报(2021年2期)2021-05-25 02:07:06
环境影响评价(2020年5期)2020-12-02 01:18:48
成都信息工程大学学报(2019年4期)2019-11-04 00:56:20
成都信息工程大学学报(2017年3期)2017-11-09 02:56:41
高原山地气象研究(2016年1期)2016-11-10 06:06:07
高原山地气象研究(2016年3期)2016-02-28 13:53:16
中国医学影像学杂志(2015年9期)2015-12-15 11:03:26
中国当代医药(2015年8期)2015-03-01 02:01:52