基于RBF神经网络的滚仰式导引头自适应滑模变结构控制
2021-09-14 02:32姚亚鹏
河南科技 2021年11期
姚亚鹏

摘 要:滚仰式导引头系统具有非线性和不确定性。本文结合导引头稳定平台的机械结构特性,通过坐标系变换对其运动学特性进行分析,基于欧拉动力学原理建立了平台的动力学模型,同时考虑到工程应用中建模不确定性和摩擦力矩、电机力矩、耦合力矩、干扰力矩等多种非线性因素对系统性能的影响,提出了一种基于RBF(径向基)神经网络的滑模变结构控制器设计方案。仿真结果表明,采用神经网络可实现模型中未知部分的自适应逼近,调节自适应权重可保证整个系统的稳定性和收敛性,有效抵抗干扰等非线性因素的影响。
关键词:滚仰式导引头;建模;滑模控制;神经网络
中图分类号:TP242文献标识码:A文章编号:1003-5168(2021)11-0011-03
Adaptive Sliding Mode Variable Structure Control of Roll-pitch
Seeker Based on RBF Neural Network
YAO Yapeng
(China Airborne Missile Academy,Luoyang Henan 471009)
Abstract: The roll-pitch seeker system has nonlinearity and uncertainty. In this paper, combined with the mechanical structure characteristics of the seeker stabilized platform, its kinematics characteristics were analyzed through coordinate system transformation, and a dynamic model of the platform was established based on the Euler dynamics principle, at the same time, considering the uncertainty of modeling in engineering applications and the influence of various non-linear factors such as friction torque, motor torque, coupling torque, and disturbance torque on the system performance, a design scheme of sliding mode variable structure controller based on RBF (radial basis function) neural network was proposed. The simulation results show that the use of neural network can realize the adaptive approximation of the unknown part of the model, and adjusting the adaptive weight can ensure the stability and convergence of the entire system, and effectively resist the influence of non-linear factors such as interference.
Keywords: roll-pitch seeker;modeling;sliding mode control;neural network
以往冲突和空战分析结果表明,空战遭遇中是否配有高性能的近距空空导弹直接关系到近距空战主动权的夺取[1],近距格斗空空导弹在空战中的重要性不言而喻。现代空战要求新一代近距格斗空空导弹具备更高的机动性和大离轴角发射能力,要求导引头视场大、体积小、重量轻等。大离轴角发射要求导引头具有较大的视场,以便进行目标探测,滚仰式导引头可实现前半球全向攻击[2-5],是当前近距格斗空空导弹的首要选择。
在导弹飞行过程中,受弹体扰动和温度、气压、震动等不确定因素的影响,滚仰式导引头稳定平台系统的某些结构参数会发生变化,继而影响系统稳定性。滑模变结构控制作为变结构控制系统的一种控制策略,可迫使系统在一定特性下沿规定的状态轨迹做小幅度、高频率的上下运动(滑动模态)。滑动模态可以进行设计且与系统参数及扰动无关,因此,其具有快速响应、对应参数变化及扰动不灵敏、无须系统在线辨识、物理实现简单等优点。本文结合滑模控制和神经网络逼近进行滚仰式导引头非线性系统的设计,采用神经网络实现模型中未知部分的自适应逼近,有效降低模糊增益。同时,使用李雅普诺夫方法导出神经网络自适应率,通过调节自适应权重来保证整个闭环系统的稳定性和收敛性。
1 滚仰式导引头稳定跟踪原理
1.1 坐标系定义
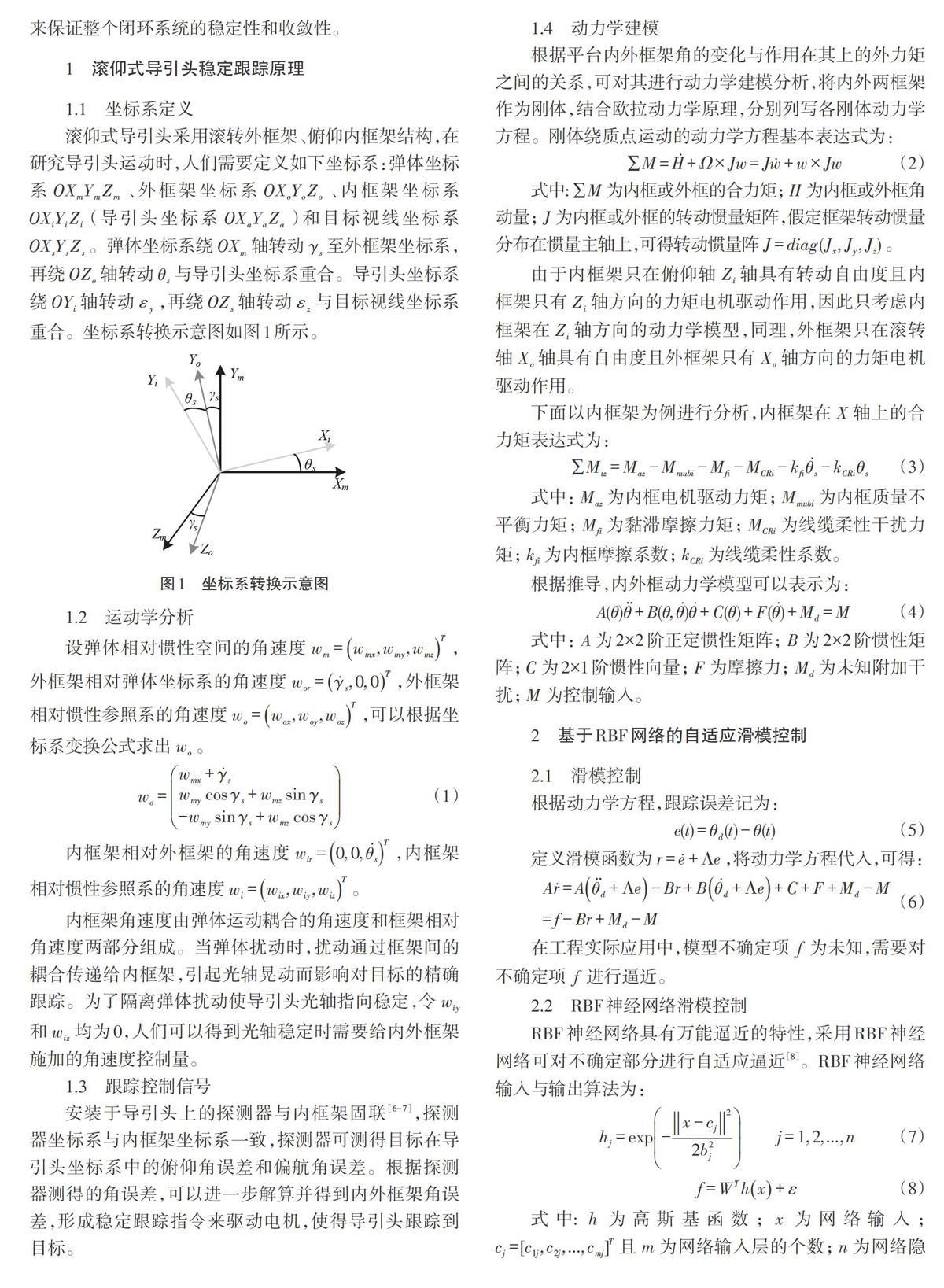
滚仰式导引头采用滚转外框架、俯仰内框架结构,在研究导引头运动时,人们需要定义如下坐标系:弹体坐标系[OXmYmZm]、外框架坐标系[OXoYoZo]、内框架坐标系[OXiYiZi](导引头坐标系[OXaYaZa])和目标视线坐标系[OXsYsZs]。弹体坐标系绕[OXm]轴转动[γs]至外框架坐标系,再绕[OZo]轴转动[θs]与导引头坐标系重合。导引头坐标系绕[OYi]轴转动[εy],再绕[OZs]轴转动[εz]与目标视线坐标系重合。坐标系转换示意图如图1所示。
1.2 运动学分析
设弹体相对慣性空间的角速度[wm=wmx,wmy,wmzT],外框架相对弹体坐标系的角速度[wor=γs,0,0T],外框架相对惯性参照系的角速度[wo=wox,woy,wozT],可以根据坐标系变换公式求出[wo]。
[wo=wmx+γswmycosγs+wmzsinγs-wmysinγs+wmzcosγs] (1)
內框架相对外框架的角速度[wir=0,0,θsT],内框架相对惯性参照系的角速度[wi=wix,wiy,wizT]。
内框架角速度由弹体运动耦合的角速度和框架相对角速度两部分组成。当弹体扰动时,扰动通过框架间的耦合传递给内框架,引起光轴晃动而影响对目标的精确跟踪。为了隔离弹体扰动使导引头光轴指向稳定,令[wiy]和[wiz]均为0,人们可以得到光轴稳定时需要给内外框架施加的角速度控制量。
1.3 跟踪控制信号
安装于导引头上的探测器与内框架固联[6-7],探测器坐标系与内框架坐标系一致,探测器可测得目标在导引头坐标系中的俯仰角误差和偏航角误差。根据探测器测得的角误差,可以进一步解算并得到内外框架角误差,形成稳定跟踪指令来驱动电机,使得导引头跟踪到目标。
1.4 动力学建模
根据平台内外框架角的变化与作用在其上的外力矩之间的关系,可对其进行动力学建模分析,将内外两框架作为刚体,结合欧拉动力学原理,分别列写各刚体动力学方程。刚体绕质点运动的动力学方程基本表达式为:
[∑M=H+Ω×Jw=Jw+w×Jw] (2)
式中:[∑M]为内框或外框的合力矩;[H]为内框或外框角动量;[J]为内框或外框的转动惯量矩阵,假定框架转动惯量分布在惯量主轴上,可得转动惯量阵[J=diag(Jx,Jy,Jz)]。
由于内框架只在俯仰轴[Zi]轴具有转动自由度且内框架只有[Zi]轴方向的力矩电机驱动作用,因此只考虑内框架在[Zi]轴方向的动力学模型,同理,外框架只在滚转轴[Xo]轴具有自由度且外框架只有[Xo]轴方向的力矩电机驱动作用。
下面以内框架为例进行分析,内框架在[X]轴上的合力矩表达式为:
[∑Miz=Maz-Mmubi-Mfi-MCRi-kfiθs-kCRiθs] (3)
式中:[Maz]为内框电机驱动力矩;[Mmubi]为内框质量不平衡力矩;[Mfi]为黏滞摩擦力矩;[MCRi]为线缆柔性干扰力矩;[kfi]为内框摩擦系数;[kCRi]为线缆柔性系数。
根据推导,内外框动力学模型可以表示为:
[A(θ)θ+B(θ,θ)θ+C(θ)+F(θ)+Md=M] (4)
式中:[A]为2×2阶正定惯性矩阵;[B]为2×2阶惯性矩阵;[C]为2×1阶惯性向量;[F]为摩擦力;[Md]为未知附加干扰;[M]为控制输入。
2 基于RBF网络的自适应滑模控制
2.1 滑模控制
根据动力学方程,跟踪误差记为:
[e(t)=θd(t)-θ(t)] (5)
定义滑模函数为[r=e+Λe],将动力学方程代入,可得:
[Ar=Aθd+Λe-Br+Bθd+Λe+C+F+Md-M=f-Br+Md-M] (6)
在工程实际应用中,模型不确定项[f]为未知,需要对不确定项[f]进行逼近。
2.2 RBF神经网络滑模控制
RBF神经网络具有万能逼近的特性,采用RBF神经网络可对不确定部分进行自适应逼近[8]。RBF神经网络输入与输出算法为:
[hj=exp-x-cj22b2jj=1,2,...,n] (7)
[f=WThx+ε] (8)
式中:[h]为高斯基函数;[x]为网络输入;[cj=[c1j,c2j,...,cmj]T]且[m]为网络输入层的个数;[n]为网络隐含层的个数;[W]为网络的理想权值;[ε]为理想神经网络逼近[f]的误差。
采用RBF神经网络逼近[f],根据[f(x)]的表达式,网络输入取[x=[eeqdqdqd]T]。网络输出记为:
[f=Wh(x)] (9)
式中,[W]为RBF网络估计权值。
设计控制律为:
[M=f+Kvr-v] (10)
式中,[v]用于克服网络逼近误差[ε]和[Md]的鲁棒项,其表达式为:
[v=-(εN+bd)×sign(r)] (11)
神经网络自适应律取
[W=FhrT] (12)
定义李雅普诺夫函数为:
[L=12rTAr+12tr(WTF-1W)] (13)
对式(13)进行求导,有
[L=rTAr+12rTAr+tr(WTF-1W)] (14)
由于
[rT(ε+Md+v)=rT(ε+Md)+rTv=rT(ε+Md)-r(εN+bd)≤0] (15)
则有
[L=-rTKvr+rT(ε+Md+v)≤-rTKvr≤0] (16)
当[L]=0时,[r]=0,根据Lasalle不变性定理,闭环系统渐近稳定,[t]趋于无穷时,[r]趋于0,继而误差[e]趋于0。
3 仿真分析
结合上述分析,本研究在MATLAB/Simulink环境下搭建仿真模型,在仿真中考虑建模误差和干扰误差等对系统性能的影响,以验证本文所提方法的有效性。
某滚仰式导引头样机平台的数据参数如下:内框转动惯量[Ji]为0.049 (N·m·s2)/rad,外框转动惯量[Jo]为0.294 (N·m·s2)/rad,摩擦系数和柔性系数的数值为0.008。
RBF神经网络初始权值取零,两个框架的角度指令分别取正弦函数0.1sin[t],控制律和自适应律按照上述推导进行设计,仿真结果如图2和图3所示。
由仿真结果可知,本文提出的神经网络滑模变结构控制算法在考虑建模不确定项和摩擦干扰等因素的情况下能够很好地跟踪期望轨迹,稳态误差接近于零,具有较好的鲁棒性。
4 结论
本文结合滚仰式导引头稳定平台的机械结构特性,通过坐标系变换分析了其运动学特性并建立了平台的动力学模型,针对工程应用中建模不确定性和非线性因素的影响,提出了一種基于神经网络的滑模变结构控制算法,结合某样机平台参数进行仿真分析。结果表明,本文提出的算法通过采用神经网络可自适应逼近模型未知部分,有效抵抗干扰等非线性因素的影响,具有较好的鲁棒性。
参考文献:
[1]樊会涛,张蓬蓬.空空导弹面临的挑战[J].航空兵器,2017(2):3-7.
[2]王远飞,刘晓利,陈志华.速率稳定滚仰式导引头跟踪回路自抗扰控制器设计与仿真[J].航空兵器,2020(1):64-70.
[3]韩宇萌,贾晓红,王炜强.基于BP神经网络的捷联导引头控制系统设计[J].兵器装备工程学报,2016(10):70-74.
[4]董小萌,张平,付奎生.极坐标捷联式视觉导引平台的机电建模与仿真[J].系统仿真学报,2009(1):262-265.
[5]陈雨,赵剡,张同贺,等.滚仰式捷联导引头跟踪原理与仿真[J].航空兵器,2010(5):55-58.
[6]王志伟,祈载康,王江.滚-仰式导引头跟踪原理[J].红外与激光工程,2008(2):274-277.
[7]付奎生.两轴捷联稳定跟踪平台关键技术分析[J].电光与控制,2009(7):53-55.
[8]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005:80.
猜你喜欢
中学生学习报(2022年24期)2022-05-18
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
数理化解题研究·综合版(2021年11期)2021-12-22
计算技术与自动化(2021年2期)2021-11-10
小学教学研究(2021年5期)2021-09-29
计算机与网络(2021年6期)2021-06-01
课程教育研究(2021年27期)2021-04-13
初中生世界·九年级(2020年2期)2020-04-10
华东师范大学学报(自然科学版)(2019年5期)2019-11-11