
西藏巨龙知不拉矿区Ⅰ-1矿体采空区综合探测应用研究
2021-09-14 03:58赖渊平林春平刘建东
现代矿业 2021年8期
赖渊平 林春平 张 驰 刘建东
(1.西藏巨龙铜业有限公司;2.矿冶科技集团有限公司)
采空区根据其形成方式可以分为2 类,一类是按照统一规划设计有序回采而形成的,通常这种采空区的分布位置、空区边界以及大小均能在图纸上准确标出;另外一类是由于民间掠夺式开采留下的大量不规则采空区,这一类采空区通常表现为空间上多数呈现重叠现象,且无规律可循[1-2]。对于分布位置相对明确的采空区而言,通常处理起来比较简单,且能够依据空区分布情况开展后续回采设计,并不会对矿山管理及安全生产造成太大影响;对于不规则采空区,由于其分布情况不明,严重影响到矿山生产安全,特别是一些在露天矿山边坡台阶下盗采形成的采空区,在矿山实施正常回采的过程中出现了人员及设备跌落采空区的重大安全事故,造成人员及财产损失,影响矿山正常生产[3-4]。
针对上述矿山生产过程中面临的采空区隐患,国内外很多科研机构及矿山企业分别从空区形成机制、空区探测仪器等方面开展了研究工作。目前,采空区的探测主要以采矿情况调研、地球物理勘探[5-8]、工程钻探等为主[9-10],但由于工程岩体结构的特殊性以及不明采空区分布的复杂性,导致单纯依靠上述方法很难准确确定采空区的完整边界,甚至出现了探测结果误导矿山生产管理的情况。因此,选择一种功能强大、技术可靠、经济合理的探测方法,是当前阶段矿山在处理采空区问题时需要解决的首要问题。
三维激光扫描技术[11-13]是近年来快速发展的一种新兴技术,其在矿山测量中得到了很好的应用,尤其是相关的三维激光扫描产品层出不穷,其凭借非接触、高效率、远距离以及高精度的特点,特别适用于空洞结构三维形态的测量工作,在通视条件下可准确构建采空区的三维边界形态,较好地弥补常规探测方式在探测效果方面存在的不足。
本研究针对西藏巨龙铜矿知不拉矿区Ⅰ-1 矿体采空区探测问题,通过采用综合物探与三维激光扫描探测相结合的方式,对露天采场下部采空区的分布情况进行探测,为下一步矿山管理及安全生产奠定基础。
1 矿区概况
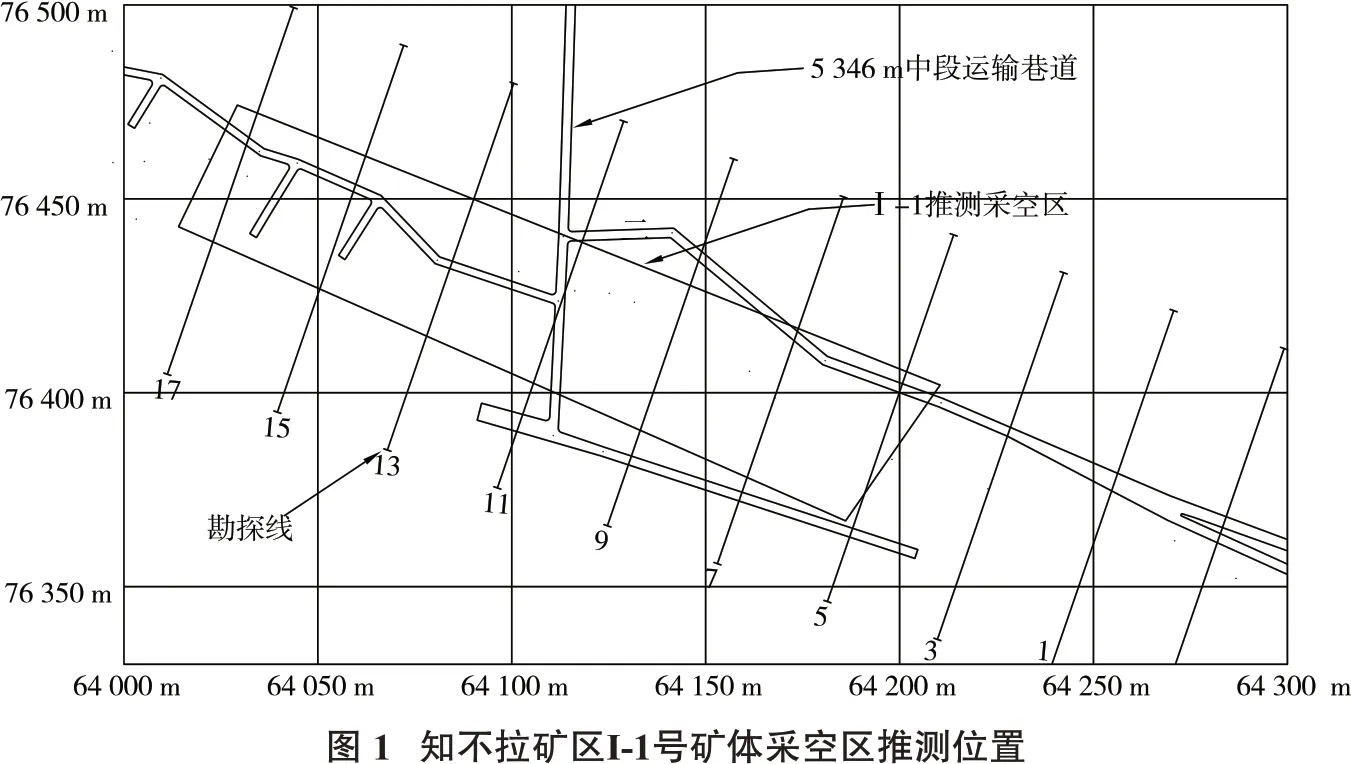
西藏巨龙铜矿知不拉矿区位于墨竹工卡县城南西34.5 km处,冈底斯山脉东余脉郭喀拉日居北麓,海拔高度为5 050~5 594 m,相对高差为444 m,开采高程范围为5 280~5 380 m。其中Ⅰ-1号矿体呈近东西向展布于矿区中部,呈似层状、大脉状产出,具膨大狭缩现象。矿体走向为283°~103°,倾向为10°~15°,倾角为66°~85°。矿体单工程厚度为0.86~20.17 m,平均厚3.87 m。I-1 号矿体截止探测工作实施前,实际开采底界为5 346 m 水平,形成采空区高度约为28 m,主要分布于5~17 勘探线,开采长度约为256 m,具体如图1所示。
2 勘查方法简介
知不拉矿区I-1 号矿体所在区域地层主要为灰岩、绿帘石榴石矽卡岩等,主要蚀变类型为硅化、矽卡岩化,井下空区主要为原有矿体被开挖后形成的采空巷道,在巷道顶板保存完整时,巷道以不充水或充水的空洞形式保存下来,巷道与周围地层的地球物理特征发生了显著变化。基于以上岩层特点,为了较为准确确定采空区的具体位置,首先采用物理勘探的方式确定采空区的大致分布位置,再通过钻凿探测孔的方式验证采空区位置,同时下放专业的扫描设备,从而达到精确探测采空区空间形态的目的。为此,本研究首先选用适用于灰岩及矽卡岩岩性特质,且能够满足井下坑道探测需要的地质雷达探测设备和瞬变电磁探测设备,确定井下坑道及采空区的大致分布位置,然后采用C-ALS 三维激光扫描测量系统对采空区进行扫描,构建采空区三维实体模型。
2.1 Zond-12e型地质雷达系统
地质雷达是一种利用发射天线将高频的电磁波以宽带短脉冲形式送入地下,被地下介质反射后,再由接收天线接收的探测设备。本研究采用拉脱维亚Zond-12e 型地质雷达进行探测,采用38 MHz 组合非屏蔽天线,间距1 m,根据现场实际情况调整记录时间、叠加次数以及采样率等。
2.2 HPTEM-08型瞬变电磁系统
HPTEM-08 型高精度瞬变电磁系统采用等值反磁通法消除收发线圈之间的耦合,利用对偶中心耦合原理提高横向分辨率,采用统一标准的微线圈对偶磁源、高灵敏磁感应接收传感器、高速24位采集卡以及高密度测量技术实现浅层高精度瞬变电磁勘探。HPTEM-08 型高精度瞬变电磁仪的勘探深度和发送频率有关,勘探深度越深,所要求的发送频率越小,反之,则发送频率越大。叠加次数的选择则主要与当地的噪声水平有关,理论上叠加次数越大,采集到的衰减曲线信号信噪比越高。
2.3 C-ALS三维激光扫描测量系统
C-ALS 三维激光扫描测量系统是通过钻孔将扫描系统深入采空区的内部,从而完成采空区扫描探测工作,通过扫描探测点云来逼近目标的完整原形及矢量化数据结构,可进行目标的三维重建。然后通过全面的后处理可获取复杂形体的几何内容,如距离、面积、体积、目标结构形变、结构位移及变化关系等。
3 采空区及坑道地表勘探
3.1 测线及桩号设计
根据知不拉矿区前期开采留存的技术资料,Ⅰ-1 号矿体原主要采用浅孔留矿法,空区形状与现有地质资料符合度相对较高,空区高度以及空区的位置与现存图纸材料有部分偏差。由于现场坡度大,无法形成探测平台,因此结合知不拉矿区地表实际情况,选定推测采空区所在区域范围的东南侧开展物探工作,一方面辅助确定地下坑道的展布位置,另一方面结合采矿工艺特点确定采空区的大致方位,为确定空区探测孔的钻凿位置提供基础数据。基于上述工作原则,现场地质雷达探测方式实际设置测点个数共计1 874 个,测线长度约为620 m;瞬变电磁探测方式设置测点个数200个,实际测线长度为620 m。
3.2 物探现场实施
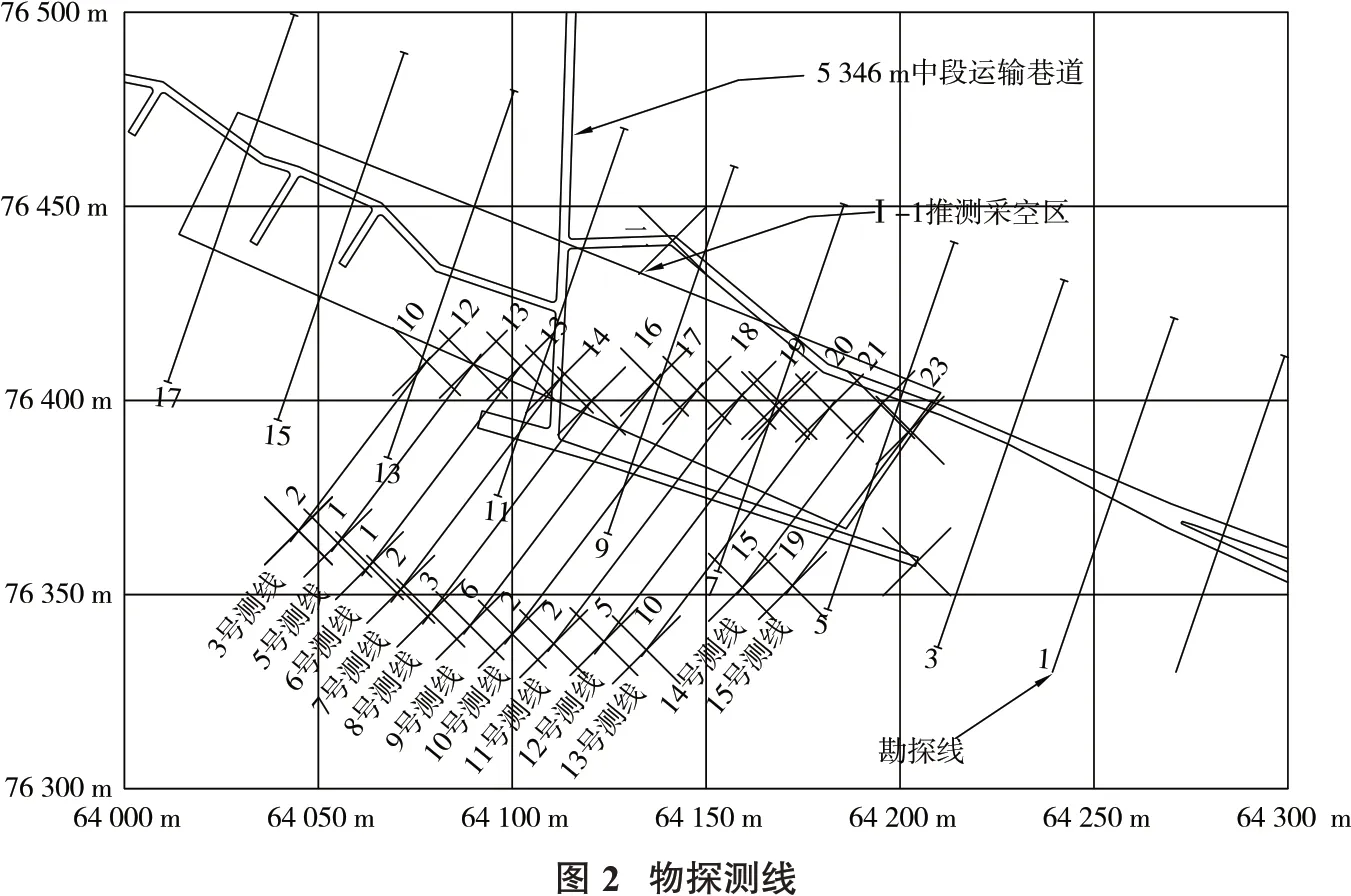
根据预先设计的物探控制点,地质雷达探测法按照3 号测线、5~8 号测线以及10 号测线,每间隔0.5 m 布置测点,9 号测线、11~15 号测线每间隔0.25 m 布置测点;瞬变电磁法按照3 号测线、6~12 号测线每间隔5 m 布置测点,5 号测线按照每间隔3 m 布置测点,13~15号测线每间隔2 m布置测点,具体如图2所示。
3.3 物探结果分析
基于现场开展的物探测量工作,得到了各条测线的地质雷达和瞬变电磁法探测结果,图3 展示了7号测线的探测效果图,其中,图3(a)中横坐标表示该测线上相对起始点的直线距离,纵坐标表示相对各个桩点的垂直深度;图3(b)横坐标表示该测线上相对起始点的直线距离,纵坐标表示空区实际赋存标高。
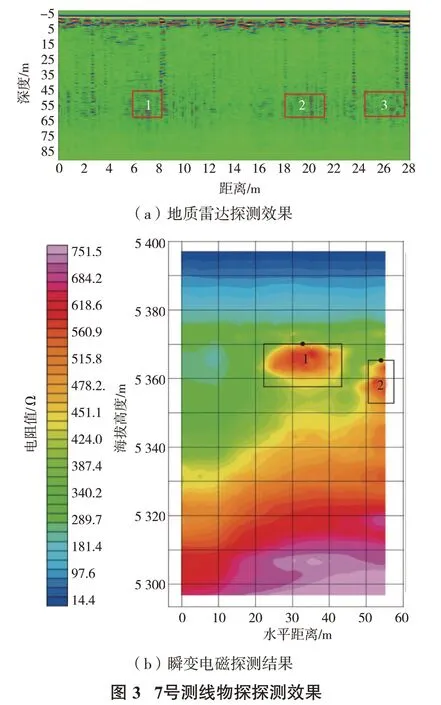
由图7 可知,7 号测线1 号、2 号和3 号区域电磁波发生震荡,反射极强,叠加干涉现象严重,振幅增强,波组难以区分,多次波明显,具有较为明显的采空区巷道洞反射特征,且结合瞬变电磁探测结果对应区域分布高阻异常,因此推断上述异常区域存在采空巷道或者较大裂隙垮塌。同样地,分析其他测线得到异常区域的具体位置统计如表1所示。

3.4 地下坑道推断模型构建
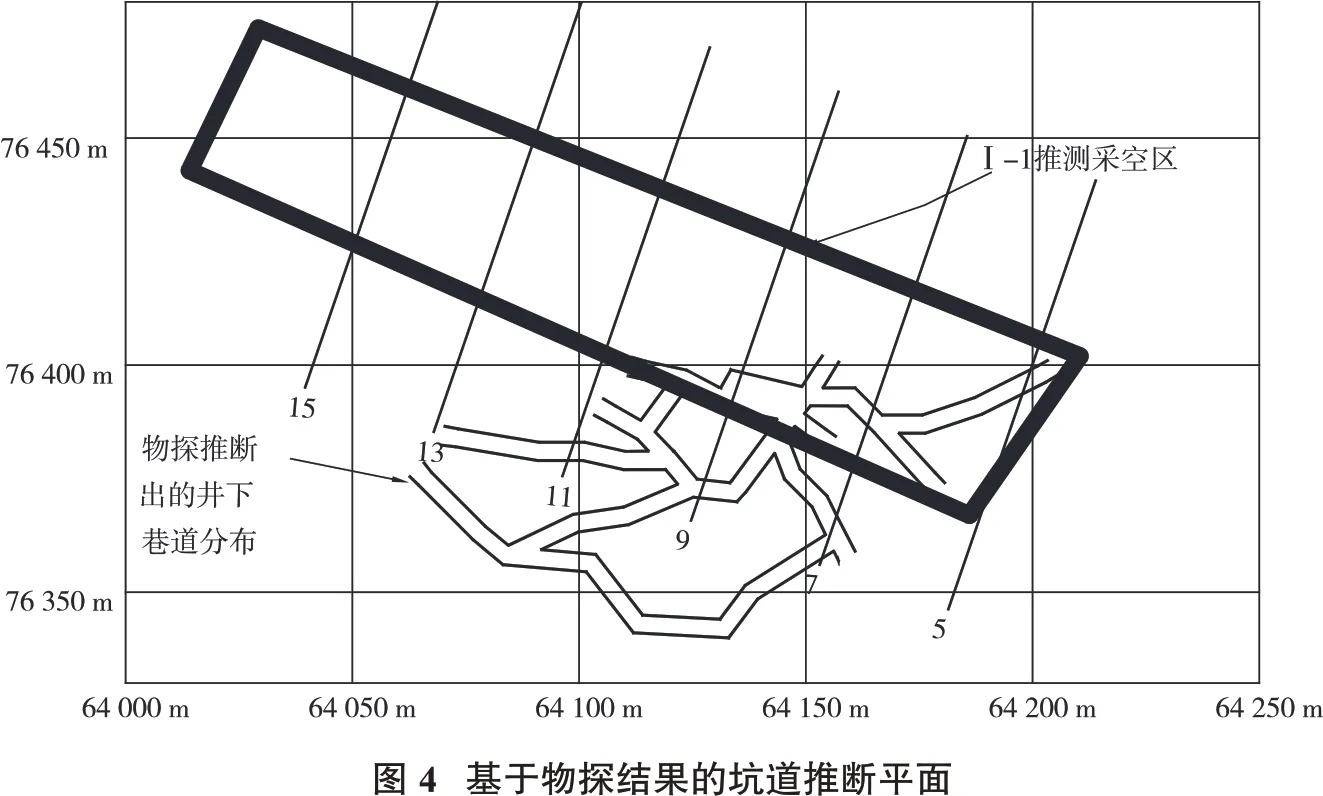
综合上述地质雷达和瞬变电磁的异常位置分布,以异常位置为中心,根据常规巷道的掘进尺寸分别向两侧延伸2 m,得到如图4所示的知不拉矿区I-1号矿体隐伏采空区周边的巷道展布平面图。
4 空区三维激光扫描
根据上述物探确定的地下坑道分布情况并结合矿体走向及开拓工程布置情况,推测采空区分布区域应该在坑道的北部,基于此,设计地表探测孔通达矿体,一方面用于验证物探结果,另一方面用于下放三维激光扫描测量系统,以达到精确探测采空区的目的。
4.1 探测孔设计
根据上述物探探测结果,结合矿山实际钻探实施条件,在探测坑道一侧开拓工程布置区域设计探测孔9 个,分别为TK-1、TK-2、TK-3、TK-4、TK-5、TK-6、TK-6'、TK-7、TK-7'。
4.2 现场扫描实施
根据预先设计的探测孔位置,依次钻凿发现TK-1 钻进12 m 后底部全部为堆积矿渣,无法进行,TK-2 孔钻进31 m 后发现空区,TK-3 孔钻进26 m 后发现空区,TK-4 孔钻进31 m 后发现空区,TK-5、TK-6、TK-6'、TK-7、TK-7'均未发现空区,因此对TK-2,TK-3,TK-4进行三维激光扫描。
4.3 扫描结果分析
根据上述实施的扫描工作,得到如图5 所示的采空区三维模型,这里将物探得到的坑道模型与扫描模型进行了复合。
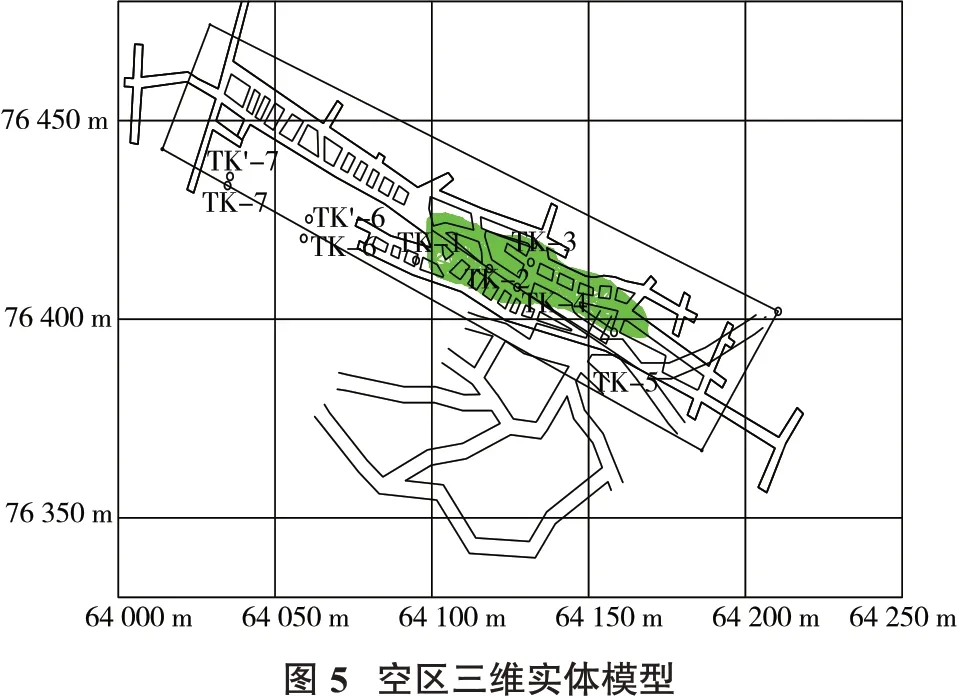
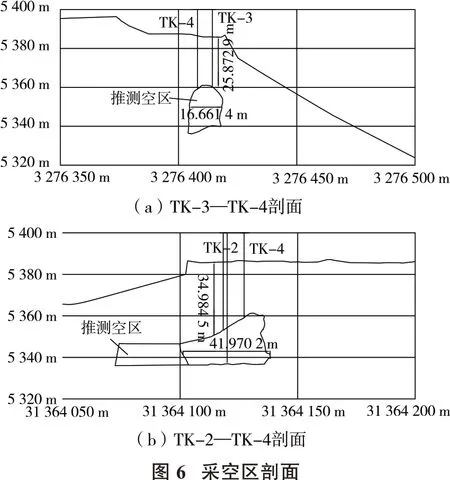
根据构建的采空区三维模型,分别沿TK-3 和TK-4、TK-2和TK-4截取剖面,如图6所示。
根据空区探测的结果可知,空区顶板高度东高西低,最高处位于空区东部,高程为5 361 m,距离地表23 m,最低位于空区西部,距离地表38 m,空区高度为10~26 m;空区底板标高起伏不大,高程约为5 336 m,空区宽度为17 m;根据目前空区探测情况,空区形状与矿体形状契合度很高,对于矿山后期制定详细的空区治理措施及矿山安全至关重要。
5 结论
(1)采用地质雷达和瞬变电磁综合物探方法确定了井下坑道的大致位置及分布情况,为开展精准的采空区探测及后期安全作业奠定了基础。
(2)采用三维激光扫描方式对探测到的采空区进行了精确扫描,建立了采空区三维实体模型,统计了采空区顶底板标高、长度及宽度信息,为矿山后期制定合理的采空区处理方案提供了准确的数据。
猜你喜欢
石油物探(2022年6期)2022-12-03
露天采矿技术(2022年1期)2022-02-20
党史博览(2020年9期)2020-10-27
环球时报(2019-01-10)2019-01-10
智能城市(2018年8期)2018-07-06
采矿技术(2018年3期)2018-05-30
物探化探计算技术(2016年6期)2017-01-12
云南地质(2015年3期)2015-12-08
地质力学学报(2014年3期)2014-12-11
采矿技术(2011年4期)2011-11-16
