
基于机器视觉的管道巡检机器人设计与实现探讨
2021-09-12 16:00李洋冯敏叶韬李欢辛玉强
科技尚品 2021年7期
李洋 冯敏 叶韬 李欢 辛玉强
摘 要:管道属于一种基础设施,在很多领域中都有广泛的应用,比如排水、排污、输气、输油等,和社会民生有重要的联系,因此,对管道进行质量检测非常重要。由于管道大部分都是金屬性质,使用传统的管道检测机器人检测的数据需要利用信号线进行传输,这会对长管道检测产生限制。为了能够弥补管道检测机器人中存在的问题,文章基于机器视觉进行了管道巡检机器人的设计和实现,以供参考。
关键词:管道巡检机器人;机器视觉;设计;实现
中图分类号:TP2 文献标识码:A文章编号:1674-1064(2021)07-003-02
DOI:10.12310/j.issn.1674-1064.2021.07.002
管道是基础设施中的一种,在多个重要领域中都有较好的应用,和社会民生具有密切的联系。而且由于管道网络的不断完善,维护工作难度的逐渐加大,对其进行质量检测非常重要,是确保管道能够正常使用的基础。但是由于管道所处环境的特殊性,管道质量检测存在较大难度。在科技不断进步的过程中,使用机器人检测管道内部情况的方式逐渐被应用,能够有效提高检测的便捷性和准确性。
1 管道巡检机器人结构设计
1.1 总体设计方案
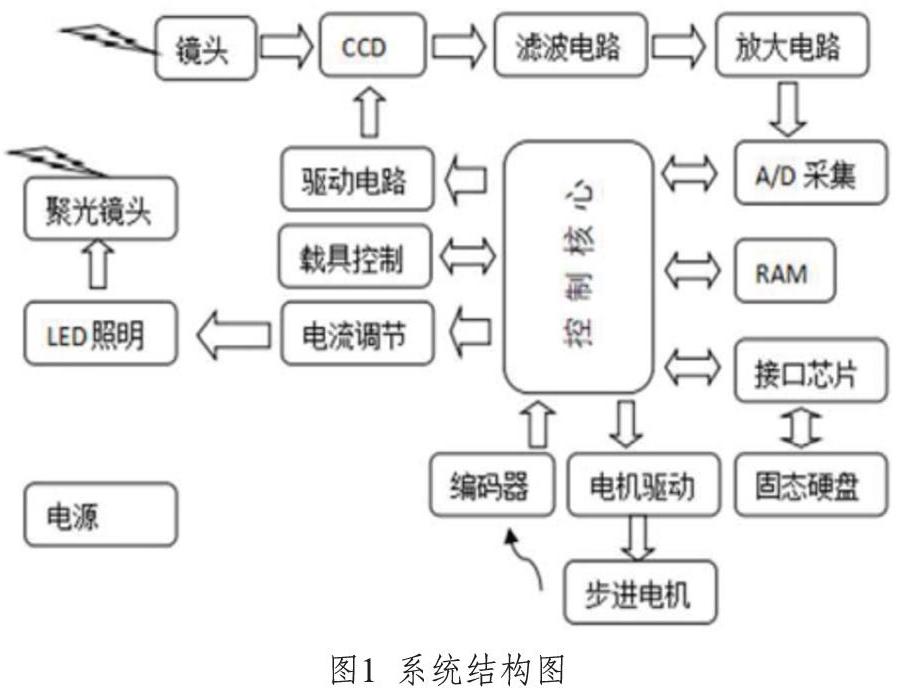
机器视觉下的管道巡检机器人设计需要注意其性能和效率,所以总体设计方案要从预期效果、研发经济性等方面进行综合考量,从现阶段管道巡检机器人中存在的问题出发进行设计。结构模块主要包含以下内容。其中,系统照明单元的组成主要有LED照明、聚光镜头、电流调节等。系统图像采集单元主要构成有AD采集、驱动电路、放大电路、镜头等。系统存储单元的构成主要有固态硬盘和接口芯片。动力来源通过电机驱动,同时在行走轮上安装编码器来实现管道内定位。系统结构图如图1所示。
1.1.1 图像采集单元
在机器人两侧设计安装CCD,利用驱动电路、滤波电路、放大电路等对图像进行采集[1]。控制核心通过对步机的控制实现旋转,使机器人两侧的CCD对管道内部完成360°的图像采集。
1.1.2 数据存储单元
对于采集到的图像数据,可利用控制核心控制接口芯片实现存储。
1.1.3 管道内定位单元
机器人上设测距轮,然后设置编码器,利用控制器和编码器实现连接,主要使用编码器输出脉冲对测距轮管壁行进距离进行测量[2]。
1.1.4 姿态控制单元
由于机器人在运行中容易出现倾覆,为了避免这一情况发生,在机器人上设置陀螺仪,连接控制核心和陀螺仪。其中,控制核心对驱动电路的控制主要通过分析机器人的姿态信号来实现,对其姿态可以控制调整,以此保证机器人在运行中处于平衡状态。
1.1.5 照明单元
对管道进行检测时,如果内部光线不足,机器人在采集图像时就会受到限制,为了能够提高图像采集的清晰度,在CCD摄像机前设计LED照明灯,然后借助电流调节电路连接控制核心。
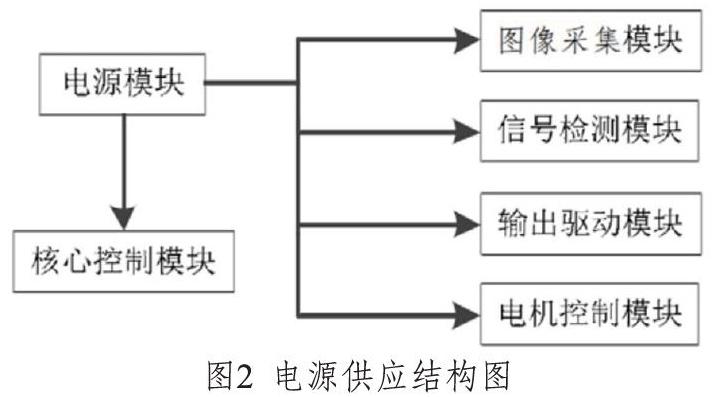
1.1.6 电源单元
为了能够更好地实现长管道检测,保证管道巡检机器人在管道内灵活地运行,电源单元设计主要使用机器人自携带能源的方式。其中,电源供应结构图如图2所示。
借助驱动电机为管道巡检机器人提供动力,保证在管道内部可以前进,同时利用图像采集单元对内壁图像进行收集,然后存储到硬盘中,再由工作人员确认检查结果中有没有出现管道损坏、腐蚀等问题,结合具体情况对管道进行维护或更换。
1.2 结构设计
所设计的管道巡检机器人适用的范围较广,而大部分管道都是埋于地下,管道内部光线不足,图像采集单元采集图像受限,需要设置照明单元。同时,由于管道投入运行后服役时间较长,工作环境也较差,内部情况复杂性较强,设计的机器人要能够有较强的通行性和牵引力,以及较高的可靠性。具体设计要求:越过障碍能力较强,具有较大的牵引力,由于管道存在弯道情况,机器人要能够自主转向,部分管道较长,行走距离要满足对长管道的检测要求,具有较高的可靠性,满足低成本的要求[3]。
机器人在管道内部运行主要是依照预定任务进行检测,需要有照明系统、图像采集系统,提供维持运动的牵引力,可以携带相关的装置和检测仪。由于管道内部环境较为复杂,所以机器人的运动具有不确定性,机器人在运行时要具有较强的越过障碍能力。为了满足复杂环境下对管道内部的检测需求,机器人设计主要使用履带式行走方式,这种机器人可以适应较复杂的环境,在管道检测时牵引力、装备携带能力较强。
2 巡检机器人运动控制和管道内自主定位实现
2.1 运动控制
管道巡检机器人电机需要有足够的电流支撑运行,而数字电路输出电流不能够完全满足驱动电机的运行需求,所以在该设计中使用4片半桥芯片构成双H桥电路的方式进行驱动。其中,H桥的前级使用HC541进行驱动,数字电路的逻辑输出有4个口,分别输入到HC541的4个引脚,经过HC541增强后再输出,输入到半桥芯片中进行放大,接着通过端子连接到步进电机的相中。系统使用16位宽度的总线,通过地址线、数据线驱动和管理外围的部件。
2.2 管道内自主定位
巡检机器人对管道进行检测时,要能够实现自主定位,这样在管道内部的运行才会更加灵活。设计中主要使用测距轮实现,将编码器安装设置在测距轮上,机器人在运行时,编码器转动,借助编码器能够实现机器人直线转换为旋转的角位移,利用控制核心读取编码器的脉冲信号,然后检测出机器人各个时刻的位置,以此实现机器人自主定位。设计中使用的核心编码器,主要使用增量式,这种编码器具有较长的使用寿命、较强的环境适应性、较高的稳定性和可靠性。增量式编码器可以将机器人行走的位移信息转换为具有规律变化的电信号,再转换成脉冲信息,通过脉冲个数体现位移大小。
3 管道内壁图像采集系统和照明系统实现
3.1 图像采集系统整体设计
为了实现对管道内全图像数据信息的采集,设计中使用线阵CCD图像采集芯片。在机器人两侧安装两个步进电机,以此带动其实现旋转,对管道进行连续扫描,每次采集的图像经过拼接后就能够形成管道360°全图像。由于图像传感器的不同,线阵相机有CCD型和CMOS型,而CCD型具有较强的成像质量,噪声较低,失真性低。在管道内进行图像采集,需要具有較高的分辨率,所以设计中选择了线阵CCD作为图像采集芯片,图像采集之后存储到硬盘中,等待下一步处理。
3.2 CCD图像采集系统电路设计
3.2.1 数据采集电路
管道内壁图像数据采集中,通常会包含直流偏置和复位噪声信号,所以需要进行滤波处理,线阵CCD输出的图像数据中含有直流分量,对图像数据产生影响。在输入图像信号前,可使用电容隔离直流,将采集图像数据信号中的直流分量去除。
3.2.2 放大电路
由于CCD输出信号不强,而且伴有噪声,在进行采集之前需要进行滤波和放大处理。放大电路中,通过高速运算放大器放大信号到可以处理的程度,然后经过另外的运算放大器和外围部件共同组成限幅滤波器,可将信号增强到能够采集的程度。
3.2.3 CCD电路
线阵CCD是由电荷转移电极和光电二极管构成的光敏模块,驱动信号逻辑电路、转移栅、模拟寄存器、输出缓存结构部分构成。
3.3 照明系统实现
照明系统主要使用LED点阵光源,主要是因为LED属于固体半导体发光材料,具有较好的响应速度,而且节能环保。LED灯对电流具有较高的要求,设计中为了使LED灯在运行时满足照明要求,同时在安全的电流范围内,使用发光二极管进行恒流控制,电源电流在经过控制后流过发光二极管。
4 结语
综上所述,笔者对基于机器视觉的管道巡检机器人进行了设计,通过试验验证,设计可以达到预期目标,对管道检测能有较好的效果。
参考文献
[1] 王鹏飞.基于机器视觉的管道巡检机器人设计与实现[D].西安:西京学院,2020.
[2] 汤义勤,高彦波,邹洪亮,等.基于机器视觉的室内无轨巡检机器人导航系统[J].自动化与仪表,2020(8):42-46.
[3] 卢银辉,杨勇.基于机器视觉的输煤现场巡检机器人控制系统设计[J].电子技术与软件工程,2019(6):102-103.
猜你喜欢
中国品牌(2020年11期)2020-12-23
Coco薇(2017年5期)2017-06-05
办公室业务(2016年9期)2016-11-23
电脑知识与技术(2016年25期)2016-11-16
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
中国新通信(2016年16期)2016-10-18
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04
Coco薇(2015年12期)2015-12-10
