
新四翼超混沌系统的线性反馈控制
2021-09-12 03:18李德奎
贵州大学学报(自然科学版) 2021年4期


摘 要:為了奠定新四翼超混沌系统应用的理论基础。首先,比较新四翼超混沌系统与一些经典混沌或超混沌系统的最大Lyapunov指数,结果新四翼超混沌系统的最大Lyapunov指数值最大,说明新四翼超混沌系统具有更强的混沌特性;其次,对新四翼超混沌变量y和u进行线性反馈控制,应用Lyapunov函数方法,发现系统的所有状态变量能够指数稳定到原点,并系统具有很大的控制域;最后,数值仿真表明在控制域内任取一点,设计的线性反馈控制器是有效的。
关键词:新四翼超混沌系统;Lyapunov函数;线性反馈控制;指数稳定
中图分类号:O415.5
文献标志码:A
自从美国气象学家LORENZ提出了LORENZ混沌系统[1]以来,混沌系统的构造和控制得到了广大学者的普遍关注。陈关荣和吕金虎利用混沌反控制方法,分别发现了著名的CHEN系统[2]和L系统[3]。随后LIU构造了一个四翼混沌系统[4],尽管后来被证明该四翼混沌系统是假的, 却引起了学术界对四翼和多翼混沌系统研究的兴趣。文献[5]提出一个具有双曲正弦非线性项的四翼三维混沌系统。文献[6]构造了一个具有四翼吸引子的超混沌系统,计算出其最大Lyapunov指数值为5.879 4,并分析了系统的动力学行为。文献[7]构造了一个四翼超混沌系统,利用数值仿真的方法,绘制了系统的分岔图及Lyapunov指数谱,分析了随参数变化时系统动力学行为的演化,但其最大Lyapunov指数值小于1,系统的混沌特性不强。文献[8]基于三八超混沌系统[9],通过增加一个外激励信号的方法,得到了一个新四翼超混沌系统,该系统具有两个正的Lyapunov指数值,且最大Lyapunov指数值为6.146 2,具有较强的混沌特性,在工程技术领域具有潜在的应用价值。
混沌系统是非线性随机系统,对初值具有极端敏感性,因此对混沌的控制和应用是科学界长期以来普遍关注的焦点课题,并取得了丰硕的研究成果[10]。混沌控制的著名的方法有:参数微扰法[10]、时滞反馈控制法[11]、自适应控制法[12]、滑模控制法[13]、线性反馈控制法等。其中,参数微扰法是1990年美国Maryland大学的三位科学家OTT,GRELOGI和YORKE提出的一种混沌控制方法,后来为了纪念这三位科学家,将这种方法称为OGY方法。在混沌系统参数已知的条件下,线性反馈控制法具有控制系数易于计算、控制器结构形式简单,电路实现容易等优点。
基于以上讨论,本文通过Lyapunov指数方法,分析新四翼超混沌系统的混沌特性,并构造线性反馈控制器,对其进行线性反馈控制,为新四翼超混沌系统在工程技术中的应用奠定理论基础。
1 新四翼超混沌系统
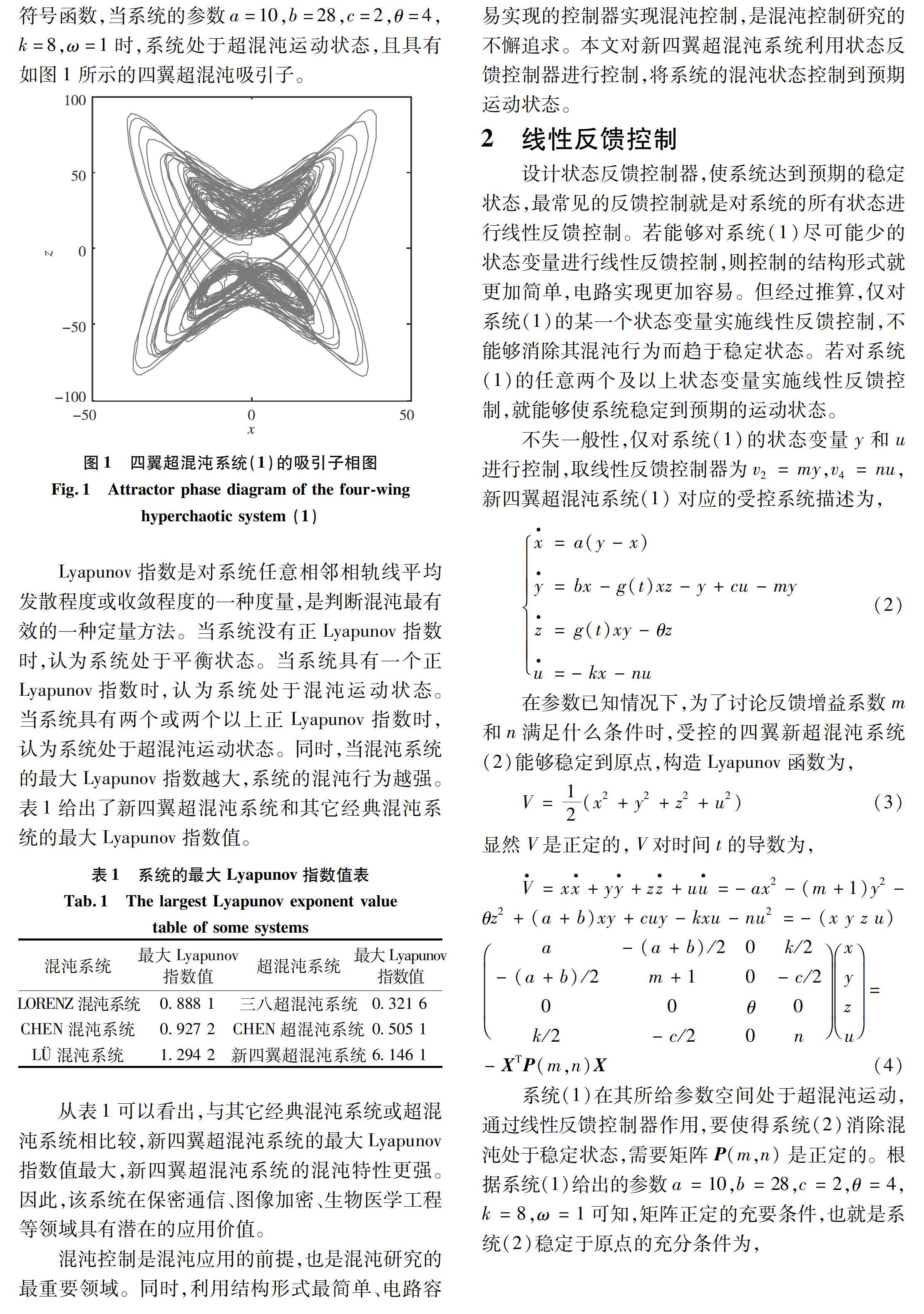
从表1可以看出,与其它经典混沌系统或超混沌系统相比较,新四翼超混沌系统的最大Lyapunov指数值最大,新四翼超混沌系统的混沌特性更强。因此,该系统在保密通信、图像加密、生物医学工程等领域具有潜在的应用价值。
混沌控制是混沌应用的前提,也是混沌研究的最重要领域。同时,利用结构形式最简单、电路容易实现的控制器实现混沌控制,是混沌控制研究的不懈追求。本文对新四翼超混沌系统利用状态反馈控制器进行控制,将系统的混沌状态控制到预期运动状态。
2 线性反馈控制
设计状态反馈控制器,使系统达到预期的稳定状态,最常见的反馈控制就是对系统的所有状态进行线性反馈控制。若能够对系统(1)尽可能少的状态变量进行线性反馈控制,则控制的结构形式就更加简单,电路实现更加容易。但经过推算,仅对系统(1)的某一个状态变量实施线性反馈控制,不能够消除其混沌行为而趋于稳定状态。若对系统(1)的任意两个及以上状态变量实施线性反馈控制,就能够使系统稳定到预期的运动状态。
从图2可以看出,新四翼超混沌系统具有很大的控制域。为了验证控制器对新四翼超混沌系统(1)的控制效果,分别任意选取控制域(I)中的A点和非控制域中的B点设置控制器,选取系统(1)初始值为(x(0),y(0),z(0),u(0))=(6,2,2,3),观察受控系统(2)状态变量的变化情况。
图3所示为控制域(I)中A点线性反馈控制器对新四翼超混沌系统的控制效果。当t∈[0,20]时,系统(1)处于超混沌运动状态。在t=20 s时,对系统(1)施加线性反馈控制器v2=my,v4=nu,其中m=40和n=30。当t∈[20,40]时,受控系统(2)的各状态变量迅速趋于零,说明在控制域(I)中任意选取一点,设计线性反馈控制器,能够将新四翼超混沌系统(1)的各状态变量控制到原点。
图4所示为非控制域(II)中B点线性反馈控制器对新四翼超混沌系统的控制效果。当t∈[0,20]时,系统(1)处于超混沌运动状态。在t=20 s时,对系统(1)施加线性反馈控制器v2=my,v4=nu,其中m=20和n=20。当t∈[20,40]时,受控系统(2)的状态变量z不能趋向于零,说明在控制域外的区域任意选取一点,设计线性反馈控制器,不能够将新四翼超混沌系统(1)的状态变量控制到原点。
4 结论
对新四翼超混沌系统的Lyapunov研究发现,其最大Lyapunov指数值大于一些经典混沌系统或超混沌系统的最大Lyapunov指数值。进一步说明新四翼超混沌系统的具有更强的混沌特性,在实际工程技术领域具有潜在的应用价值。
通过推算发现仅对新四翼超混沌系统中某一个状态变量实施线性反馈控制,不能够彻底消除其混沌行为,如果对其任意两个及以上状态变量实施线性反馈控制,就能够使系统稳定到原点。通过对其状态变量y和u进行线性反馈控制,发现新四翼超混沌系统具有很大的控制域。
在控制域內任取一点,设计线性反馈控制器,能够将新四翼超混沌系统的状态变量指数稳定到原点,在控制域以外的非控制域所取的点,设计的线性反馈控制器不能使其状态变量稳定到原点。
参考文献:
[1]LORENZ E N. Deterministic non-periodic flow[J]. Journal of Atmosphere Science, 1963, 20: 130-141.
[2]CHEN G, UETA T. Yet another chaotic attractor[J]. International Journal of Bifurcation and Chaos,1999, 9(7): 1465-1466.
[3]L J, CHEN G. A new chaotic attractor coined[J]. Int. J. Bifurcation and Chaos, 2002, 12(3): 659-661.
[4]LIU W, CHEN G. A new chaotic system and its generation[J]. Int. J. Bifurcation and Chaos, 2003, 13(1): 261-267.
[5]WANG Z, VOLOS C, KINGNI S T, et al. Four-wing attractors in a novel chaotic system with hyperbolic sine nonlinearity[J]. Optik, 2017, 131:1071-1078.
[6]张莉,谢悦,安新磊. 一个具有四翼吸引子的超混沌系统[J]. 河北师范大学学报(自然科学版), 2019, 43(6): 490-496.
[7]高智中. 新四翼超混沌系统的动力学分析[J]. 齐齐哈尔大学学报(自然科学版), 2019, 35(2): 87-90.
[8]李德奎. 一类多翼混沌吸引子系统的设计与仿真[J]. 宁夏大学学报(自然科学版), 2020, 41(1): 33-37.
[9]李德奎. 三八超混沌系统的时滞反馈控制[J]. 贵州大学学报(自然科学版), 2020, 37(6): 24-29.
[10]吴德华, 林毅. 基于混沌的汇流瓶颈区交通流模糊控制与仿真研究[J]. 贵州大学学报(自然科学版),2017, 34(6): 110-114.
[11]OTT E, GREBOGI C, YORKE J A. Controlling chaos[J]. Physics Review Letters, 1990, 64(11): 1196 -1199.
[12]徐昌进. Arneodo混沌动力系统的时滞反馈控制[J]. 西南大学学报(自然科学版), 2013, 35(3):1-8.
[13]LI D K. Modified functional projective synchronization of the unidirectional and bidirectional hybrid connective star network with coupling time-delay[J]. Wuhan University Journal of Natural Sciences, 2019, 24(4): 321-328.
(责任编辑:于慧梅)
Abstract:
In order to lay theoretical foundation for the application of new four-wing hyperchaotic systems. Firstly,the largest Lyapunov exponents of the new four-wing hyperchaotic systems are compared with the largest Lyapunov exponents of some classical chaotic or hyperchaotic systems, it is found that the largest Lyapunov exponent of the new four-wing hyperchaotic system is the largest, which shows that the new four-wing hyperchaotic system has stronger chaotic characteristics. Secondly, when state variables y and u of the new four-wing hyperchaotic system are linear feedback controlled, by using the Lyapunov function method, it is found that all the state variables of the system can be exponentially stable to the origin and the system has a large control domain. Finally, the numerical simulation shows that choosing any point in the control domain to design the linear feedback controller is effective.
Key words:
new four-wing hyperchaotic system; Lyapunov function; linear feedback control; exponential stability
