
基于稀疏表示和字典学习的地磁基准图构建方法
2021-09-11 09:10马啸宇张金生李婷郝亮亮
北京航空航天大学学报 2021年8期
马啸宇 张金生 李婷 郝亮亮
(火箭军工程大学 导弹工程学院, 西安 710025)
导航技术近年来得到了飞速的发展,惯性导航技术和卫星导航技术是导航制导领域的主要研究方向。 但是惯性导航在长距离任务中陀螺仪漂移会随时间不断积累,卫星导航容易受到各种环境因素干扰。 地磁导航技术是一种重要的辅助导航手段,由于地磁场较为稳定且具有时间变化较小和抗干扰能力强等特点,逐渐受到广泛关注和研究[1-4]。
地磁匹配导航技术首先对地磁场进行建模以及数据采集,制备地磁基准图,而后对目标区域进行实时磁测信息采集,最后将采集到的地磁场信息与基准图进行匹配,从而实现定位导航的目的[5-6]。 因此,高精度的地磁基准图是实现地磁匹配导航的基础。
目前,地磁基准图的构建方法主要有2 种:①根据现有的地磁场物理模型进行构建[7];②根据实测地磁场数据,构建网格化地磁基准图[8]。现有的世界磁场模型(WMM)和国际地磁参考磁场(IGRF)针对地球的主磁场模型进行分析[9]。一般情况下,地球内部异常场最能体现局部地磁场的特点,而在世界地磁场模型很难体现异常场的变化。 因此,在对局部地区地磁场进行高精度构建时,一般利用基于实测数据插值建模的方法[10]。 近年来,针对地磁基准图构建方法的研究主要集中在插值法方面,常用的方法有双三次插值、Kriging 插值、基于粒子群优化(Particle Swam Optimization,PSO)算法的PSO-Kriging 插值等[11]。现有算法虽然在基准图的峰值信噪比(PSNR)和均方根误差(RMSE)等评价指标方面有一定的提升,但对于磁测点之间的细节信息难以很好地恢复。
稀疏表示能够在稀疏字典下利用有限的稀疏系数对信号进行完整的表示,并且在图像处理领域已经得到广泛的应用[12-16]。 受到基于稀疏先验信息的图像超分辨率重建理论的启发[17-18],本文提出一种基于稀疏表示和字典学习的高精度地磁基准图构建方法。 主要工作包含以下几点:
1) 提出了一种基于稀疏表示和字典学习的地磁基准图构建方法。
2) 利用矩谐分析(RHA)理论的先验信息对稀疏字典进行了初始化,实验表明,该方法有效提高了稀疏字典的训练效率以及性能。
3) 利用本文方法与现有的地磁基准图构建方法,包括双三次插值、PSO-Kriging 插值等方法进行了对比,实验证明本文方法优于其他方法。
4) 在对于噪声的鲁棒性指标上与其他超分辨率重建方法进行了对比,实验证明本文方法优于其他方法。
1 地磁场模型
地磁场模型包括7 个分量,其中5 个为幅值分量,2 个为角度分量。 设地磁信号采集点为坐标原点,通常以地磁场三分量表示地磁场矢量,地磁场三分量定义3 个指定方向的地磁场分量,方向为地理北向、地磁东向与垂直向下,并分别记为Bx、By、Bz。 水平分量Bh通过Bx与By的矢量合成得到,表示总地磁矢量在水平面上的投影。 地磁场矢量的绝对值称为总场强度Bf。 2 个角度分量为磁偏角和磁倾角。 分量Bx与Bh之间的夹角定义为磁偏角Bd;总场强度Bf与分量Bh之间的夹角定义为磁倾角Bi。 地磁参考场的各特征关系如图1 所示,图中:D为磁偏角;I为磁倾角;F为总场。 因此,地磁场的7 个基本分量满足如下几何关系:
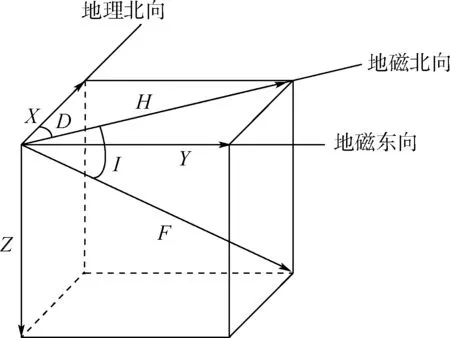
图1 地磁参考场特征Fig.1 Features of geomagnetic reference field

由上述关系可知,地磁场7 个要素只有3 个是相互独立的,因此对X、Y、Z3 个分量分别进行超分辨率重建,利用最终计算得到的总场强度来评价算法的性能。
2 稀疏表示
低分辨率基准图由高分辨率基准图经过模糊和下采样得到

式中:H为下采样矩阵;S为模糊矩阵。
由式(5)可知,超分辨率重建是一个病态问题,即式(5)是一个欠定方程组,每一个图像Y都对应无穷多个解。 但在以下约束条件下该问题能够得到很好的解决。
首先将一幅高分辨率地磁基准图X划分为图像块x,这些图像块可以被字典Dh稀疏表示为

式中:α为图像块x的稀疏表示系数;K为稀疏系数中非零项的最大数量。 由于低分辨率基准图和对应的高分辨率基准图具有相同的结构特征,可以通过训练得到低分辨率稀疏字典使得低分辨率基准图与高分辨率基准图具有相同的稀疏表示[19]。 低分辨率的基准图能够被字典Dl稀疏表示为
式中:F为低分辨率基准图的特征提取矩阵;y为原始高分辨率图像;ε为误差约束。 由于基准图的细节部分主要分布在高频部分,F的作用类似于一个高通滤波器。 最终目的是让恢复出来的基准图细节部分与原始基准图更相近。 由于式(7)中的问题是NP 难问题,只要α充分稀疏,就可以利用l1范数代替l0范数[20],如式(8)所示:
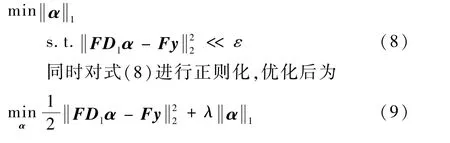
式中:λ用来平衡结果的稀疏程度和与原始信号的接近程度。 该问题可以通过凸优化的方法得到很好的解决。
单独处理式(9)中的问题无法保证相邻图像块之间的一致性。 因此,在满足式(9)的同时还需要加上一个限制条件,即重建后的相邻高分辨率图像块之间重叠部分要保证一致。 优化后的问题可表示为
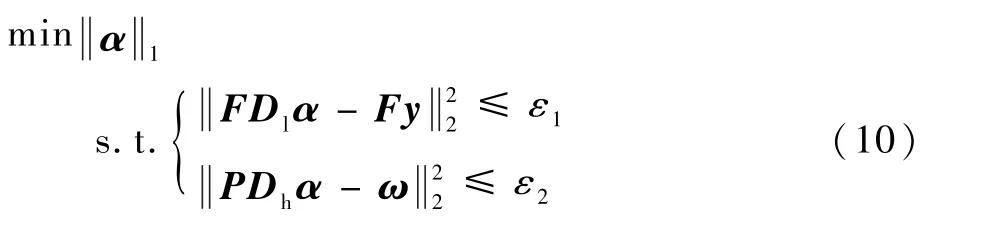
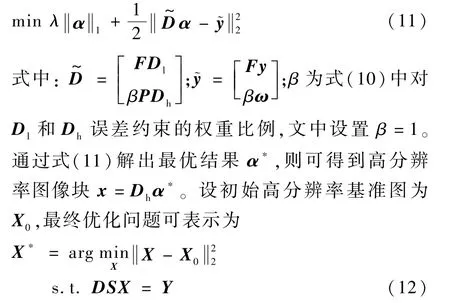
式中:矩阵P用于提取当前图像块与前一图像块的重叠部分;ω包含了重叠部分在前一图像块中的幅值;ε1和ε2分别表示低分辨率和高分辨率字典对基准图的重建误差约束。 式(10)可总结为以下形式:
具体方法流程如图2 所示。
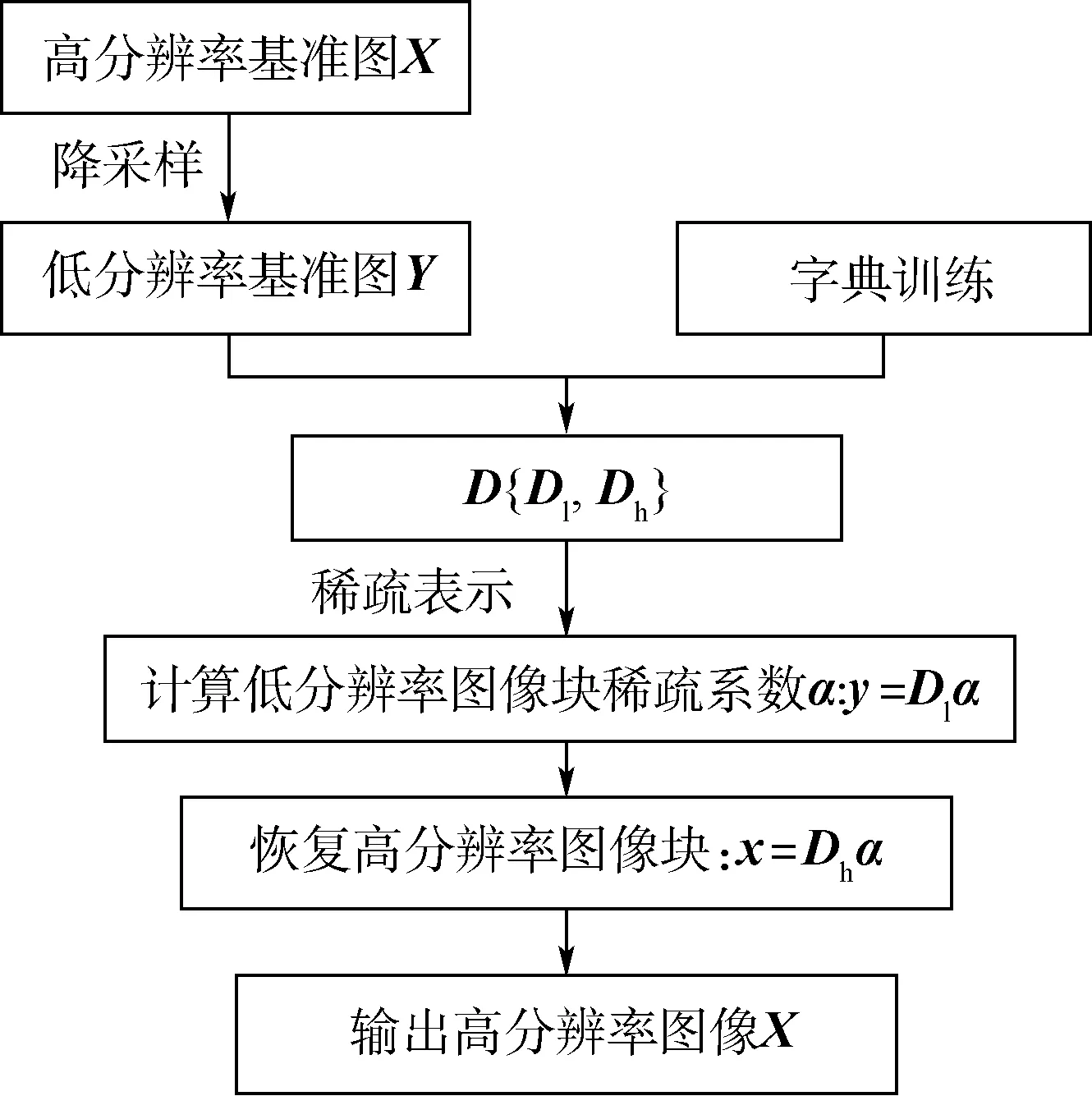
图2 基于稀疏表示和字典学习的地磁基准图超分辨率重建方法流程Fig.2 Flowchart of super-resolution geomagnetic reference map reconstruction method based on sparse representation and dictionary learning
3 稀疏字典
3.1 字典初始化
在训练稀疏字典之前,利用地磁场模型的先验信息进行字典的初始化。 由于实际采集到的地磁场信息不是均匀分布的,首先对目标区域地磁场进行建模,而后根据所建模型对基准图进行网格化处理。 实际磁测数据可由式(13)进行分解:

式中:BR为地磁剩余磁场值;B0为地磁场实测数据;BC为通过国际地磁参考场(IGRF)计算的理论值。 通过式(13)可以获取目标区域的剩余磁场值。 在近年来的研究中,对地磁场的建模主要采用球谐分析(SHA)和矩谐分析[21];由于研究的区域面积较小,地球曲率对模型的影响可以忽略不计,选择采用矩谐分析进行目标区域地磁剩余场BR建模,具体方法如下。
在一个没有磁场源的空间内,目标磁位能够通过拉普拉斯方程获取:
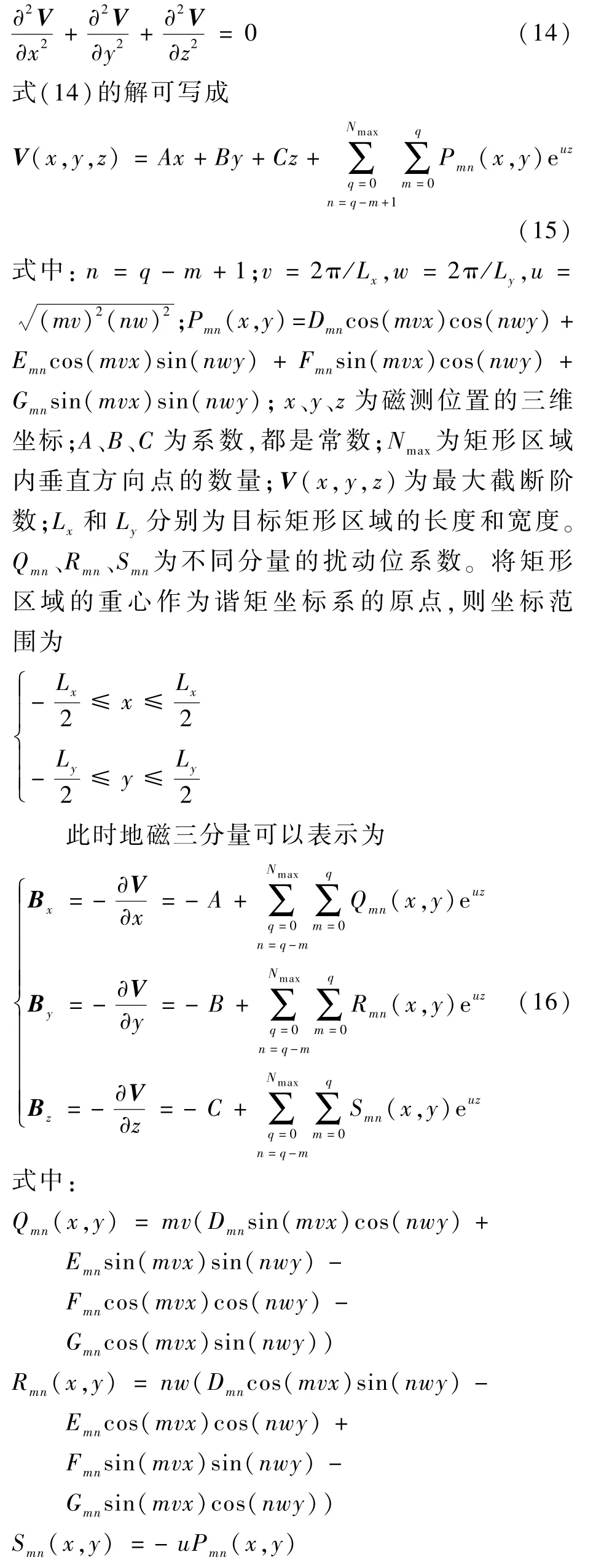
因此,总场强度可以表示为

通过上述方法,可以建立地磁剩余场模型,同时获取精确的网格化数据。 使用的稀疏字典由512 个特征列向量构成,其中一半由地磁剩余场网格化数据随机抽取组成,另一半由国际地磁参考场数据随机抽取组成。 最终生成的矩阵作为字典训练的初始字典。
3.2 字典训练
为使稀疏表示达到最好的效果,过完备字典的获取是最为重要的步骤。 通过训练低分辨率和高分辨率基准图对应的字典,能够使高分辨率和低分辨率基准图具有相同的稀疏表示。
稀疏字典一般分为2 种:基于特定结构的稀疏字典和基于学习的稀疏字典。 基于特定结构的字典包括高斯随机矩阵、循环矩阵、范德蒙矩阵等。 这些字典最大的优势是稀疏表示时计算速度很快(时间复杂度为ο(nlogn)),但是同时也限制了对于信号的稀疏表示能力。 因此,这类方法一般只对特定种类的信号有较好的效果。 基于学习的方法通过对训练数据集进行学习得到低分辨率和高分辨率地磁基准图的最优稀疏基,从而达到充分表示原始信号的目的[22]。
文献[23]将K-SVD 算法应用到图像去噪中并取得了很好的效果。 本文采用K-SVD 算法进行低分辨率和高分辨率稀疏字典的学习。 利用Frobenius 范数来衡量原图像和稀疏分解后图像的偏差,保持稀疏矩阵中除第j0列以外所有列不变,提取出第j0列后问题可写成
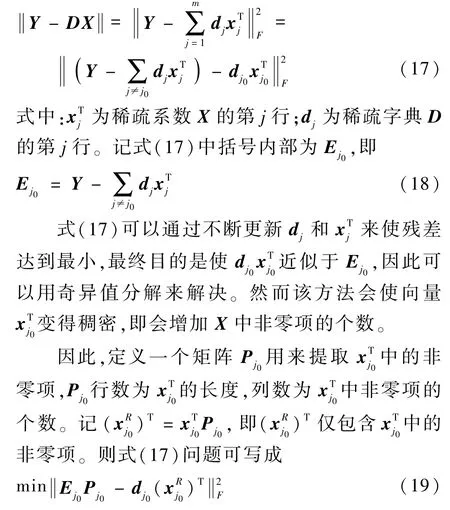

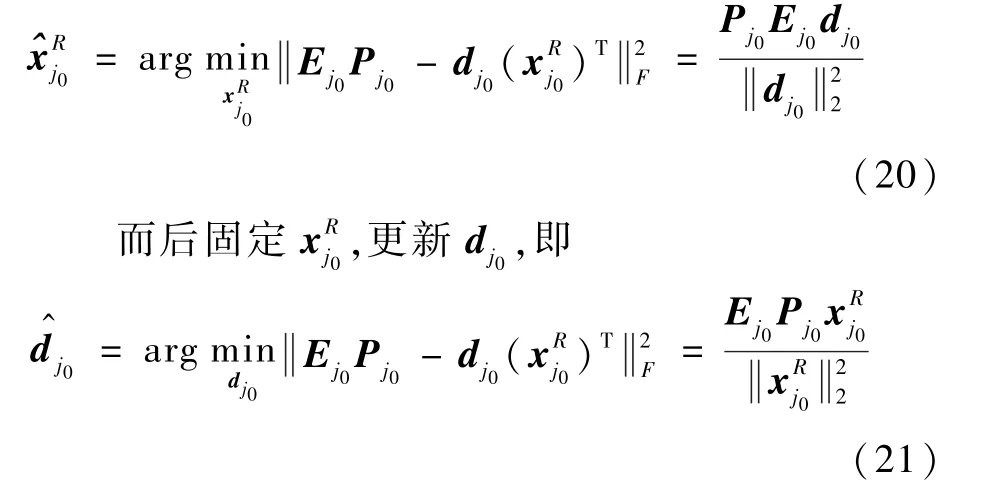
交替迭代数次后即可满足目标要求,具体流程如图3 所示。
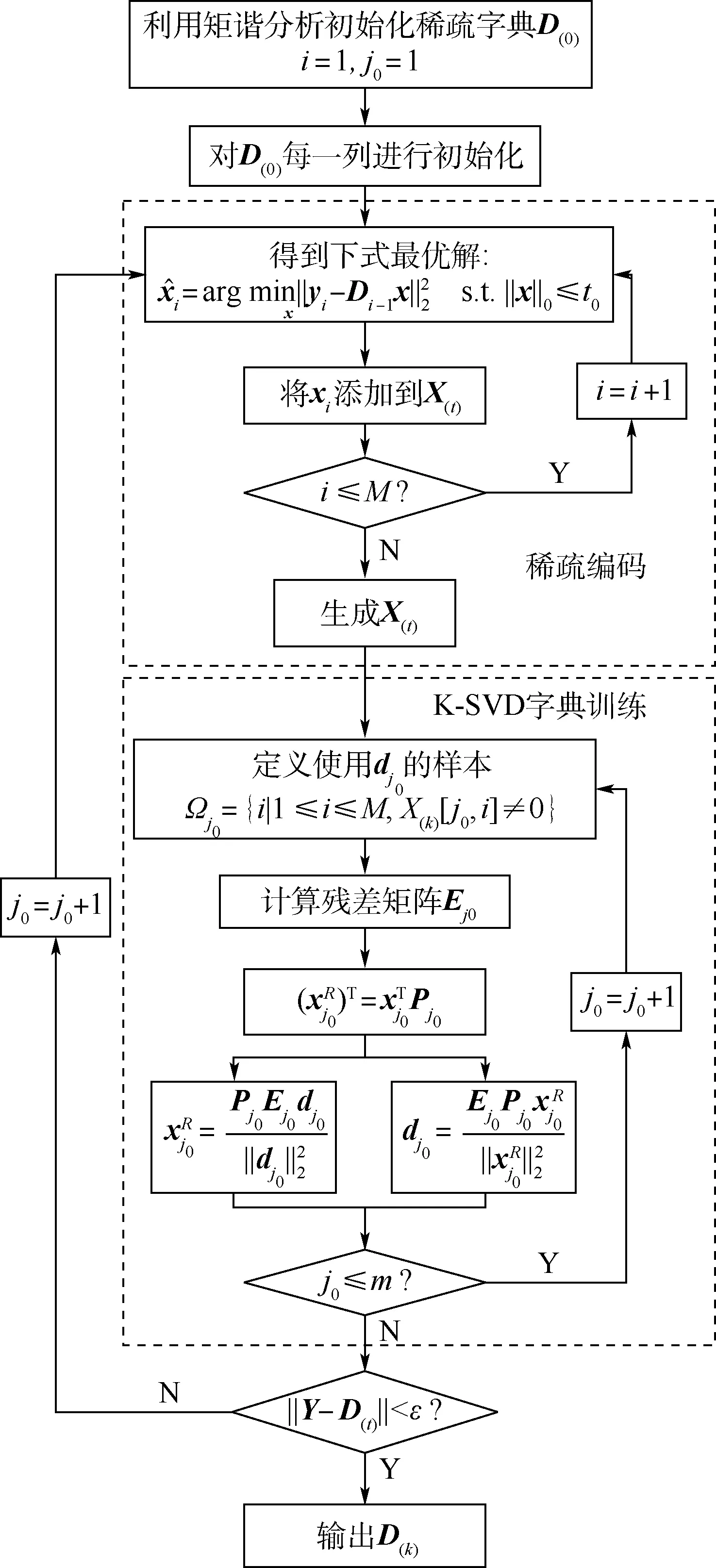
图3 K-SVD 算法流程Fig.3 Flowchart of K-SVD algorithm
4 仿真结果和性能分析
实验所使用的地磁数据集来源于笔者课题组获取的2009 年东亚地区地磁场以及国际地磁参考场。 比较了本文方法和多种得到广泛应用的插值法和图像超分辨率重建方法在地磁基准图构建中的实际效果,包括双三次插值、PSO-Kriging 插值、相邻嵌入法(Neighbor Embedding, NE)等。
首先,为方便后续处理,将所有地磁数据压缩到[0,255]范围内,方法如下:

式中:ti为地磁基准图中的元素;Max 和Min 分别为所有地磁数据的最大值和最小值。
在实验中,输入的地磁基准图分辨率分别被提高到2、3 和4 倍,使用的图像块大小为5 ×5,以保证相邻图像块之间有4 个像素的重叠部分。在从低分辨率基准图中提取图像块前,首先,对低分辨率基准图进行双三次插值以保证与高分辨率基准图大小相同;其次,对处理后的低分辨率基准图计算其稀疏字典对应的稀疏系数;最后,利用相同的稀疏系数和高分辨率字典得到重建后的高分辨率基准图。 文中所用字典通过随机选取的50 000 个地磁图像块训练得到。 通过交叉验证,最终选取λ=0.2,随机选取500 幅基准图作为实验测试集[24-25]。
4.1 重建效果对比
为验证生成的高分辨率地磁基准图的质量,利用峰值信噪比、结构相似度(SSIM)和均方根误差作为评价指标,对通过式(1)计算得到的总场强度进行评价。 图4 为不同方法的重建效果对比。可以看出,利用本文方法构建的高分辨率基准图与原始图最为相近,且细节部分重建效果最好。
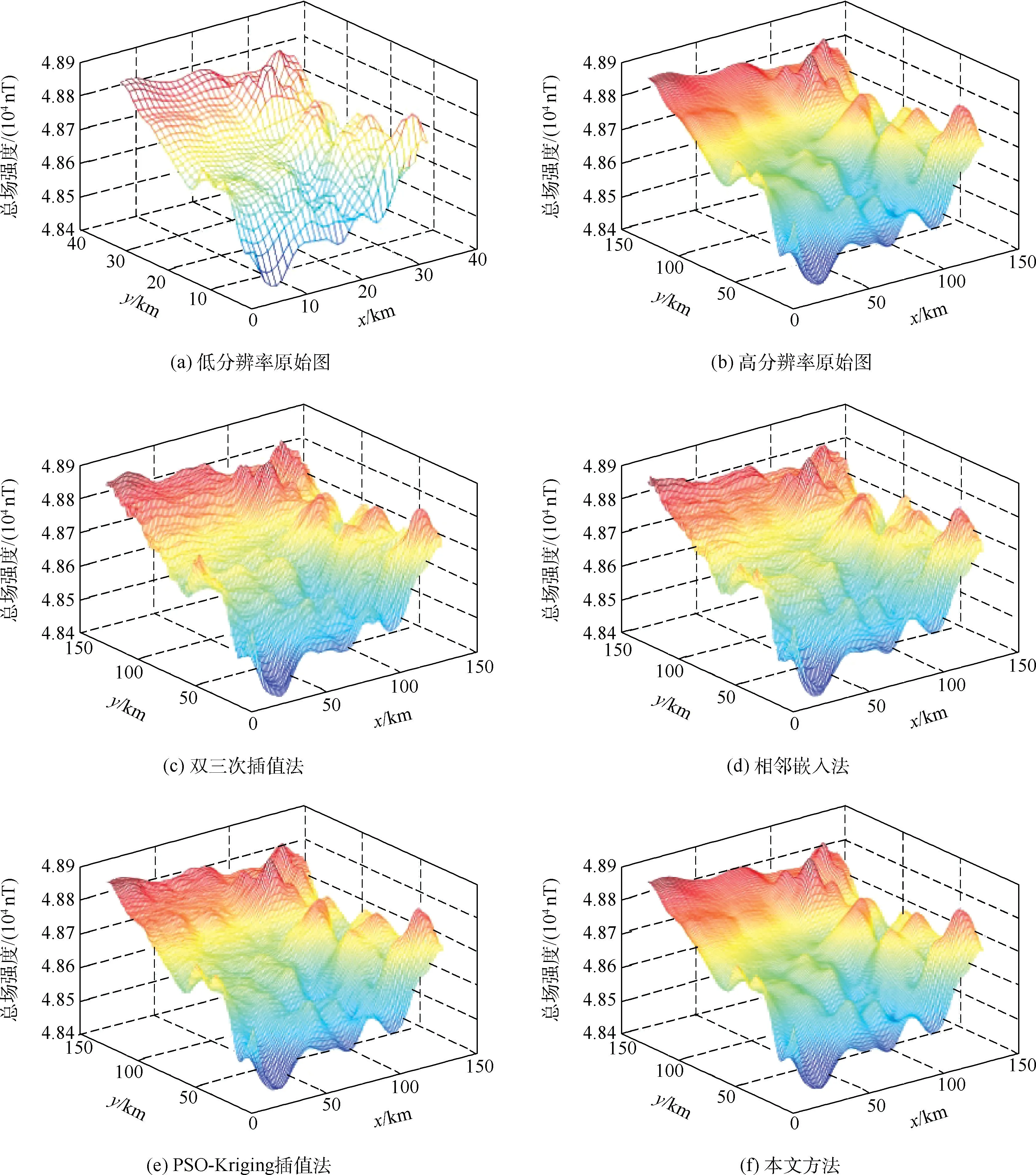
图4 四倍放大倍数下地磁基准图重建效果对比Fig.4 Comparison of geomagnetic reference map reconstructed with magnification factor 4
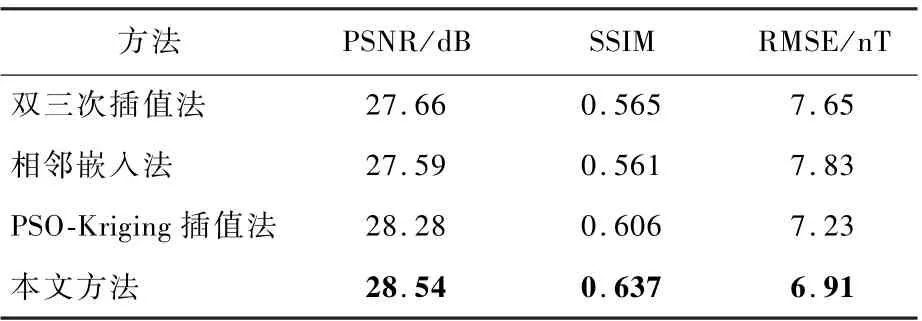
表2 三倍放大倍数下不同方法PSNR、SSIM 和RMSE 指标对比Table 2 Comparison of PSNR, SSIM and RMSE of different methods with magnification factor 3
表1 ~表3 为各种基准图构建方法在不同分辨率方法倍数下3 种指标评价结果,表中加粗数据为本文方法的仿真结果。 可以看出,各种指标下本文方法均优于其他方法,且放大倍数越大,优势越明显。

表1 二倍放大倍数下不同方法PSNR、SSIM 和RMSE 指标对比Table 1 Comparison of PSNR, SSIM and RMSE of different methods with magnification factor 2
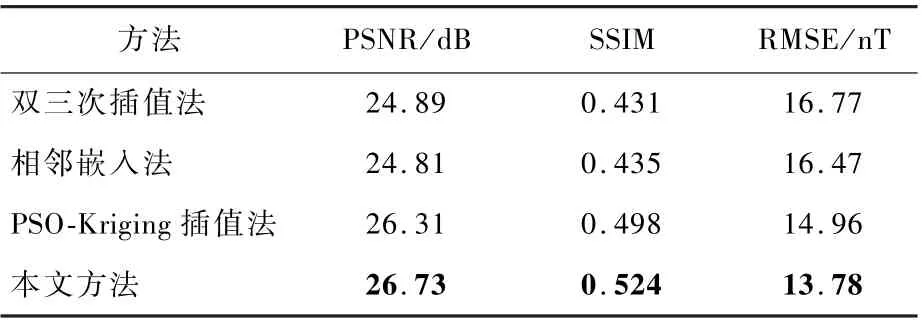
表3 四倍放大倍数下不同方法PSNR、SSIM 和RMSE 指标对比Table 3 Comparison of PSNR, SSIM and RMSE of different methods with magnification factor 4
4.2 字典初始化效果分析
在上述实验中一直使用含有50 000 图像块的数据集进行字典训练,为验证文中字典初始化的实际效果,选取大小为1 600,3 200,6 400,12 800,25 600 和51 200 的图像块集进行字典训练。 图5 ~图7 分别为3 种评价指标下使用本文方法进行初始化以及利用高斯随机矩阵进行初始化的实验结果。 可以看出,在3 种评价指标下,文中初始化方法都能够使用更小的训练数据量达到更高的重构精度。

图5 三倍放大倍数下训练数据集大小对有/无先验信息字典重建基准图PSNR 值的影响Fig.5 Effect of training dataset size on reconstructed reference map PSNR of dictionaries with and without priori information with magnification factor 3
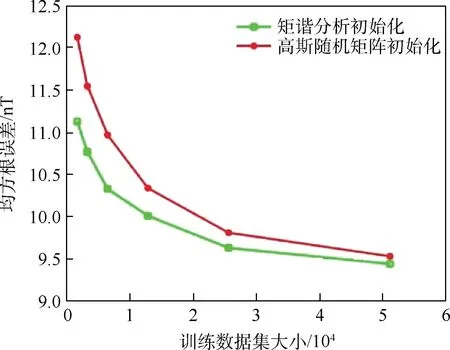
图7 三倍放大倍数下训练数据集大小对有/无先验信息字典重建基准图RMSE 值的影响Fig.7 Effect of training dataset size on reconstructed reference map RMSE of dictionaries with and without priori information with magnification factor 3
4.3 噪声鲁棒性分析
为验证本文方法对于噪声的鲁棒性,对原始基准图添加不同等级的高斯白噪声,对于3 倍的基准图分辨率放大倍数,噪声的标准差σ设置为3 ~12 nT,实验结果如表4 ~表6 所示,表中加粗数据为本文方法的仿真结果。 可以看出,本文方法对噪声的鲁棒性要优于其他方法。
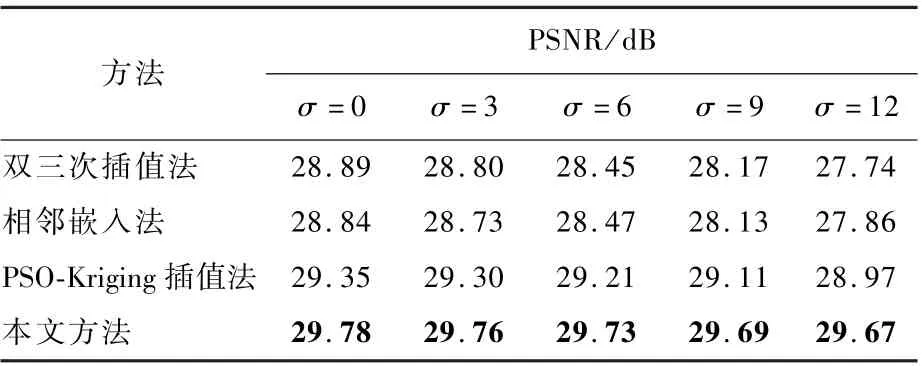
表4 不同噪声等级下各种方法PSNR 值对比Table 4 Comparison of PSNR of different methods under different noise levels

表6 不同噪声等级下各种方法RMSE 值对比Table 6 Comparison of RMSE of different methods under different noise levels

图6 三倍放大倍数下训练数据集大小对有/无先验信息字典重建基准图SSIM 值的影响Fig.6 Effect of training dataset size on reconstructed reference map SSIM of dictionaries with and without priori information with magnification factor 3
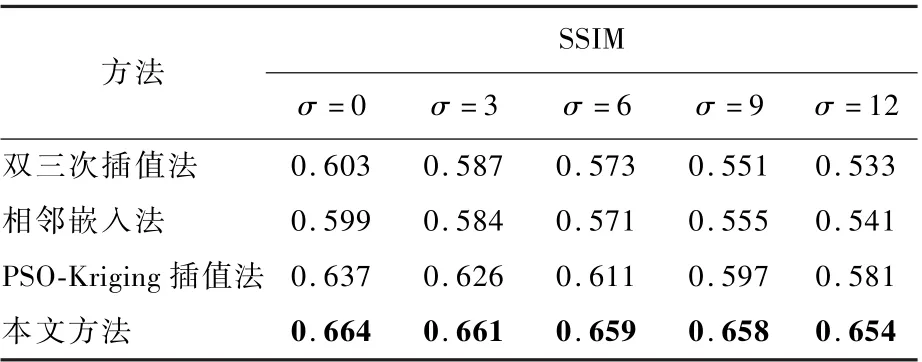
表5 不同噪声等级下各种方法SSIM 值对比Table 5 Comparison of SSIM of different methods under different noise levels
5 结 论
本文提出了一种基于稀疏表示和字典学习的高精度地磁基准图构建方法,利用矩谐分析进行稀疏字典的初始化,利用K-SVD 算法进行字典训练,得出如下结论:
1) 稀疏表示在地磁基准图构建中能够取得较好的效果。
2) 基于矩谐分析的字典初始化方法能够有效减小所需训练集大小,并提高字典性能。
3) K-SVD 算法能够有效提高针对地磁基准图的稀疏字典训练效率。
4) 在不同的分辨率放大倍数下本文方法均优于其他对比方法。
在未来的工作中,将继续研究地磁场三分量之间的结构关系,从而进一步提高对噪声的抗干扰能力,提高基准图构建精度,并将该方法应用到实际地磁基准图构建应用中。
猜你喜欢
作物学报(2022年9期)2022-07-18
中国典型病例大全(2022年12期)2022-05-13
健康体检与管理(2021年10期)2021-01-03
读者·校园版(2020年19期)2020-09-16
好日子(下旬)(2020年6期)2020-08-04
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
计算机应用(2016年10期)2017-05-12
读者·校园版(2015年7期)2015-05-14
