整车扫描技术的研究与应用
2021-09-10 15:09刘海波杨付四陈刚孙忠武
家园·电力与科技 2021年4期
刘海波 杨付四 陈刚 孙忠武

摘要:目前市场上整车扫描大体分为自动机器人和人工手持式扫描,对于研发单位主要使用人工手持式扫描设备为主。不管使用市场上哪一类型的手持式扫描仪对整车进行扫描,由于扫描的车型高低、大小不同都会存在一定的局限性,导致整车扫描的工时过多或场地不足。本文通过研究市场上主流的手持式人工扫描设备,在扫描整车时的优劣性进行分析。研究出一套针对不同车型的整车扫描的方案。对场地、工时和成本进行有效控制。
点云数据:是通过使用测量仪器扫描产品及其组成部分的表面,得到的点数据集合,每个点包含有三维坐标、反射强度、或色彩特征等信息。
定位坐标点:指粘贴在被扫描工件表面用于确定扫描三维图像空间关系的标记点。
基准点:扫描大件的多面体结构时,为了使两个或两个以上的面在同一基准上进行的扫描,设置的共用点。
前言
对于人工手持式扫描的设备,目前市场上大多采用激光技术,各种设备对于扫描整车来说或多或少都有一定的局限性,一个是单幅扫描区域的局限,扫描区域越小就会贴更多的目标点(手持式需要粘贴2000多个目标点),贴的目标点越多,对于成本和工时(包括撕点)也会消耗越多。相反扫描区域或识别区域越大,对于场地的要求也会越大(拍照或者接受点距离2米左右),所以我们根据设备的优点,不同厂家不同大小的设备配合使用,提出一套较优的整车扫描方案。
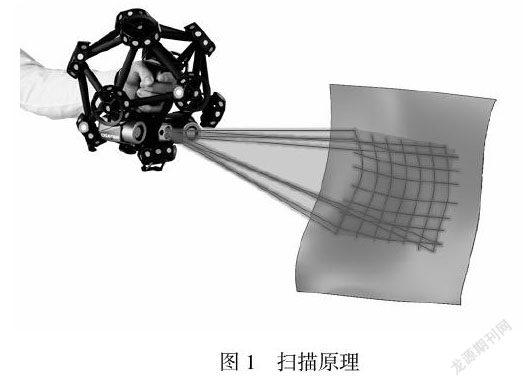
1 手持式激光扫描原理
扫描仪上的相机获得投影到被扫描物件的激光,该激光会随物件的形状发生变形,通过计算获得激光线所投影的线性三维信息。扫描仪再根据固定在物件表面的定位标识点来定位扫描仪在扫描过程中的空间位置,这些空间位置被用于空间位置转换。当扫描仪移动时,不断获取激光所经过位置的三维信息,从而形成连续的三维数据。
2 扫描设备优缺点
目前国内外扫描设备厂家较多,每套设备来说各有优劣势。我们将扫描仪的识别区域的大小,分为大设备和小设备两种。
比如大设备:贴定位标识点较少,直接录点不用经过保存转化。缺点:車身较高的车型来说(SUV、MPV)车顶的基准点较难放置和录取;需要较大的场地和良好的视野,6/7座车型的第三排座椅、地毯和假人扫描无法扫描。
第二种小设备:使用空间小,灵活。缺点:扫描识别区域较小,需要粘贴更多的标识点来定位,增加贴点撕点的工时和成本。
两种设备之间是否可以优劣互补呢?用大设备录点用小设备来扫描、用小设备拍照用大设备扫描或者大设备与大设备之间小设备与小设备之间相互取长补短呢?
3 整车扫描原理分析及验证
我们将整车扫描流程进行分析:
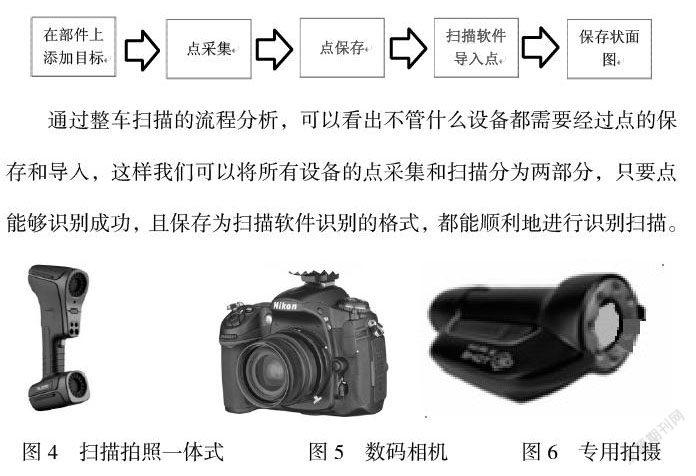
通过整车扫描的流程分析,可以看出不管什么设备都需要经过点的保存和导入,这样我们可以将所有设备的点采集和扫描分为两部分,只要点能够识别成功,且保存为扫描软件识别的格式,都能顺利地进行识别扫描。
我们将不同厂家和不同录点的设备进行试验,1、扫描拍照一体式,2、数码相机,3、专用拍摄仪进行录点,验证了以上推理。但是在点的格式转化时,或者在另一台设备上识别扫描时会不会有精度损失,损失的精度能否满足我们整车扫描呢?还需进行一般验证。
4 精度验证
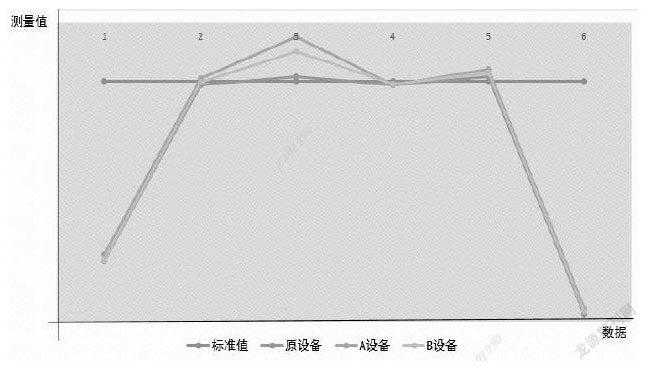
在车身前端放置两颗标准球,首先以最短距离(不超过1米)多次扫描出两个球的球心距离,取其平均值,作为标准值,再沿着一个球的一侧进行拍照,另一个球结束。将拍照完后的点分别用原套设备、其他公司的A设备、B设备分别进行扫描,测量球距离。
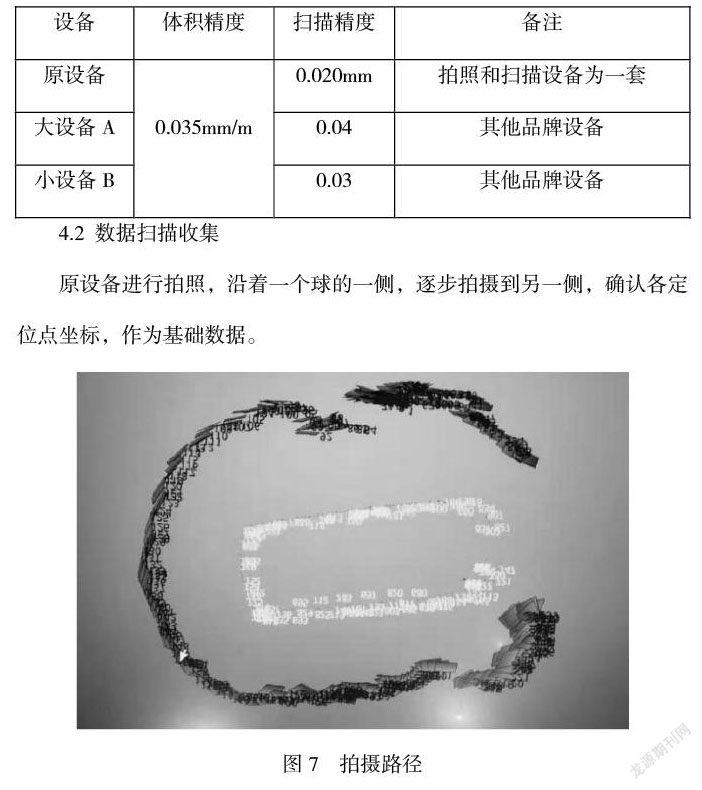
4.1各设备精度
4.2 数据扫描收集
原设备进行拍照,沿着一个球的一侧,逐步拍摄到另一侧,确认各定位点坐标,作为基础数据。
1)用原设备扫描多次得出数据。
2)将拍摄坐标点导入到其他公司设备A,再扫描多次得出数据。
3)将拍摄坐标点导入到其他公司设备B,再扫描多次得出数据。
经过试验沿着12米的路线进行扫描,误差±1毫米之内,对于整车扫描来说该误差可以接受。通过以上实验得出以下结论:
1)拍摄后的坐标点,能够在大多数不同厂家的设备上进行使用(只要格式可以识别)。
2)拍摄的坐标点精度不会根据格式的变动改变,也不会导入到其他厂家的设备而改变。
3)按理在使用同一拍摄的坐标点时,扫描的精度取决于扫描仪的扫描精度,其他因素不变的情况下,扫描仪的精度越高扫出的3D图形精度越高,反之亦然。
点在录取和拍摄中,根据标尺或整车点进行误差均分,不会存在误差应扫描路线而积累,所以当点的坐标固定,在其他因素(环境、人员等)三维扫描的精度就只与扫描设备有关。
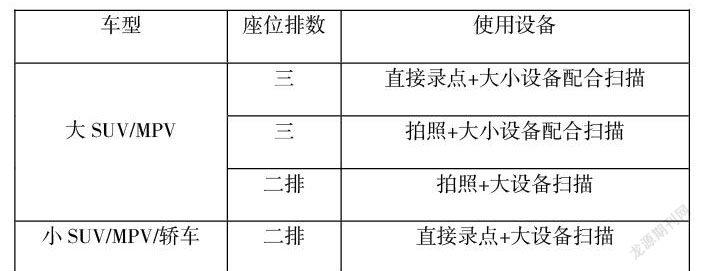
5 实际应用
在整车扫描中,整车扫描以大设备为主,可以贴较少的点,至于采用直接录点和拍照录点还需要根据车身的高度进行判断,如果车身较高,难以放置和录取基准点,就用拍照+点识别方式;如果车身较低想要识别区大贴点扫那么就需要使用到接收器,但是对于第三排座椅来说,由于车门开度有限扫描头无法连接到接收器,这是就需要大小设备进行配合使用。
参考文献:
[1]罗先波、钟约先、李仁举、三维扫描系统中的数据配准技术。清华大学报:自然科学版,2004。张结实、李玉杰、肖瑶、关节臂式坐标测量系统整车扫描方案优化,中国新技术新产品 2019。
[2]严丽萍、浅析三维激光扫描技术的应用于发展,创新与实践2019。
作者简介:刘海波,1984.2,男,汉族,四川;本科,工程师,一直从事汽车制造和研究行业至今,编制多篇公司的相关制度和指南等。
广州汽车集团股份有限公司汽车工程研究院 广东广州 511400
猜你喜欢
林业科技(2022年2期)2022-04-27
职工法律天地·上半月(2021年1期)2021-06-23
职工法律天地·上半月(2020年1期)2020-03-02
学校教育研究(2019年19期)2019-11-23
计算机与网络(2019年10期)2019-09-10
中国动物保健(2015年4期)2015-10-21
少年科学(2015年8期)2015-08-13
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14
计算机世界(2009年35期)2009-11-17