
“ 1+X ”《特殊焊接技术》教材点焊机器人模块的研究与开发
2021-09-10 07:22:44刘伟李亚展吴忠友
电焊机 2021年5期
刘伟 李亚展 吴忠友

摘要:对“ 1+X ” 《特殊焊接技术》教材的研究开发背景、目的意义、内容架构及主要特色进行了介绍,围绕以专业知识为基础,以项目应用为导向,以专业技能为核心的编写原则,充分体现职业技能认知规律和技能等级逐级递进的特点。指出焊接机器人的广泛应用深刻地改变着焊接产业发展布局,随着汽车生产行业的快速发展,对点焊机器人设备和技能人才需求不断提高,因此,开展“ 点焊机器人 ”模块内容的研究与开发,对于加快职业院校点焊机器人技术技能人才的培养具有重要的指导作用。
关键词:1+X;特殊焊接技术;点焊机器人
中图分类号:TG409 文献标志码:B 文章编号:1001-2003(2021)05-0030-04
DOI:10.7512/j.issn.1001-2303.2021.05.06
0 前言
所谓“ 1+X ”证书泛指:“ 1 ”为学历证书,“ X ”为若干职业技能等级证书。把学历证书与职业技能等级证書结合起来,体现了职业教育作为一种类型教育的重要特征,是落实立德树人根本任务、完善职业教育和培训体系、深化产教融合校企合作的一项重要制度设计。
1 “ 1+X ”特殊焊接技术教材开发背景
1.1 国家政策导向
2019年2月,国务院发布了《国家职业教育改革实施方案》[1],首次提出启动“ 1+X ”证书制度试点工作,开启了我国职业教育人才培养模式和评价模式创新发展的新阶段。为贯彻落实“ 方案 ”的相关要求,教育部等四部门联合印发了《关于在院校实施“ 学历证书+若干职业技能等级证书 ”制度试点方案》。
1.2 教材开发的依据
按照教育部的要求,中国船舶工业集团公司科普教育中心、中船舰客教育科技(北京)有限公司作为经国务院职业教育国际联席会议批复职业教育培训评价组织,组织行业龙头企业的焊接专家、院校焊接教育专家,以2019年9月教育部颁布的《特殊焊接技术职业技能鉴定标准》为依据,按照“ 1+X ”特殊焊接技术职业技能等级要求,进行活页式教材的开发。
笔者作为“ 点焊机器人 ”模块的主编,完成了(中级)和(高级)模块相关内容的撰写工作。
1.3 教材开发的意义和作用
(1)满足点焊机器人技能岗位需求。
近年来,由于人们对传统焊接作业从业意愿急剧下降,职业院校焊接专业生源逐年减少,造成焊接岗位人员数量和质量都难以满足企业需求。例如:我国汽车车身及零部件生产一直是手工操作的悬挂式点焊和专机自动焊占据焊接生产的主导地位,劳动强度大,作业环境恶劣,焊接质量不易保证,而且生产的柔性也很差,无法适应现代汽车生产的需要。随着焊接机器人等先进自动化设备的出现,加速了产业结构调整和设备的升级换代步伐,对点焊机器人技能岗位人员的需求尤为迫切。
(2)解决点焊机器人教学资源匮乏。
我国点焊机器人约占焊接机器人总数的46%[2],然而,国内的职业院校和培训机构普遍存在“ 重弧焊 ”“ 轻点焊 ”[2-3]现象,使得点焊机器人的教学资源非常稀少,给教学带来困难。因此,点焊机器人操作及应用教学资源亟待开发。
(3)构建现代焊接技术职业教育体系。
2018年10月,教育部关于印发《中等职业学校焊接技术应用专业实训教学条件建设标准》[4]等11项职业教育教学标准的通知【教职成函〔2018〕 8号】,其中包括《高等职业学校焊接及自动化专业实训条件建设标准》[5],提供了设备清单,有效地促进了“ 1+X ”特殊焊接技术职业技能等级证书试点工作的顺利开展,对深化焊接专业内涵建设以及焊接专业复合型技术技能人才培养、评价模式的改革以及完善现代焊接技术职业教育体系,优化现代焊接技术职业教育结构具有十分重要的意义。
2 “ 1+X ” 《特殊焊接技术》教材内容
2.1 基本结构
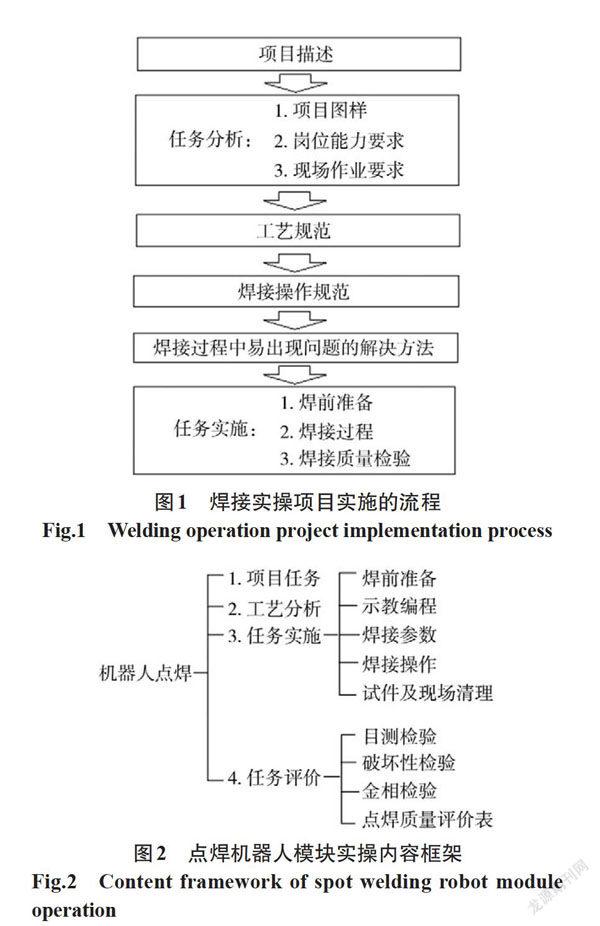
全书由基础知识、初级、中级、高级四部分组成,每部分又分为实操篇和应用篇。以初级为例,实操篇包括:焊条电弧焊技能训练、熔化极气体保护电弧焊技能训练、钨极氩弧焊(TIG焊)技能训练和火焰钎焊技能训练模块;应用篇则列举了实际生产中焊条电弧焊、熔化极气体保护焊、钨极氩弧焊和火焰钎焊等应用实例。焊接实操项目实施流程如图1所示。
2.2 点焊机器人实操内容框架
焊接机器人课程内容根据实操等级的相关知识和技能要求,按照先弧焊模块、后点焊模块的顺序依次递进。“ 点焊机器人 ”模块分为中级和高级。以点焊机器人模块(中级)内容为例:需掌握运用插补指令进行点焊机器人示教和编程;实施对碳钢板搭接、叠接作业。点焊机器人模块实操内容框架如图2所示。
2.3 点焊机器人模块考评项目
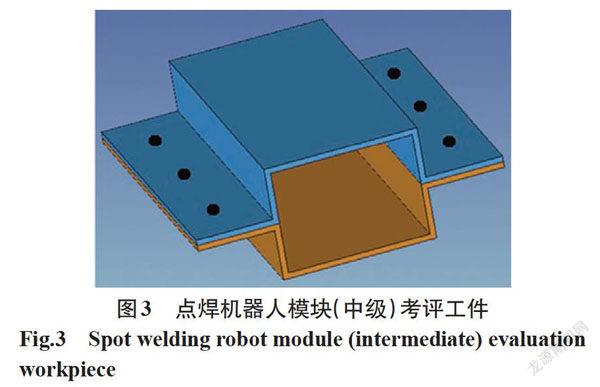
点焊机器人模块(中级)考评工件材质为低碳钢,槽盒形状。针对焊点的位置、间距,以及焊点直径和强度进行考评,如图3所示。
点焊机器人通过一把气动C型点焊钳对工件实施点焊[6],焊钳的移动轨迹及示教点位置示意如图4所示。
图中,P1~P4为示教点顺序:P1—机器人待机点,P2—接近点,P3—第一个焊接点(该点要调用焊接控制器设定的焊接循环参数程序),P4—第二个焊接点(该点要调用焊接控制器的点焊参数),然后,机器人沿安全路径返回待机点(图略)。焊接后,根据评分标准对焊点质量进行评判。
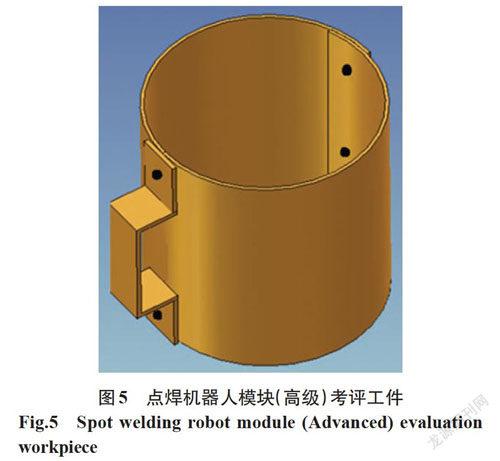
点焊机器人模块(高级)考评工件则选用不锈钢材质,杯子形状,增加了焊接难度和焊接位置难度,如图5所示。
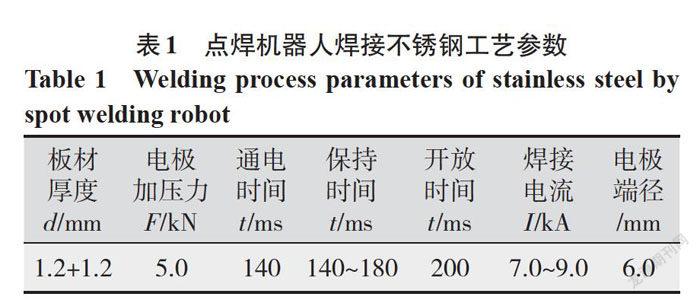
图中材质为308不锈钢(国标牌号:06Cr20Ni11),板厚为1.2 mm,搭接点焊。首先对点焊机器人焊接不锈钢工艺进行分析,确定工艺参数,如表1所示。
焊接操作步骤:先将不锈钢板卷成筒状做成杯身,在杯身接合部位的搭接面进行焊接(3点),再将杯身与杯子把手(2点)焊接在一起。
2.4 点焊机器人应用案例
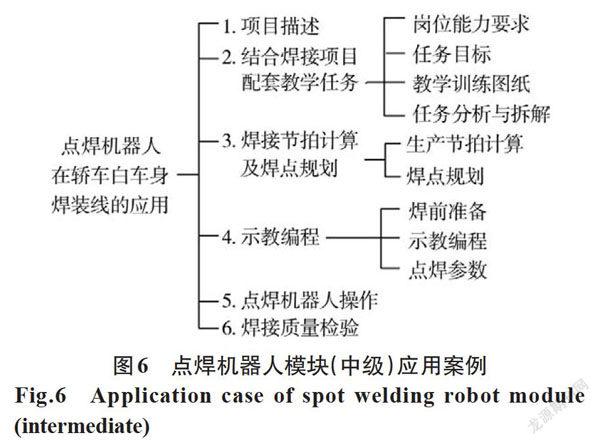
点焊机器人模块(中级)应用案例遴选了“ 机器人在轿车白车身焊装线的应用 ”,内容框架如图6所示。
点焊机器人模块(高级)应用篇遴选的是“ 不锈钢电梯层门板机器人点焊 ”案例,重点掌握不锈钢的机器人点焊工艺。
3 教材特色
3.1 创新性强
(1)体现书证融通性。反映特殊焊接技术职业岗位能力要求,与中、高职院校的相关专业课程有机衔接,实现书证融通,以满足“ 教、学、考 ”合一的需要。
(2)采用最新国家标准。法定计量单位和最新名词术语,形成本教材的一个新的特色。
(3)体现实用性和先进性。教材内容选取以适用性和先进性为原则,以教、学、考必需,够用为度,同时注重知识的先进性,体现焊接新技术、新工艺、新方法、新标准、新技能[7],以适应职业和岗位的变化,有利于提高学生可持续发展能力和职业迁移能力。
(4)突出理論与实践一体。教材编写突出理论与实践的紧密结合,注重从理论与实践结合的角度阐明基本理论以及指导实践。以初级为例,除详述了四种焊接方法(SMAW、GMAW、GTAW、TS)[8]基础知识与基本操作技能外,还精选了四种焊接方法在生产实践中的应用案例,有利于培养学生发现问题、分析问题与解决问题的能力。
(5)教材新形态。采用项目—任务式结构,每种焊接方法为一个项目,每一个项目下按由易到难的原则列举了若干个技能操作任务,符合学生的认知规律和技能形成规律。还用“ 师傅点拨 ”或“ 安全提示 ”等插图(文),图文并茂、简明扼要、通熟易懂。
3.2 实操性强
(1)标准化的实操步骤。
教学活动是由“ 教 ”与“ 学 ”构成的,点焊机器人操作是基本技能,但务必与焊接工艺相结合。如在操作前先对工件进行工艺分析,然后根据焊接位置进行焊钳的示教点路径规划,一步一图,使点焊机器人编程及焊接操作过程标准化。
(2)将典型应用变作实操项目。
运用生产过程常见的点焊生产案例作为实操内容[9],并对点焊效果进行分析研究与评价。编者通过与安川、KUKA等机器人生产制造商以及汽车生产企业机器人操作人员进行交流,确定相关知识与技能操作内容,总结出符合生产要求的实操步骤,提高学生的实际操作能力和工艺运用能力。同时指出:点焊接机器人操作技能不仅是工业机器人和焊接系统的简单结合, 而是从设计、工艺、流程等多个维度开展的焊接技术重构[10],从而深化学生对于点焊机器人操作技能的理解与应用。
3.3 通用性强
“ 1+X ”《特殊焊接技术》教材点焊机器人模块选择了不同品牌的机器人,在中级和高级部分先后列举安川和KUKA机器人[11],分析不同品牌机器人的编程语言及操作特点,便于实际应用中进行参照和比较。
由于点焊机器人系统通常是将不同生产厂家的部品组合在一起,如机器人、一体式焊钳(含变压器)、焊接控制器等,型号繁多,因此,在立足于对教学资源进行全面、有效整合的基础上,应结合教学实际需求,有目的地选择最适宜的点焊机器人系统,从而使点焊机器人的学习内容能融合不同品牌机器人操作特点及焊接工艺。
3.4 应用性强
工业机器人在汽车生产的冲压、焊装、涂装、总装四大生产工艺过程有广泛应用,而点焊机器人占总焊接量90%以上,每辆汽车车身上大约有3 000~4 000个电阻点焊焊点[12],对焊接质量要求很高。教材针对性地选取了点焊机器人在汽车行业生产案例,并参照了生产作业指导书的要求。
4 结论
“ 1+X ”证书制度是一种面向职业院校校学生的新型人才评价体系,职业院校应根据“ 1+X ”证书制度的实施要求,积极开展人才培养模式、培养方案的创新探索,系统梳理各学科专业人才培养的目标和定位,结合“ 1+X ”证书制度重构人才培养模式,重新修订人才培养方案,明确各专业的职业技能等级证书组合系列,为教学体系的重塑指明方向,为学生的学习规划和职业发展规划提供科学指导,做到以证促改、以证促学。
参考文献:
国家职业教育改革实施方案(国发[2019] 4号)[EB/OL]. http:
//www.gov.cn/zhengce/content/2019-02/13/content_5365341.htm1.
刘伟,周广涛,王玉松.焊接机器人基本操作及应用(第二版)[M].北京:电子工业出版社,2015.
杜志忠,刘伟.点焊机器人系统及编程应用[M].北京:机械工业出版社,2015.6.
中等职业学校焊接技术应用专业实训条件建设标准[S].教育部.2018.10.
高等职业学校焊接及自动化专业实训条件建设标准[S].教育部.2018.10.
吴九澎,陈树君.焊接机器人实用手册[M].北京:机械工业出版社,2014.5.
刘伟,周广涛,王玉松.中厚板焊接机器人系统及传感技术应用[M].北京:机械工业出版社,2013.
刘伟,李飞,姚鹤鸣.焊接机器人编程及应用专业术语英汉对照[M].北京:机械工业出版社,2019.
杜志忠,刘伟.机器人焊接编程与应用(“ 十三五 ”职业教育国家规划教材)[M].北京:机械工业出版社,2019.
刘伟,林庆平,纪承龙.焊接机器人离线编程及仿真系统应用[M].北京:机械工业出版社,2014.
刘伟,李飞,姚鹤鸣.焊接机器人操作编程及应用(ABB等五品牌)[M].北京:机械工业出版社,2017.
刘伟,郭广磊.焊接机器人系列教材开发与应用[J].亚太教育,2016(31):280-281.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 10:04:42
摄影与摄像(2020年11期)2020-09-10 07:22:44
小天使·五年级语数英综合(2019年8期)2019-08-27 15:27:52
艺术品鉴(见今)(2017年3期)2017-05-15 07:17:39
当代音乐(下旬刊)(2016年5期)2016-05-30 01:14:23
焊接(2016年5期)2016-02-27 13:04:46
焊接(2015年6期)2015-07-18 11:02:24
焊接(2015年8期)2015-07-18 10:59:12
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
