
预测控制在永磁同步电机控制系统中的应用
2021-09-10 08:36韦国长
电子元器件与信息技术 2021年6期
韦国长
(广西城市职业大学,广西 崇左 532200)
0 引言
PMSM的结构精简、体积小、功率大、运行惯量低等,由PMSM构成的伺服结构于航空航天、以及机器人等领域取得了普遍使用。PMSM 一般选择矢量控制手段,因PMSM特殊的非线性特点,当产生参数改变、负载扰动以及创模不正确时将降低控制质量,所以需要采取新方法提升其控制效果。
预测控制属于先进的计算机管控算法,对于模型预测控制有良好的宽容性,由此使之被普遍用在繁琐的工业过程管理方面,预测控制存在滚动优化与反馈校正等特征,所以存在强大的鲁棒性。近几年,有关PMSM预测控制的探究不断增多, 其中有些直接采取线性预测控制手段,最终效果较差,但选择神经系统预测控制手段就难以保障实时性。文章基于PMSM非线性模型,基于微分中值定理优化了非线性模型,再采取线性预测控制手段求出控制率模拟结果显示,采取这种方法创建的PMSM调速系统有显著效果。
1 PMSM数学模型与矢量管控
1.1 PMSM结构与分类
PMSM结构主要包含定子、端盖与转子等。定子选择和一般电机相似的刚叠片结构,由此保证在电机转动时降低损耗,其绕组模式能分成分布短距结构、整距结构与非规则结构[1]。转子是永磁体,永磁体原料一般选择稀土材料等生产,涉及实心与叠片两类。
PMSM按照运行形式差异能分成PMSM与无刷直流电机;按照永磁材料类型的多少,能分成单一式结构与混合式结构;按照永磁体设置位置差异,分成旋转电枢式与旋转磁极式;按照永磁体安装形式差异,能分成表贴式、内嵌式以及内装式,见图1,表贴式把永磁磁钢设置于转子铁芯表层,其d、q轴相对称,q轴与d轴电感相同,即Lq=Ld,与隐极同步电机相似。
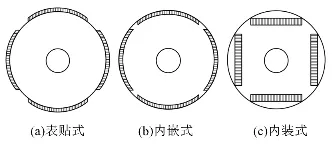
图1 PMSM 转子结构图
内嵌式和内装式的不同之处是内嵌式把永磁磁钢嵌进转子外表层,而内装式把永磁磁钢设置于转子铁芯之中,这时电机q轴电感Lq>d轴电感Ld,磁路交叉,磁路气隙不大,而且因其特别的安装形式,机械强度大,适用作高速转动。
1.2 PMSM运行原理
通过上述分析,PMSM因控制模式差异,能分成PMSM与无刷直流电机,PMSM根据正弦波形式管理,无刷直流电机根据方波形式管理[2]。所以,在探究正弦波形式管理的PMSM时,能将之看作只把电励磁换成磁体励磁的设备。当电机稳定转动且电力系统电压频率不变时,其转子速度就是一个常数,同时不受负载高低作用,即是同步运速,见式(1)所示:

式中,n表示电机运速,ns表示同步运速,f表示电力系统电压频率,Pn表示设备极对数。所以,转子磁场会和定子圆形构成旋转磁动所产生的磁场会以相同速度旋转,且产生一个气隙组成磁场[3]。气隙组成磁场和转子磁场形成作用就会出现电磁转矩,如果转子磁场超过气隙组成磁场时,转子会和形成的电磁转矩不同方向旋转,那么PMSM处在发电状态;如果转子磁场落后气隙组成磁场时,转子会和形成的电磁转矩相同方向转动,那么PMSM处在电动状态。
1.3 数学模型
精准创建数学模型是研究控制系统的前提条件,但PMSM属于一种强耦合、多输入和多非线性结构,因此在创模时,为了便于分析,一般选择简化模型:①忽视定转子铁芯阻力,忽视PMSM磁滞消耗与涡流消耗;②忽视生产工艺偏差,定子三相绕组于空间内严格根据120°对称分布规划;③永磁体磁导率=空气磁导率,能忽视电导率,其于气隙方面出现的磁场是正弦布置;④定子三相绕组于气隙方面形成的电枢反应磁场与感应电动势都是正弦布置。
2 DMC算法
预测控制属于一种依靠模型的计算机管理算法,其基本特点是借助过程模型预计系统的今后行为,其使用当下与过去的误差值和预计模型来估测过程今后的误差值,通过滚动明确当前的最好输入方法[4]。其结构如图2所示。

图2 DMC 算法结构图
预测控制方面的DMC算法是依靠对象的阶跃响应系统,创模容易,采取滚动式有限时域完善措施与实时反馈校正方法,提高了模型的鲁棒性,准确校正由于系统失配、时变以及环境影响等因素造成的不确定性。主要涉及预测系统、滚动完善、反馈校正。
2.1 预测系统
对于DMC算法,先检测对象部分阶跃响应的取样值ai=a(iT), i=1,2,...,而T表示取样周期。针对渐进可靠的对象,阶跃响应于某个时刻tn=NT后越来越稳定,导致a(i>N)和an的偏差及量化偏差和检测偏差有一样的数量级,所以能认为an已近似为阶跃响应的稳定值an=a(∞)[5]。如此一来,对象的动态数据就能够近似以有限集合{a,a2,...,an}进行描述,该集合的参量组成了DMC的系统参数,向量a={a,a2,...,an}T是模型向量,N就是创模时域。

2.2 滚动完善
k时刻的完善性能指标能取:

式中:q i、r j为权值,其分别代表对追踪偏差和控制量变化的制约。k时刻条件下,为了让J(k)是最小值,设置:

通过式(4)求出dΔu(k),...,dΔu(k+M-1)的最好值,可是DMC并不将其都作为要实现的解,仅仅取控制增量Δu(k)组成实际管理式(4)作用在被控对象上。进入下个时刻,其又出现相似的完善问题求得Δu(k+1),即“滚动优化”方法。
2.3 反馈校正
在k时刻将管理u(k)加于对象时,就像在对象输入端添加一个幅值是Δu(H)的阶跃,基于预测系统,计算在其作用下以后时刻的输出预测结果。

因实际环节有系统失配、环境影响等各种因素,通过式(5)就得的预测结果通常会与实际值存在误差,指:

DMC算法基于实时预测偏差预测今后的输出偏差,由此校正以后时刻的传输预测值,否则持续的优化将基于虚假前提[6]。因对偏差的形成缺少因果性描述,所以偏差预测仅能选择时间序列法,采取这种偏差数据用加权方式预测今后的偏差,能获得校正后的预测结果。校正后的结果经移位组成(k+1)时刻的最早预测值,整个管理过程就以此反复在线处理。
3 结束语
文章对于PMSM调速系统,制定了一种预测控制措施,经研究其数学模型且基于微分中值定理,把PMSM调速结构的非线性关系精简成时变的线性联系,进而能够依靠线性预测管理原理简单的规划控制器,模拟结果显示,本文提出的办法是有用的。
猜你喜欢
计算机仿真(2022年1期)2022-03-01
上海大中型电机(2021年1期)2021-06-09
微特电机(2021年1期)2021-01-25
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
仪表技术与传感器(2020年5期)2020-06-11
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
城市轨道交通研究(2015年5期)2015-02-27
电力自动化设备(2013年11期)2013-09-18
