
实时交通信息的车载卫星导航终端研发与中试
2021-09-10 07:22:44朱杰
交通科技与管理 2021年13期
关键词:模块化
朱杰

摘 要:本项目设计并利用历史路况信息模块、综合路况信息录入模块、Internet路况信息模块和交警交通监控数据模块、安装MNA车辆模块、浮动车数据模块等模块技术,解决了将动态导航采集、发布、应用、汽车导航、汽车安防管理、汽车娱乐等有机的整合问题,开发出实用、适用、能有效利用动态交通信息,并能有效向动态交通系统贡献数据的智能车载信息终端,车载终端能够均衡整个城市交通状态,达到最有效利用道路资源。
关键词:车载终端;浮动车数据;模块化
0 引言
实时交通信息的车载卫星导航终端产品研究及产业化一直是交通领域的研究热点问题,日、欧、美等发达的国家政府和企业投入了大量精力和资源,进行智能交通系统的研究与应用,将其作为解决大城市交通困境的有效手段。国际间通过不断的产业合作和广泛联盟,动态智能交通系统在向集成化、平台化方向发展的同时,已经在相关设施建设、终端设备销售、各类服务应用方面形成了规模巨大的产业市场。
发达国家在智能交通系统应用中已取得了大量研究经验,并从中获得显著的社会和经济效益。我国90年代开始积极跟踪国际智能交通系统领域技术的发展,经过十多年发展我国智能交通系统建设已进入发展期,在软件、产品开发、技术标准、产业化等方面都取得了相当进展。但在智能交通系统上与发达国家仍然有较大差距,面临巨大挑战。
1 研究背景及意义
1.1 日本动态信息的智能交通系统发展现状
日本早在20世纪60年代就开始了有关智能交通系统(ITS) 的研究工作,1970年在日本东京装配了车辆交通控制系统(VTCS),1973-1978 年进行了综合汽车控制系统(CACS) 的研究,1981年本田公司售出了第一套导航系统,并装配在Accord 轿车上。1987年丰田公司在Crown 轿车上使用CRT 技术来显示地图,这在汽车界是第一次。1994年1月,以民间企业和团体为主的日本道路交通车辆智能化推进协会(VERTIS)成立,成员包括与智能交通运输系统有关的学术组织、行业与机构,并与政府的相关5省厅结成联席会议制度。1996年7月5个省厅联合制定了“智能交通运输系统和系统结构的全面计划”,这一计划确定了日本智能交通运输系统研究和发展的长期目标,它包括9个发展区域和20种用户服务。其发展区域包括导航系统、电子收费系统、安全驾驶系统、最佳交通管理、提高交通管理的效率、支持公共交通、提高商业车辆的管理、支持行人和支持紧急车辆管理。作为现实建设的一个典型例子,通过提供交通信息作为导航系统的先导,车辆信息和通讯系统,也就是所谓的“VICS”,于1996年4月开始应用,并且从那时起不断扩大范围,遍布日本的高速公路和主要城市。全球交通管理系统(UTMS) 在日本已经建成,并通过VICS、定点公交车优先交通信号控制和公交优先系统来实现,1998年的横滨冬季奥运会实践验证了基于UTMS 的车辆运行管理系统。2001年由名古屋大学、日本电气株式会社(NEC)、日本电装(DENSO)、丰田、日本A- works、日本气象协会等机构组成的P- DRGS协作团体合作开发的基于浮动车的交通信息系统测试,通过对1 500多台的出租车提供的位置等数据的分析,进行配车支援,对出租车乘客提供触摸屏式信息服务。
经过近年来的不断发展和完善,VICS已经可以进行日本全国范围,多种出行信息的实时发布和服务,包括实时路况和旅行时间预测,停车场信息,交通事件和天气状况。在改善交通安全,通畅和环境方面做出了巨大的贡献。
1.2 欧盟动态信息的智能交通系统发展现状
欧共体内部从60年代末70年代初开始出现有关ITS 的讨论。70年代后半期,德国博世和大众公司开始涉足路车之间的通讯、导航实验计划。1988年,在法国总统密特朗的倡导下,欧洲19个国家的政府和企业界开始了名为“尤里卡”的联合开发计划,旨在建立跨欧洲的智能化道路网,投资50亿美元。为了将研究成果尽快投入使用,欧盟委员会与民间企业(汽车、电子和通讯业)成立了欧洲道路运输信息通讯合作组织(ERTICO) ,负责产业界与地方、中央与欧盟外国家政府间的联系。ERTICO作为欧盟委员会的咨询机构,制定战略性的实用化计划,推动标准化工作进程。
ERTICO的使命是促进和支持ITS在整个欧洲的应用,创造一个更令人满意的交通环境,并取得良好的经济回报。通过ERTICO企业及机构能更有效地合作,没有部门及国家的限制,共同创建一个成功的欧洲ITS大市场。
欧洲的代表性交通信息系统有:SOCRATES、EURO SCOUT、TrafficMaster和RDS-TMC。其中RDS-TMC是应用最成功,使用范围最广的大规模交通信息解决方案。RDS是于1984年由欧洲广播联盟(EBU)制定的数据广播系统的欧洲规范。TMC(Traffic Message Channel,交通信息频道)是一个数字编码系统。
2003英国ITIS公司的推出以浮动车数据为基础的交通信息服务,包括车辆行车时间预测,被盗车辆跟踪,德国VISUM Online是先進出行信息系统(ATIS)的理想平台,其内核算法融合了检测器数据、浮动车(FCD)数据和交通事故数据,VISUM Online所得信息可直接通过网络发布;欧洲实时交通信息的提供商Trafficmaster以固定探测数据为主,浮动车数据作为补充,为车载设备、移动电话服务、固定或移动网络提供服务。荷兰和丹麦等国正在进行基于浮动车的动态交通信息服务的小规模试验。
1.3 美国动态信息的智能交通系统发展现状
美国从20世纪80年代开始,将先进的信息技术、数据通信技术、电子控制技术及计算机处理技术等,有效地综合应用于地面交通管理体系,从而建立起一种大范围、全方位发挥作用的,实时、准确、高效的智能交通系统。
1.4 国内动态信息的智能交通系统发展现状
目前我国大部分城市如北京、上海、深圳等正在规划和建设基于浮动车的交通信息采集系统,旨在建立包括交通信息采集、信息处理、信息服务、決策支持等功能。
从国内的研究和发展现状可以看出:智能交通系统的发展对交通信息的采集、处理提出了更高的需求。包括:(1)信息的实时性:交通信息的采集与处理在时间上要与实际交通系统保持同步。(2)信息的准确性:获取的交通信息应能准确反映道路交通状况,与实际交通系统的误差很小。(3)信息的全面性:交通信息采集应覆盖整个道路网络,全面反映道路网络交通状态。
2 研究的内容
2.1 总体目标
本项目主要解决将动态导航采集、发布、应用、汽车导航、汽车安防管理、汽车娱乐等有机的整合问题,开发出实用、适用、能有效利用动态交通信息,并能有效向动态交通系统贡献数据的智能车载信息终端,该终端能够均衡整个城市交通状态,达到最有效利用道路资源。系统、产品要达到的主要技术性能指标
(1)系统对用户的响应时间:不大于30秒。
(2)含自检测、恢复时间:小于3秒。
(3)卫星定位准确度误差:小于2.5米/95%。
2.2 项目研究的内容分解
2.2.1 历史路况信息模块
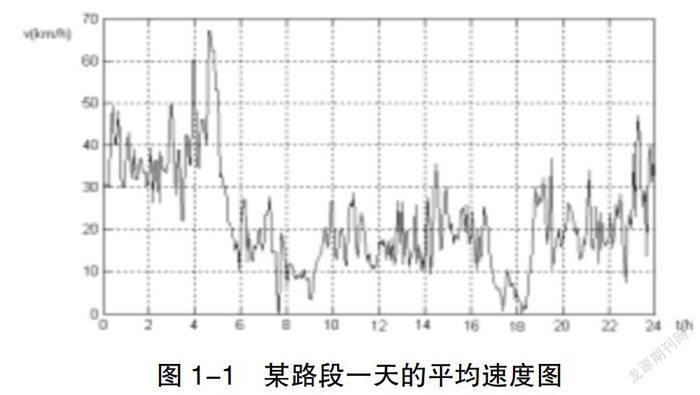
通过分析经过同一条路段的历史数据,得出这一路段的周一至周五的路况规律,周六周日的路况规律,在没有实时车辆经过这一路段的情况下,以历史信息为现在时刻的路况信息。
例如:图1-1为深圳市某一路段的一天(非节假日)24小时平均速度图。
从图中我们可以得出在早晨8点左右下午18点左右的上下班时间这一路段是拥堵的。经过长期统计之后,这段路每个时间段的路况信息(塞车、拥挤、畅通)即可统计出来,能够作为正常情况下这段路的预测路况。当然这需要大量的统计工作和历史数据信息。
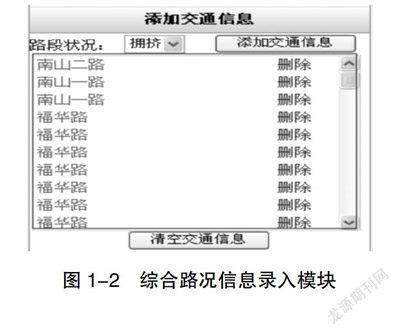
2.2.2 综合路况信息录入模块
综合路况信息录入为后台服务中心坐席人员,参考各方面的信息,对路况信息做出的一种修订,其具有最高的级别。图1-2~图1-6是赛格导航研发人员对这一模块所做工作的简要说明:
通过添加交通信息按钮,选择具体道路的路段状况(拥挤、缓行或畅通),即可保存成功:
为了显示方便,点击其中一个路段时,此路段会在地图居中并显示如图1-4所示:
同样的道理,综合路况信息录入模块,也可以将过时的路况信息删除,如图1-5所示:
2.2.3 Internet路况信息模块和交警交通监控数据模块
这两个模块的路况信息模块主要保留对外的信息接入窗口,本着资源共享,互惠互利的原则,将交通管理部门和其他研究公司的实时数据接入,弥补公司数据搜集方面的一些不足。
根据搜集数据,导出十字路口的车流量大致分布,进而控制红绿灯的时间。总的来说红绿灯的控制采用三种原则:定时控制、车辆感应式控制、优化控制。
(1)定时控制。根据交叉路口一定时间的交通量预先确定所有的控制参数,即周期、相位、绿信比,人为设置方案(配时参数)。
在车流量相对稳定的时间段采用此控制模式。
(2)车辆感应式控制。根据交通路口的交通量需求变换信号灯色,没有固定的周期和绿信比。
目前车辆感应控制使用感应式控制机,通过埋设和悬挂在交叉路口的车辆检测器获得车辆信息,进行信号变换。也是我们主要采取的控制模式。
(3)优化控制。控制系统根据检测器送来的信息,实时产生出对某种性能指标来说是最佳的配时方案,付诸实施。
交警交通监控数据模块提供接口,实现与交通监控数据的无缝对接。能够实现以下功能:
(1)能够采集所指定定点检测线圈的关键道路断面,原则上要求能够处理所有关键道路断面的检测。
(2)实现所有视频交通信息采集点,同时采集的数据点不少于50个,并且可以自由切换。
(3)能将各信息源的实时数据传输至系统平台,并为其他数据采集系统预留接口。
(4)信息分析中心能够根据接口信息直接计算道路车速、车流量等信息。
(5)分析结果能够以通过有线网络或无线网络直接发送政府相关管理机构。
2.2.4 安装MNA车辆模块
这是实时交通信息的车载卫星导航终端研究的重要部分,也是未来实时路况信息的主要来源,利用车载终端安装的MNA(Mobile Navigation Assistance)分析每秒钟的速度数据(分析周期,上传周期待定),得出车辆经过路段的路况信息。图1-6 为60秒数据模拟图:
图1-6 MNA记录速度曲线图
其中速度曲线的平均值为21.28 km/h,最小二乘曲线积分速度平均值为30.06 km/h。由平均速度的高低判断经过路段的拥堵情况,然后上传给ITS交通路况分析中心。
2.2.5 浮动车数据模块
浮动车数据处理的好坏直接关系到系统产业化的时间,赛格导航的研发人员进行了大量的算法模拟,并且经过近半年的城市测试,取得了可喜的成绩,目前的自动识别路况信息的准确率已经超过70%,相信经过算法和参数调整、改进,准确率仍能够得到大幅提高。
3 结论
实时交通信息的车载卫星导航终端具有诸多现实价值:
(1)提高道路利用率。动态发布路况信息,提供绕行选择,在无需增加道路设施的情况下,有效提供路网利用率增长10%。
(2)减少能耗,提高平均车速,有效节约能源30%。
(3)节约出行时间,依据及时的交通信息,有效绕开拥堵路段,节约出行时间15%。
(4)环境污染,避免拥挤路段,提高发动机工作效率,降低环境污染30%。
综上,结合动态信息的智能交通管理系统对于提高道路运输能力、提高出行效率、节约能耗、减少排放和环境污染将发挥重要作用,其成功的应用和推广将产生良好的经济效益和社会效益。
参考文献:
[1]卓福庆.面向自驾联网车的交叉口协同控制方法研究[D].华南理工大学,2016.3.
猜你喜欢
海洋信息技术与应用(2022年1期)2022-06-05 07:38:22
装备制造技术(2021年2期)2021-07-21 05:38:44
现代装饰(2020年5期)2020-05-30 13:01:56
汽车与新动力(2019年5期)2019-11-07 05:20:16
系统管理学报(2018年3期)2018-08-13 01:05:42
中国核电(2017年2期)2017-08-11 08:00:56
流程工业(2017年4期)2017-06-21 06:29:52
流程工业(2017年4期)2017-06-21 06:29:50
石油化工建设(2015年2期)2015-12-01 04:16:44
中国教育技术装备(2015年10期)2015-03-01 02:41:05
