一种吞吐量优化的无人机飞行轨迹规划算法
2021-09-08 12:10:22李春若邹子贤
火力与指挥控制 2021年8期
李春若,邹子贤
(江西财经职业学院南昌校区信息中心,南昌 331700)
0 引言
由于移动便捷、部署灵活,无人机(Unmanned Aerial Vehicle,UAV)通信已成为满足下一代蜂窝用户需求的有效技术[1-2]。UAV 给空中和陆地的连接架上通信桥梁。
目前,UAV 常用于灾难现场的救援。将UAV 作为空中基站,其为地面上用户提供可靠、低时延的通信服务[3-4],进而适应极端场景的通信需求。与地面通信相比,UAV 在三维空间的灵活能力强。例如,在地震的应急场景,可利用UAV 作为基站,构建临时的网络,实现快速救援[5]。
无人机的通信位置对通信服务质量有直接影响[6]。无人机为地面上的用户提供通信服务时,需规划一条有效的飞行轨迹,进而保证通信链路的可靠性。例如,文献[7]提出基于中断概率感知的UAV轨迹规划算法,以最小化网络的中断概率为目标函数设计规划UAV 轨迹。文献[8]针对全双工的UAV,提出基于迭代算法的轨迹规划算法。文献[9]对UAV 轨迹进行研究。研究表明:增加天线数目可提高中继网络的性能。
此外,文献[10]提出轨迹预测的非线性模型,通过优化UAV 的移动轨迹,提高UAV 中继服务质量。文献[11]对UAV 的发射功率和移动轨迹进行了联合优化,旨在提高通信链路的可靠性。
然而,上述研究工作并没考虑到吞吐量。吞吐量是衡量系统性能的重要指标。文献[12]对UAV通信系统的吞吐量问题进行了研究,并提出连续凸优化策略。文献[13]提出了基于非正交多址接入的UAV 通信系统的传输功率的自适应策略,进而最大化吞吐量。
为此,本文以最大化吞吐量为目标函数,规划UAV 的飞行轨迹,提出基于吞吐量优化的UAV 轨迹规划算法TPMT。先依据视距和非视距通信链路,构建UAV 与用户的通信模型,再构建吞吐量优化的目标函数。最后,利用GASimplex 算法求解目标函数,进而实现对UAV 飞行轨迹的规划。仿真结果表明,提出的TPMT 算法有效地提高吞吐量。
1 系统模型
1.1 网络模型
考虑如图1 所示的网络模型,一个UAV 盘旋在高度为H 的上空。UAV 为U 个用户服务。令ui表示第i 个用户,且i=1,2,3,…,U。

图1 网络模型


1.2 信道模型

由于预先难以判断用户ui与UAV 间的通信链路是否为视距还是非视距,利用平均路径衰耗模型表述用户ui与UAV 间的通信链路模型:
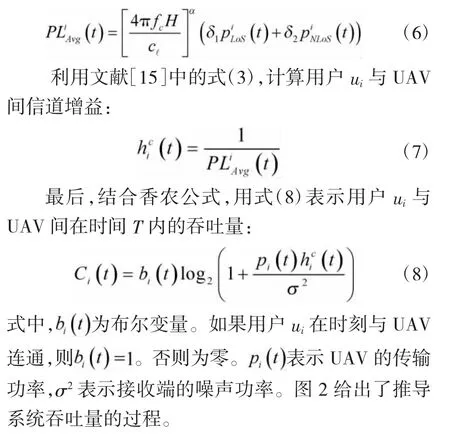
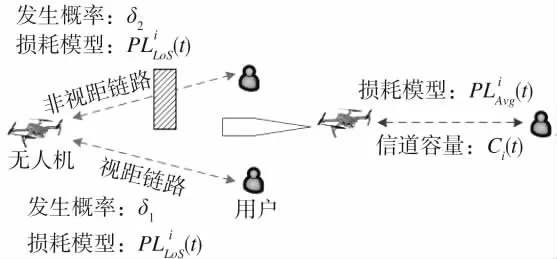
图2 信道模型
2 基于吞吐量最大化的UAV 移动轨迹
2.1 目标函数
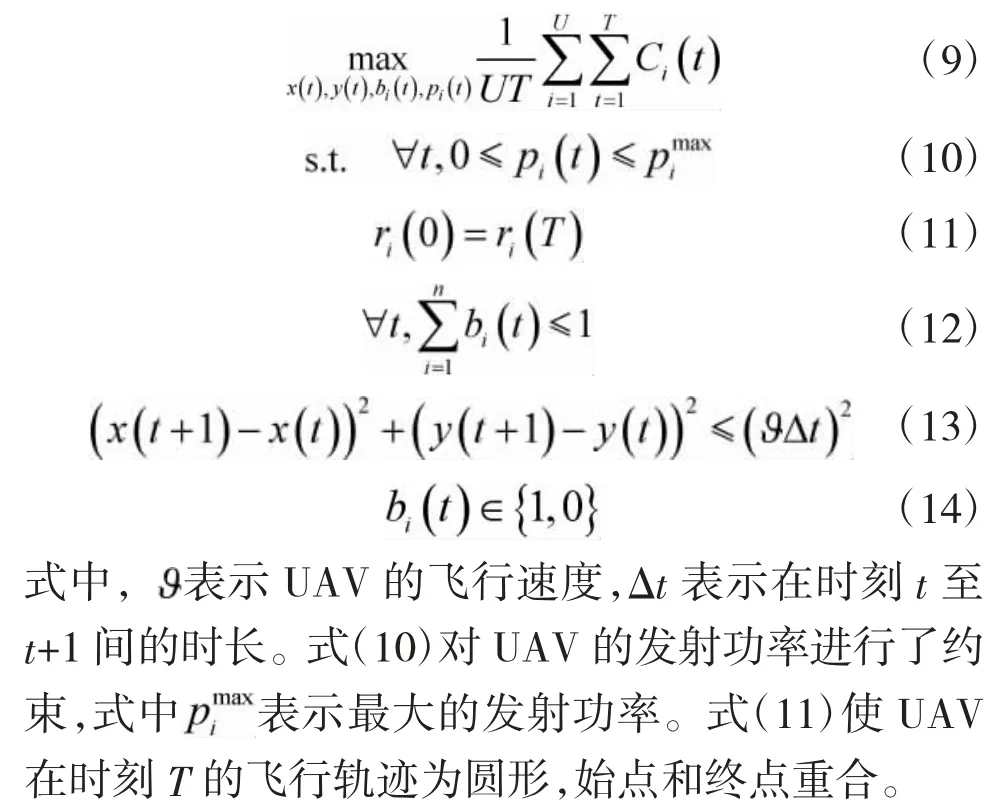
将基于吞吐量最大化的UAV 移动轨迹进行形式化表述:
2.2 目标函数的离散化处理
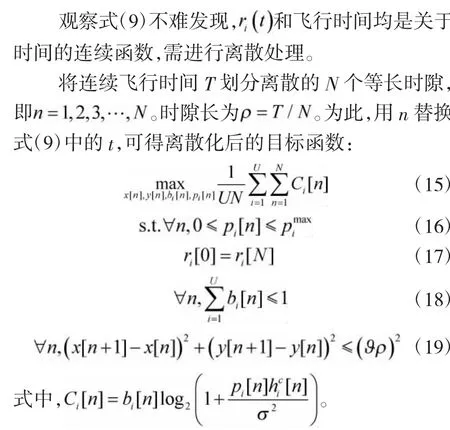
2.3 目标函数的求解
式(10)的求解问题属于混合整数非线性规划(Mixed Integer Nonlinear Programming,MINLP)问题。为此,引用文献[16]提出的混合优化算法GASimplex 求解MINLP 问题。
GASimplex 算法结合了遗传算法模块和单纯形算法模块,其算法流程如图3 所示。GASimplex 算法利用遗传算法模块GASolver 对MINLP 中变量进行混合编码,并通过单纯形算法模块SimplexSolver 计算个体适应函数。GASimplex 算法能够有效地处理非凸规划、非连续问题,算法详情见文献[16]。

图3 GASimplex 算法流程
3 性能仿真
3.1 仿真环境
在Windows 7 操作系统、8 GB 内存,core i7 CPU的PC 上进行实验仿真。利用MATLAB 软件建立仿真平台。考虑如图1 所示的网络模型,UAV 服务的用户数为6(U=6),它们随机分布于120 m×240 m。表1 给出了具体的仿真参数。
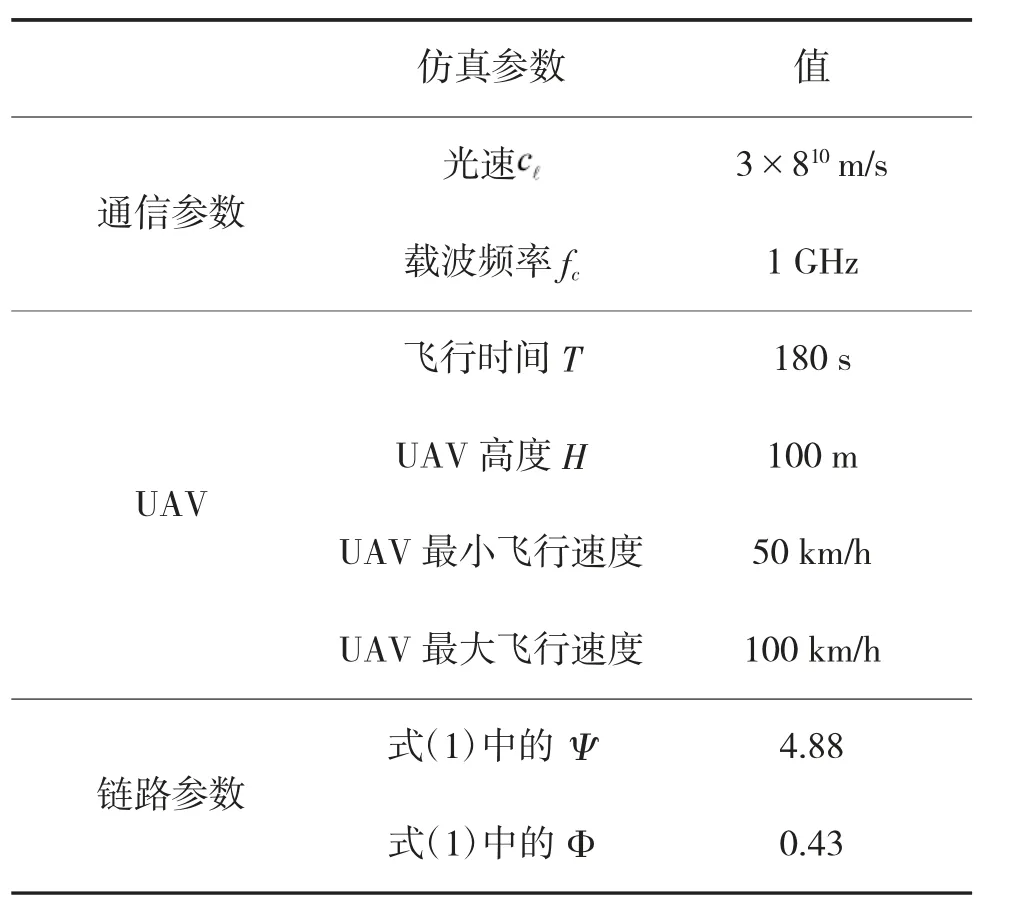
表1 仿真参数
3.2 TPMT 算法的移动轨迹及收敛性能
首先,分析TPMT 算法的移动轨迹,如下页图4所示。从图4 可知,UAU 所移动的轨迹能够有效地覆盖所用用户。在飞行时间T 达到100 s,UAV 所移动的轨迹能够将6 个用户覆盖,能够有效为用户提供通信服务。

图4 TPMT 算法中UAV 的移动轨迹
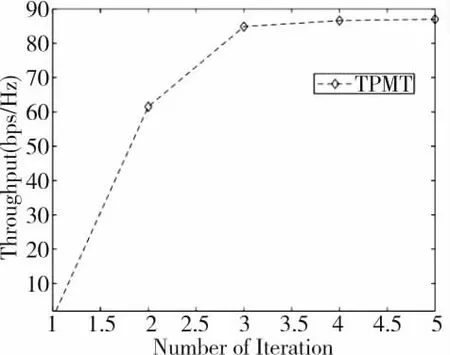
图5 TPMT 算法的收敛性能
3.3 吞吐量性能的对比分析
为了更好地分析TPMT 算法,选择UAV 固定圆形轨迹(Fixed Circular Trajectory,UAV-FCT)和UAV静止(UAV-Static)作为参照。在UAV-FCT 算法中,UAV 在沿着半径为60 m 的圆飞行;在UAV-Static算法中,UAV 盘旋在覆盖区域的上空不移动,如图6 所示。
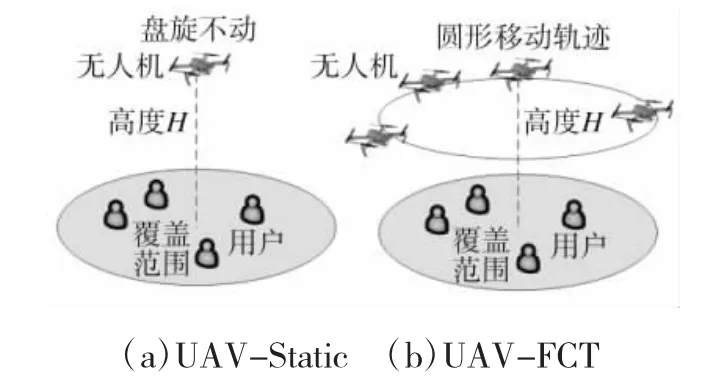
图6 UAV-Static 算法和UAV-FCT 算法示意图
图7 给出了TPMT 算法、UAV-FCT 算法和UAVStatic 算法的吞吐量随高度H 的变化情况,并考虑了链路模型因子α 对吞吐量的影响(见式(5))。在仿真中,取α=2,3,4。
从图7 可知,相比于TPMT 算法、UAV-FCT 算法,UAV-Static 算法的吞吐量是固定的,且长期保持最低的水平。而TPMT 算法的吞吐量最高。原因在于:TPMT 算法以最大化吞吐量为目标函数,规划UAV的移动轨迹,进而提升了系统的吞吐量。此外,链路模型因子α 的增加,降低了TPMT 算法的吞吐量。原因在于:α 的增加,提高了信道增益(见式(7))。
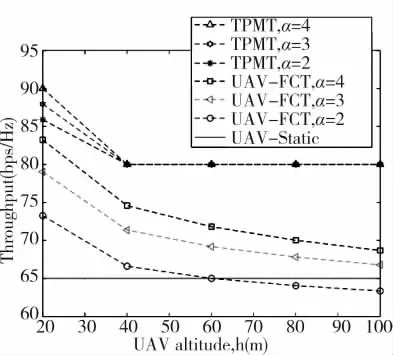
图7 吞吐量
4 结论
基于UAV 的协作通信为视距和非视距环境提出可靠的通信链路。考虑了UAV 的飞行轨迹对通信链路和吞吐量有直接影响,本文提出了TPMT 算法。该算法通过规划UAV 移动轨迹,优化吞吐量。仿真结果表明,提出的TPMT 算法有效地提升了吞吐量。后期,将考虑大型的UAV 网络,对多无人机系统的组网进行研究。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
移动通信(2021年5期)2021-10-25 11:41:48
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
集装箱化(2016年11期)2017-03-29 16:15:48
集装箱化(2016年12期)2017-03-20 08:32:27
中国交通信息化(2014年3期)2014-06-05 03:07:09
集装箱化(2014年2期)2014-03-15 19:00:33