高压线作业机器人的磁悬浮系统原理性设计及仿真
2021-09-07 06:07:42周展帆严宇黄润清刘佳豪徐显金
电力科学与工程 2021年8期
周展帆,严宇,黄润清,刘佳豪,徐显金
高压线作业机器人的磁悬浮系统原理性设计及仿真
周展帆1,严宇1,黄润清1,刘佳豪2,徐显金3
(1. 国网湖南省电力有限公司 检修公司,国网湖南省电力有限公司变电智能运检实验室,湖南 长沙 410000;2. 95997部队,湖南 长沙 410000;3. 湖北工业大学 机械工程学院,湖北 武汉 430068)
针对高压线巡检机器人易打滑、易磨损以及爬坡慢等问题,提出一种磁力悬浮方法:利用磁悬浮装置产生与重力大小相同、方向相反的安培力,使机器人悬浮在高压线上,从而彻底消除打滑和磨损问题。通过对载流导线在高压输电线产生的磁场中受到的安培力进行分析,提出一种全新的磁力悬浮方式;建立磁力悬浮的物理模型,分析悬浮力大小与模型相关尺寸的关系;利用COMSOL软件对该模型进行仿真。结果表明,磁悬浮系统模型产生的磁悬浮力近似等于理论计算值,证明了所提磁悬浮系统原理性设计的正确性。
高压线;磁悬浮;物理模型;巡检机器人
0 引言
电力配送过程中容易受到自然和人为因素的影响,导致线路上金具及导线出现故障,因此输电线路的日常巡检与维护尤为重要。自20世纪80年代末,一些发达国家开始对高压输电线路巡检机器人进行研究。典型的代表是加拿大魁北克水电研究院研制的巡检机器人LineScou[1-3]、LineRange[4]以及由东京大学、日本电力系统公司和关西电力公司三方合作研制的巡检机器人Expliner[5]。国内对高压线巡检机器人的研究起步较晚。武汉大学研究团队研制出一种沿着相线行驶的轮臂式巡检机器人,能适应220 kV单分裂线路和220~550 kV多分裂线路巡检作业[5-12]。长沙理工大学与湖南电网公司合作研发了能对高压输电线金具进行维修工作的多悬臂轮式检修机器人[13-16]。
国内外研发的高压输电线路巡检机器人,多数采用电机驱动的多悬臂轮式机构,当线路积水、覆冰或者机器人处于上坡线路段时,行走轮与导线表面之间的静摩擦力不足以克服重力而导致机器人打滑,打滑不仅影响机器人的作业效率、增大能耗,也会导致高压输电线路表面的严重磨损。打滑问题是轮式驱动巡检机器人固有的问题。本文提出一种磁力悬浮方法,利用通电线圈在高压导线周围的环形磁场中受到的安培力,使机器人能悬浮于高压线路上,通过实现无接触、无摩擦进而解决打滑和磨损问题。
1 磁力悬浮原理
1.1 磁力悬浮装置模型
磁力悬浮装置如图1所示,将磁力悬浮装置设计成上下左右均对称,可满足高压线巡检机器人遇到障碍时进行开合运动的要求。高压线周围会产生方向确定的环形磁场,合理布置线圈可以得到与重力方向相反的安培力,考虑到线圈中电流过小或者线圈匝数过少会导致安培力过小而不能实现克服自身重力。因此,磁芯材料选择具有聚磁特性的强磁材料,可以有效增加竖直方向上的安培力大小,确保机器人可以悬浮在高压线上。总体结构如图2所示。采用3D打印技术将线圈无缝地镶嵌到强导磁材料中。

图1 磁力悬浮装置
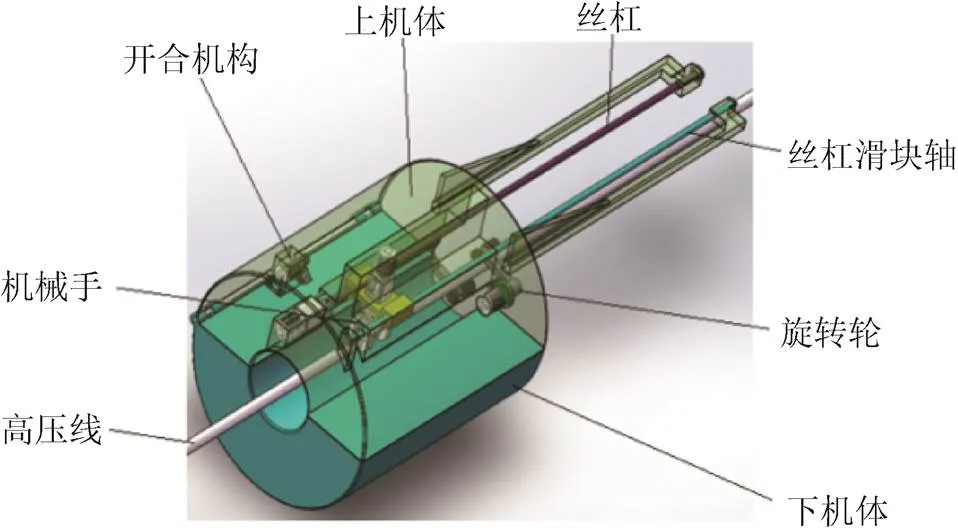
图2 磁力悬浮机器人总体结构
1.2 磁力悬浮原理
如图3所示,假设高压直流输电线的电流沿轴正方向,根据右手定则,得到其产生的磁场磁感应线的方向。图4为高压直流输电线产生的磁感应线在平面的分布。在高压输电线附近有与其平行的载流导线,电流方向与高压输电线电流方向相反。根据左手定则,该载流导线的受力如图4所示。

图3 高压输电线磁感应线方向

图4 载流导线受力方向
根据安培定律:

可求载流导线所受的安培力。设高压输电线的电流为1,设载流导线的长为,通过导线的电流为2,载流导线到高压输电线中心的距离为0,载流导线的电流方向与磁感应线的夹角为。因为磁感应线垂直于线圈,故=90°,sin=1。
磁场强度:
式中:0为空气磁导率(0=4π×10–7H/m);r为强磁材料的磁导率。
可以求得安培力大小:

以xz轴为对称平面,沿磁感应线方向的高压输电线方向绕有一线圈,上下各有n边平行于高压输电线。由于沿圆周方向的边每一段电流元的方向均与磁感应线的方向平行,即θ=0°,故沿圆周方向的导线不受力。因此得到简化图如图5所示。
导线通入电流后,上下两侧平行于高压输电线的边中电流方向相反,而受到的磁场方向相反,如图6所示。设每相邻两根导线之间的夹角为,当导线紧密排列时,根据几何关系,可以得到两根相邻导线之间的夹角与导线直径以及圆的半径0之间的关系:

式中:d为载流线圈的直径。
设离轴垂直距离最小的导线与轴的 夹角为,第根导线与轴的夹角,相邻两根线圈之间的夹角为:


则巡检机器人受到的悬浮力2N为:
因此可以求得载流导线在轴上的合力2N:

压线磁悬浮机器人重力:

式中:1、2分别为机器人的外环和内环半径,如图6所示。
实现机器人悬浮于高压线上,即满足:
化简之后可得:

由上式可发现,机器人的长度对悬浮条件没有影响。
2 磁悬浮模型仿真分析
2.1 磁悬浮物理模型
取高压线电流1 000 A,高压线截面确定为(0.02×0.02 π)m2,模型外径10055 m,内径20045 m,模型长度为=0.03 m,载流线圈截面直径=0.004 m,载流线圈内电流不宜过大,通电线圈中电流大小为10 A。强导磁材料选择MnZn铁氧体,其相对磁导率可达到3 000 H/m,考虑经济问题,拟采用r=1 000 H/m
将磁力悬浮模型进行必要的简化以便进行仿真计算。选取线圈=5和=21进行仿真计算。其仿真模型简化如图7所示。

2.2 仿真分析
在COMSOL仿真软件中,高压线材料选择Steel AISI 4340,线圈材料设置为soft iron (without losses),软磁材料设置为MnZn铁氧体,物理场选择为磁场(mf);对磁芯、载流线圈、高压线及内空气域采用自由四面体网格超细化划分,剩余部分采用自由四面体网格较细化划分,在高压线边界以及载流线圈边界设置边界层网格;确定线圈数为5、9、15和21并进行仿真。在高压电流(1 000 A)产生的稳态磁场环境下,对磁力悬浮模型进行求解计算,仿真模型在以及平面的截图如图8和图9所示,其中图8为界面磁通密度模(=21),图9为模型电流密度模及其磁场密度模面箭头。
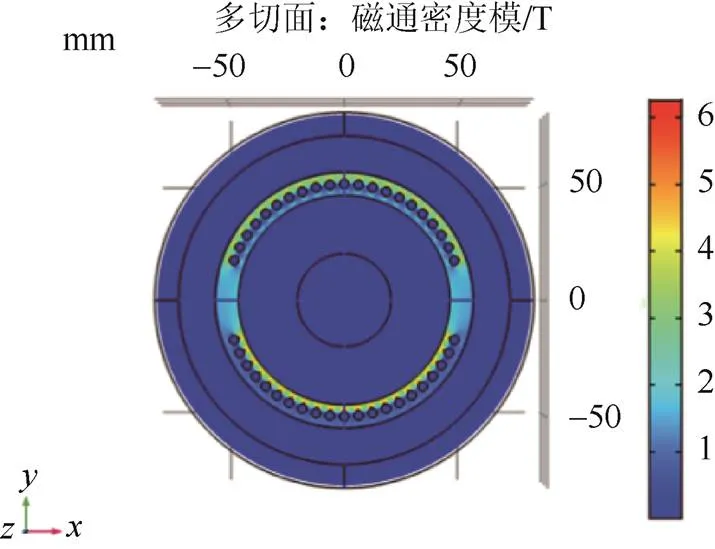
图8 界面磁通密度模(n=21)

由图8中可以看出,软磁材料对磁场有明显的增强作用且高压线的磁场与线圈的磁场发生了耦合;由图9可以看出,面箭头在线圈周围分布密集(面箭头走向为模型内部电流的方向,疏密代表电流密度的大小)。说明线圈匝数越多该处场强越大,产生的安培力越大。虽然仿真结果与理论结果之间存在误差,但是误差范围在可接受范围之内,证明了该原理的正确性。在不同线圈条件下,在方向上的电磁力a与理论计算数值2N如表1所示。
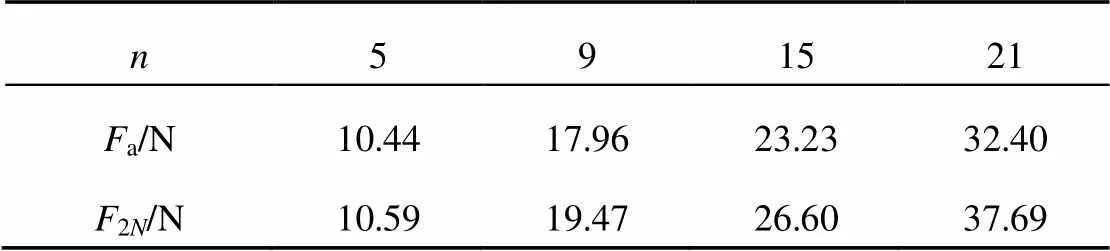
表1 相应线圈匝数的仿真数值与理论计算数值
由表1可知,随着线圈数的增加,仿真数值和理论计算数值之间的误差逐渐变大,其原因在于磁耦合效应的存在,导致仿真数值偏小。
通过仿真值和理论值的对比,相同高压线磁场环境下,线圈匝数的增多会造成更加严重的磁场耦合。研究线圈匝数最优值有助于提高磁力悬浮装置的稳定性,可以适应更加复杂的输电线路环境。
3 结论
提出了一种磁力悬浮方法,旨在彻底解决高压线巡检机器人在巡检过程中出现的打滑及磨损问题。根据提出的理论,展开了仿真验证工作,并将其仿真值与理论值进行了对比研究。由于磁耦合效应,最终仿真值小于理论值,但仍可证明该理论方法是正确的。
[1] POULIOT N, RICHARD P, MONTAMBAULT S. LineScout power line robot: characterization of a UTM-30LX LIDAR system for obstacle detection[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal: IEEE, 2012: 4327-4334.
[2] RICHARD P L, POULIOT N, MONTAMBAULT S. Introduction of a LIDAR-based obstacle detection system on the LineScout power line robot[C]//2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics(AIM). Besacon, France: IEEE, 2014: 1734-1740.
[3] POULIOT N, RICHARD P L, MONTAMBAULT S. LineScout technology opens the way to robotic inspection and maintenance of high-voltage power lines[J]. IEEE Power and Energy Technology Systems Journal, 2015, 2(1): 1-11.
[4] RICHARD P, POULIOT N, MORIN F, et al. LineRanger: analysis and field testing of an innovative robot for efficient assessment of bundled high-voltage powerlines[C]//2019 International Conference on Robotics and Automation(ICRA). Montreal, QC, Canada: IEEE, 2019: 9130-9136.
[5] DEBENEST P, GUARNIERI M, TAKITA K, et al. Expliner-Robot for inspection of transmission lines[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, USA: IEEE, 2008: 3978-3984.
[6] CHENG L, WU G. Obstacles detection and depth estimation from monocular vision for inspection robot of high voltage transmission line[J]. Cluster Computing, 2019, 22(2): 2611-2627.
[7] WANG W, WU G, BAI Y, et al. Hand-eye-vision based control for an inspection robot's autonomous line grasping[J]. Journal of Central South University, 2014, 21(6): 2216-2227.
[8] JIANG W, YAN Y, LI Q M, et al. Research on robust stabilization control of high-voltage power maintenance robot under wind load action[J]. Industrial Robot, 2019, 46(6): 870-881.
[9] 徐显金, 吴功平, 钟飞, 等. 巡检机器人的主控软件设计与实现[J]. 武汉大学学报(工学版), 2011, 44(5): 671-675.
XU XIANJIN, WU GONGPING, ZHONG FEI, et al. Design and implementation of main control software for inspection robot[J]. Engineering Journal of Wuhan University, 2011, 44(5): 671-675(in Chinese).
[10] 何缘, 吴功平, 肖华. 高压输电线路巡检机器人机构设计及运动学分析[J]. 高压电器, 2016, 52(6): 61-68.
HE YUAN, WU GOGNPING, XIAO HUA. Mechanism design and kinematic analysis of inspection robot for high voltage transmission lines[J]. High Voltage Apparatus, 2016, 52(6): 61-68(in Chinese).
[11] 樊绍胜, 杨迪, 邹德华, 等. 输电线路螺栓紧固带电作业机器人的视觉搜索、识别与定位方法[J]. 电子测量与仪器学报, 2017, 31(9): 1514-1523.
FAN SHAOSHENG, YANG DI, ZOU DEHUA, et al. Vision-based tracing, recognition and positioning strategy for bolt tightening live working robot on power transmission line[J]. Journal of Electronic Measurement and Instrumentation, 2017, 31(9): 1514-1523(in Chinese).
[12] 杨庆新, 李永建. 先进电工磁性材料特性与应用发展研究综述[J]. 电工技术学报, 2016, 31(20): 1-12.
YANG QINGXIN, LI YONGJIAN. Characteristics and developments of advanced magnetic materials in electrical engineering: a review[J]. Transactions of China Electrotechnical Society, 2016, 31(20): 1-12(in Chinese).
[13] 廖森伟. 输电线路断股修补机器人的研究与设计[D]. 长沙: 长沙理工大学, 2018.
LIAO SENWEI. Research and design for broken strand repair robot on power transmission lines[D]. Changsha: Changsha University of Science & Technology, 2018(in Chinese).
[14] 严宇, 刘夏清, 邹德华, 等. 输电线路带电巡检作业单臂机器人行走姿态控制方法[J]. 电力科学与技术学报, 2016, 31(2): 115-120.
YAN YU, LIU XIAQING, ZOU DEHUA, et al. Walking posture control method of transmission line single arm inspection robot[J]. Journal of Electric Power Science and Technology, 2016, 31(2): 115-120(in Chinese).
[15] 李庆兴, 张明. 螺栓紧固机器人输电线路控制方法分析[J]. 通信电源技术, 2020, 37(9): 249-250.
LI QINGXING, ZHANG MING. Analysis of transmission line control method of bolt fastening robot[J]. Telecom Power Technologies, 2020, 37(9): 249-250(in Chinese).
[16] 叶紫权. 输电线路防振锤更换带电作业机器人的研究与设计[D]. 长沙: 长沙理工大学, 2017.
YE ZIQUAN. Research and design for damper-replacing live working robot on power transmission line[D]. Changsha: Changsha University of Science & Technology, 2017(in Chinese).
Principle Design and Simulation of Magnetic Levitation System for High-voltage Line Operation Robot
ZHOU Zhanfan1, YAN Yu1, HUANG Runqing1, LIU Jiahao2, XU Xianjin3
(1. State Grid Hunan Electric Power Corporation Maintenance Company, Substation Intelligent Operation and Inspection Laboratory of State Grid Hunan Electric Power Co., Ltd., Changsha 410000, China; 2. 95997 Army, Changsha 410000, China; 3. School of Mechanical Engineering, Hubei University of Technology, Wuhan 430068, China)
Aiming at solving the problems of high-voltage line inspection robots that are easy to slip, wear and climb slowly, a magnetic levitation method was proposed: a magnetic levitation device was used to generate an ampere force that was the same as the gravity and opposite direction to make the robot levitate on the high-voltage line, thereby completely eliminating slippage and wear problems. A new magnetic levitation method was proposed by analyzing the ampere force of current carrying conductor in the magnetic field generated by high voltage transmission line; the physical model of magnetic levitation was established, the relationship between the levitation force and the relevant size of the model was analyzed; and the COMSOL software was used to simulate the model. The results show that the magnetic levitation force generated by the magnetic levitation system model was approximately equal to the theoretical calculation value, which proves the correctness of the principle design of the magnetic levitation system proposed in this paper.
high-voltage line; magnetic levitation; physical model; the inspection robot
10.3969/j.ISSN.1672-0792.2021.08.004
TM8
A
1672-0792(2021)08-0027-06
2021-04-29
周展帆(1993—),女,工程师,主要从事电力机器人结构设计及控制系统开发;
严 宇(1986—),男,高级工程师,主要从事电力机器人控制系统开发;
黄润清(1995—),男,助理工程师,主要从事变电一次设备检修;
徐显金(1971—),男,副教授,主要从事电力作业机器人研究。
猜你喜欢
小猕猴智力画刊(2023年4期)2023-04-23 08:50:18
作文小学中年级(2023年1期)2023-02-12 06:52:22
小学科学(2022年23期)2023-01-30 08:16:12
格言·校园版(2021年22期)2021-09-27 05:39:56
躬耕(2020年2期)2020-03-16 03:21:02
高中生·天天向上(2017年3期)2017-06-12 06:34:38
通信电源技术(2016年3期)2016-03-26 07:13:44
火控雷达技术(2016年2期)2016-02-06 02:28:50
电测与仪表(2015年2期)2015-04-09 11:28:50
电测与仪表(2014年21期)2014-04-04 12:31:54