基于STM32的双轮自平衡小车设计实现
2021-09-01 22:23:52杨东泽孙强丁韬贾萱温裕鸿席鹏程赵昱皓李德玖
科学与生活 2021年9期
杨东泽 孙强 丁韬 贾萱 温裕鸿 席鹏程 赵昱皓 李德玖
摘要:本项目基于STM32来设计实现双轮平衡小车,硬件方面采用STM32F103R6单片机作为系统的主控芯片,采用MPU6050陀螺仪检测小车的自身姿态,采用两个直流电机和两路直流电机驱动器控制平衡小车的前进后退和转速。同时加装蓝牙传输模块将小车数据传输到手机APP上,通过手机APP也可以遥控小车的运行。在软件方面,平衡小车实时读取陀螺仪的数据获取自身姿态,并与目标姿态对比后通过PID控制两轮的转速和转向,实现小车姿态的调整。
1.引言
如今科技发展不断进步,但从这些年来讲,移动机器人的发展越来越好,产业链也日渐完善,在生活中我们或多或少可以见到不同形式的机器人的存在。这几年最受人们关注的莫过于平衡车了,自动平衡车的各种优点让它迅速成为了一种环保又舒适的绿色交通代步工具,有望成为以后未来汽车和自行车的代步品。
2.硬件设计
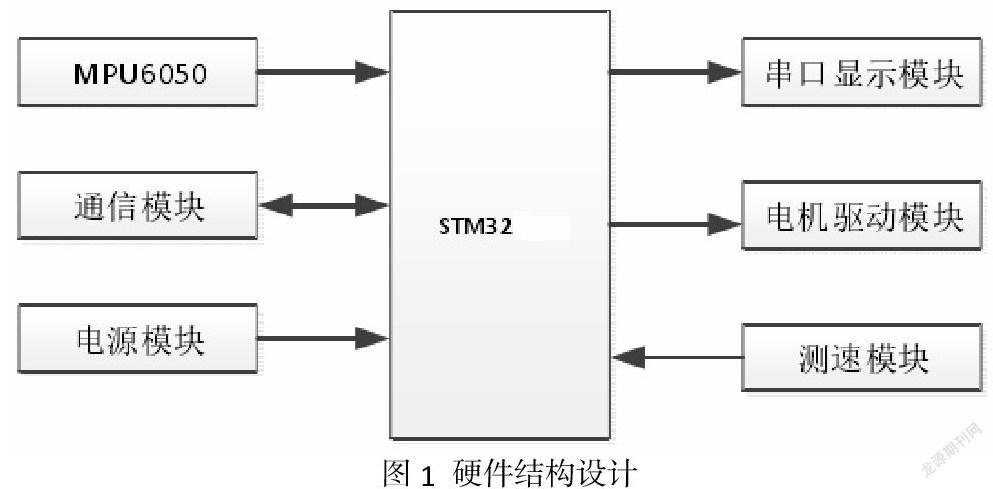
该系统由主控制器STM32单片机、电机驱动模块、蓝牙通讯模块、直流电源模块、液晶显示模块、传感器感知模块和速度测量模块等部分组成。
控制器采用单片机STM32F429,该单片机使用的内核是Cortex M4,含有DSP指令集,它内部的SRAM
大小为256KB。该芯片的模拟量转为数字量的转换速度非常快,并且转换模块的工作供电电压很低,内部含有8个定时器,可同时处理32位数据,I/O端口可以复用为很多其它的功能,常用的串行接口有USART和SPI通信,该单片机最高的工作频率可以达到180MHz , STM32F429单片机总线访问的速度非常快,并且该单片机拥有强大的数据处理能力,可以完全满足本次设计要求。
显示模块主要是将双轮自平衡小车的运行状态实时的显示到人机交互界面,使我们进一步了解双轮自平衡小车的运行状况。显示模块采用串口触摸屏显示,串口触摸屏HMI就是将它的一般功能进行封装,使用者可以通过串口USART与屏幕进行消息的交换,从而满足用户的要求,人机交互界面非常友好且操作性良好,用户可以通过屏幕发送相应的指令来完成相关操作。
3.自平衡原理与控制策略
由于小车上安装有六轴传感器MPU6050,可以检测到小车x, y,,三轴的倾斜角度和三轴方向的加速度,将所收集的数据进行分析和处理,可以得到小車所处的状态,并且程序是根据小车所处的不同状态而编写。
(1)静止时:当小车的重心位于电机轴线中心位置的正上方时,此时传感器MPU6050将采集到的数据进行处理分析得出小车位于00位置,即平衡位置,此时小车静止。当检测到小车的重心向前倾斜时,则需要小车向前运动来保持小车的平衡状态;当检测到小车的重心向后倾斜时,则需要小车向后运动来保持小车的平衡状态。
(2)前进时:小车略微向后加速,这将倾斜小车的重心,使其稍微向前,然后再使小车在反方向加速,小车就会向前倾斜,同时保持小车处于平衡状态,使得小车前进。
(3)后退时:小车的车轮稍微向前加速,这将倾斜小车的重心,使其稍微向后,然后再使小车的两轮在反方向加速,这将使小车向后倾斜,同时保持小车的平衡,使得小车倒退。
(4)左转时:当小车处于前进或者后退并且保持平衡状态时,控制小车的左轮以较慢的速度运动、小车的右轮以较快速度运动时,即可使小车向左转。
(5)右转时:当小车处于前进或者后退并且保持平衡状态时,控制小车的右轮以较慢的速度运动、小车的左轮以较快速度运动时,即可使小车向右转。
经过理论分析即可得出小车处于不同状态时的控制思路,进而对小车实现不同的控制。
结论
本次系统设计采用单片机STM32作为主控制器,对该系统发送指令,实现控制;传感器MPU6050模块用来检测当前小车的倾斜程度,通过倾斜程度来对小车进行控制;显示模块用来显示小车的运行信息;最终小车实现了在不同状态下的自平衡。
参考文献:
[1] 李详鹏, 陈春, 周子文,等. 基于MEMS传感器的两轮平衡小车设计[J]. 科技创新与应用, 2019, 000(022):27-29.
[2] 朱先勇, 欧阳修若, 孙灵欣,等. 基于STM32f1两轮自平衡小车设计[J]. 数码设计:下, 2019, 000(008):82-83.
[3]郑欢.双轮小车自平衡循迹系统设计与实现[J].内蒙古煤炭经济,2019(08):141-142.
[4]李帅男.基于STM32控制的双轮自平衡小车的设计[J].现代工业经济和信息化,2018,8(13):34-35.
[5]钱玉恒,杨亚非.基于双轮自平衡小车的创新实验课教学内容设计[J].实验技术与管理,2018,35(09):29-33.
[6]徐施博,李辉,黄毅,陈彬.基于STM32的单轴双轮自平衡小车的设计[J].仪表技术,2018(02):27-29.
[7]孟帅,常德军,陈章宝.双轮自平衡小车控制系统设计[J].电子世界,2017(01):89-90.
[8]徐锦.基于STM32单片机的双轮自平衡小车系统的设计[J].山东工业技术,2016(21):282+272.
[9]陈章宝,鲍伟超,孟帅.两轮自平衡小车的研究与设计[J].蚌埠学院学报,2016,5(05):1-5.
经费支持:衢州学院实验室开放项目(KFXM202007)
衢州学院 电气与信息工程学院 浙江省衢州市 324000
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:12
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
电子制作(2019年13期)2020-01-14 03:15:28
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
通信电源技术(2016年5期)2016-03-22 01:10:02
地矿测绘(2015年3期)2015-12-22 06:27:26