像控点对无人机坝区遥感影像成果精度的影响分析
2021-09-01 08:53:52田鹏举黄林峰宋善海
中低纬山地气象 2021年4期
廖 瑶,田鹏举,李 雪,黄林峰,胡 锋,宋善海
(贵州省生态气象和卫星遥感中心,贵州 贵阳 550002)
0 引言
无人机遥感具有成本低、机动灵活、维护简单等特点,成为继卫星遥感和有人机遥感后最为有效的低空遥感平台,已经成为低空航空遥感的主流平台[1]。近年来,无人机已在灾害应急监测[2-3]、灾损评估[4]、作物长势监测[5]等各个领域得到了广泛的应用。
在无人机遥感中,最重要的2个成果是正射影像和DSM。正射影像是一种数字测绘产品,同时具有几何精度、数学精度和影像特征,反映了地物的空间平面位置。DSM地形数据表征地物的表面高低起伏,对地理地形地貌的研究具有重要作用,同时也是测量地物表面积的重要数据。
小型消费级无人机上手容易,携带方便,是贵州复杂地形条件下开展无人机遥感的利器。同时也由于地形复杂,对是否需要像控点,像控点的有无以及多少对无人机正射影像和地形成果的精度影响有多大,这些是利用无人机遥感开展33.3 hm2以上坝区服务的过程中亟需解答的问题。为此,本文选择榕江县忠诚坝区,拟开展4个方面的研究:①利用高精度差分GPS获取地面控制点和检查点的高精度三维坐标;②应用消费级无人机大疆御2pro获取坝区正射影像和DSM;③研究像控点和刺点照片数量对定位精度的影响;④研究有无像控点对面积计算的影响。
1 设备介绍
使用大疆御2pro无人机、大疆GS PRO地面站软件和天宇C6 RTK高精度GPS测量系统,大疆御2pro采用了有效像素达2 000万的1英寸CMOS,相机传感器宽13.2 mm,高8.8 mm,机身小巧,起飞重量只有907 g,单块电池续航时间大于20 min;大疆GS PRO软件是大疆开发的地面站软件,支持测区导入功能(5次免费,其后收费)、航线规划也容易上手;天宇C6 RTK测量系统具有厘米级定位精度,可使用免费的网络RTK服务,只需携带一个移动站。
2 构建正射影像和DSM
2.1 研究区基本情况
研究区位于榕江忠诚大坝,属于贵州33.3 hm2以上坝区的万亩大坝,平均海拔两百多米,坝区地势较平,地貌多样,包括河流、农田、道路、居民区、丘陵等地类。
2.2 像控点和检查点布设及测量
为了检查有像控点和无像控点对正射影像平面精度和DSM成果高程精度的影响,布设了9个像控点,像控点为直径0.5 m的圆形靶标纸,分布于研究区四周,共布设了9个控制点和14个检查点,使用千寻账号登录的网络RTK方式对控制点和检查点进行观测,获取了高精度三维坐标,采用的坐标系为CGCS2000,大地高程作为高程系统。由于后期照片数据丢失找不到有些点的位置,故最终只采用了4个控制点和8个检查点数据。
2.3 航线设计及数据采集
使用大疆GS PRO地面站软件进行航线设计,事先使用奥维地图确定了研究区矢量,并且导入了大疆GS PRO地面站,到达现场后勘测了边界,根据实际情况修改了研究区的实际范围。最终测区为长约7 km,宽约2 km的长条形区域,设计无人机相对飞行高度296 m,地面分辨率7 cm,航向重叠率为80%,旁向重叠率为65%,采用等距间隔拍照,航线设计如图1所示。为加快作业进度,减少无人机在往返起飞点路上浪费的电量,根据航拍推进情况变换起飞点,总共飞行了20多个架次,拍摄了2 108张照片。拍摄完成后,导入PIX4D软件进行快速检查,通过生成的质量报告发现重叠率满足要求,外业工作满足需要,可以进入内业处理环节。

图1 无人机飞行航线设计图Fig.1 Flight route plan of UAV
2.4 数据内业处理
在获取航拍照片后,使用PIX4D软件进行内业处理,共进行了3次对照处理实验:第1次采用无像控点的处理方式;第2次采用有像控点,但每个像控点刺点的照片为5张;第3次采用有像控点,但每个像控点刺点的照片为9~11张。由于照片较多,每次实验耗时约28 h。初始化处理后,软件自动生成了质量报告,通过质量报告看到整体质量较好。经过初始化、DSM生成、正射影像生成等处理步骤生成了最终成果。像控点和检查点所在的位置如图2所示,检查点主要是便于识别的地物、如道路斑马线边缘、水泥桩边缘等。

图2 像控点和检查点所在位置Fig.2 Location map of image control point and check point
3 成果检查
成果检查采用平面误差、高程误差、平面中误差和高程中误差来进行精度评价,计算公式见(1)~(4):

(1)
高程误差:Zn1-Zn2
(2)
平面中误差:
(3)
(4)
其中an1、an2分别为第n个点的测量值和真值的横坐标值,bn1、bn2分别为第n个点的测量值和真值的纵坐标值,Zn1、Zn2分别为第n个点的测量值和真值的高程值。
航拍前已经通过RTK测量了检查点的三维坐标,将其作为真值,利用处理后的正射影像叠加DSM成果,找到检查点的位置,读取出正射影像成果和DSM成果上检查点的三维坐标,作为测量值;为了使3次处理实验读取的图上位置完全相同,每次读取精确到相同的像素上。最后计算出平面误差、高程误差、平面中误差和高程中误差,并进行精度对比分析,统计结果见表1和表2。

表1 部分点成果精度统计表(单位:m)Tab.1 Statistical table of products accuracy(unit:m)
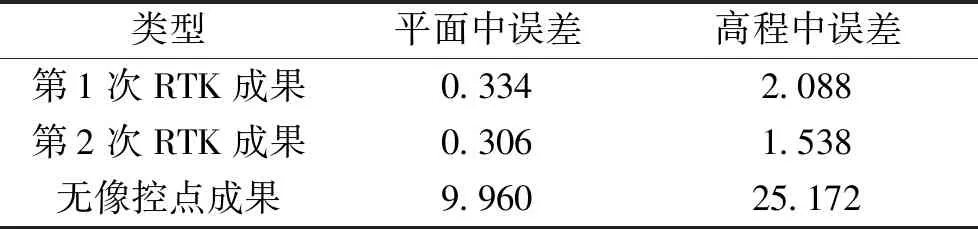
表2 中误差结果统计表(单位:m)Tab.2 Statistical table of mean square error(unit:m)
从表1可以看出,有像控点的结果(第1次RTK成果和第2次RTK成果)远远好于无像控点的结果,刺点的照片越多(第2次RTK成果),整体误差也越小。从表2中误差计算结果表明,具有像控点的成果平面中误差和高程中误差均远低于无像控点成果,中误差要小一个数量级以上。
4 像控点对面积计算的影响
随机选取坝区正射影像中的一个山体和一块农田作为实验对象,计算有无像控点对计算结果的影响,山体和农田的位置和情况分别如图3和图4所示。
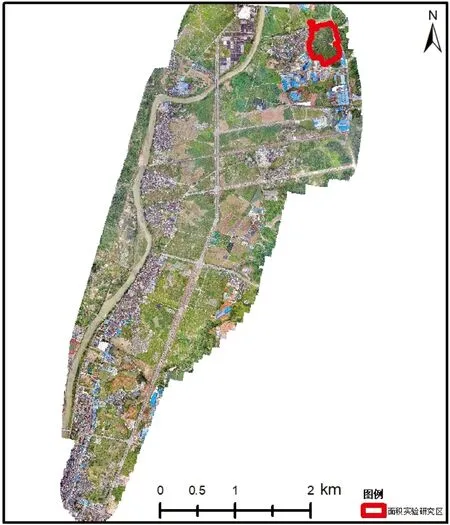
图3 面积实验的山体和农田在坝区的位置示意Fig.3 The location of mountain and farmland area experiment in the dam
从图4可以看出,无像控点的正射影像成果水平定位偏差比较大,前面成果检查已经有很好的体现,特别是大比例尺成果图上能更加明显的显示出这种差异(图4a比例尺是1∶1 500,4b比例尺是1∶12 000)。计算得出,通过无像控的DSM成果计算山体表面积为583 860 m2,有像控点的计算结果为527 313 m2,相差约10%左右;农田无像控点正射影像面积为1 315.16 m2,有像控点的结果为1 315.76 m2,面积几乎没有差别。因而,利用无人机作为坝区农田种植面积计算,可以不需要像控点,如果是计算山体等地形起伏大的对象表面积,则需要像控点来提高高程的精度,进而提高计算结果的准确度。

图4 面积试验范围(a:山体,b:农田)Fig.4 Area experiment range(a:Mountain,b:Farmland)
5 结论
实验表明,使用大疆御2PRO无人机结合少量RTK像控点可以得到定位精度较高的正射影像和精度较高的DSM成果,像控点数量肯定越多越好,但如果时间紧任务重,没有足够的时间布设像控点,则在研究区四个角布设几个像控点的结果会远好于没有像控点的结果,而且无像控点的DSM成果会影响地形起伏大的体表面积计算结果的精度,但如果只需要计算正射影像的面积,则无像控点对结果几乎没有影响,可以无需布设像控点,从而节省布设像控点的大量时间。
猜你喜欢
北京测绘(2023年1期)2023-02-23 13:25:10
汽车观察(2022年12期)2023-01-17 02:19:38
计算机应用文摘·触控(2021年20期)2021-11-11 01:43:05
计算机应用文摘(2021年20期)2021-05-30 18:27:46
农产品市场周刊(2020年10期)2020-07-24 16:31:47
华东师范大学学报(自然科学版)(2018年3期)2018-05-14 10:27:18
水利规划与设计(2016年7期)2016-02-28 15:06:37
遥感信息(2015年3期)2015-12-13 07:26:50
浙江大学学报(工学版)(2015年2期)2015-05-30 07:04:55
电测与仪表(2015年22期)2015-04-09 11:42:14