一种基于蚁群算法的串联电池组路径规划策略
2021-08-31 08:20:48陈洋程乐峰邹涛
综合智慧能源 2021年8期
陈洋,程乐峰,邹涛
CHENYang,CHENGLefeng,ZOUTao*
(广州大学机械与电气工程学院,广州510006)
(Department of Mechanical and Electrical Engineering,Guangzhou University,Guangzhou 510006,China)
0 引言
碳达峰、碳中和目标下,电动汽车、电力储能的发展势头愈加强劲[1]。为了给不间断电源、电动汽车等系统提供足够的电压,通常将电池串联使用。在此背景下,锂离子电池因功率和能量密度高、单体电池电压高、自放电率低、无记忆效应以及环保无污染等优点得到广泛应用[2]。应用过程中,导致锂离子电池间电压失衡的原因很多,如充放电阶段内阻差异等。电池在没有任何控制的情况下长期工作在失衡状态,能量储存能力会严重下降,最坏情况下还可能发生火灾或爆炸,因此,对串联电池组进行均衡控制显得很有必要且十分有意义[3]。
当均衡电路拓扑结构一定时,均衡系统性能主要由控制策略决定。目前,可用于路径规划的智能算法有很多,如人工势场算法、神经网络算法、遗传算法及网格算法等[4-6]。这些算法中,人工势场算法主要用于对底层的实时控制,但易陷入局部最优解,缺乏全局性的信息;神经网络算法擅长学习,但其功能网络结构过大,在多重障碍和动态的环境中,其神经元阈值随着时间的变化而改变;遗传算法具有良好的全局搜索能力,但其搜索空间很大,模型必须随着环境的变化而不断重新建立;网格算法可以阐明最佳路径,但其效率易受环境和网格密度的影响[7-9]。
蚁群优化算法作为一种智能搜索算法,与其他路径规划技术(如启发式搜索或潜在领域)不同,可简化为通过图寻找优化路径[10-11]。蚁群优化算法的主要特点是正反馈和并行性,目前在数据挖掘、电信路由优化、机器人路径规划、深度学习、图像处理、二次分配等领域取得了良好的效果[12]。
基于此,本文提出了一种基于图论的串联电池组路径规划算法,并采用蚁群算法进行求解,以在安全工作条件下实现均衡效率或速度的最大化。
1 双层均衡系统设计
1.1 系统结构
图1为本文提出的一种双层均衡系统结构,用于提高电池的均衡速度,降低系统复杂性。图1中的电池均为动力电池,每个电池单元由许多电池单体组成。电池单元可通过底部均衡器实现直接均衡,而电池单元间可通过上均衡器实现直接均衡。当失衡情况复杂时,需要同时均衡2个以上的电池单元,以获得更快的均衡速率和更高的效率。因此,有必要寻找一种基于最优算法的路径规划策略,以提高均衡效率,减少能量损失。

图1 双层均衡系统结构Fig.1 Structureof a two-layer balancing system
为便于分析和设计,做出以下假设[13]。
(1)所有开关均相同,包括寄生参数和能量损耗系数。
(2)相同类型的均衡器具有相同的能量损耗系数,而不同类型的均衡器能量损耗系数不同。
(3)底层均衡器采用飞渡电感结构,其中开关Qi,k为低导通损耗双向开关。
(4)能量可以通过公共的电感直接从源电池传递到目标电池。
(5)顶部均衡器采用多绕组变压器结构,以保证任何2个电池单元间能量的直接传递。
1.2 双层均衡系统图论模型
对图1中的主要电路元件,如电池、开关、能量存储元件等进行图的定义,以获得双层均衡系统的图模型,步骤阐述如下。
(1)有向图由N个节点、E条有向边和不同节点间的有序元素对组成。
(2)定义目标节点为能量流路径的末端节点,即起点或终点,对应于均衡系统中的能量存储单元,如电池、超级电容等。
(3)定义转换节点为能量传输路径中的一个节点,该类节点不是能量流的末端节点,对应于均衡器中暂时存储与释放能量的设备,如电感、电容或变压器。每个转换节点具有表示能量转换效率的参数η,存储在相应的转换系数矩阵中,规定相同类型的能量转换节点转换效率相同。
(4)定义节点-边的关联矩阵,其中包含有向图每个节点的行和每个边的列。对应于arc(i,j)的列只有2个非零元素,行中的“-1”对应节点i,行中的“+1”对应节点j。
(5)在arc(i,j)中,净流量是一个实值函数f(i,j),它可以被认为是从i到达j的一个商品量,该值可为正数或负数。网络弧中的流量必须满足能量守恒定律。对于转换节点,流入节点的总流量必须等于流出节点的总流量,并以转换效率的形式给出转换过程的损失。如果该节点是目标节点,对于某个源节点,它具有更多的外出流或接收流。
通过上述定义可得到均衡电路中各元器件的图元素模型,见表1。本文设计了基于表1中对应关系的双层均衡系统模型,如图2所示。
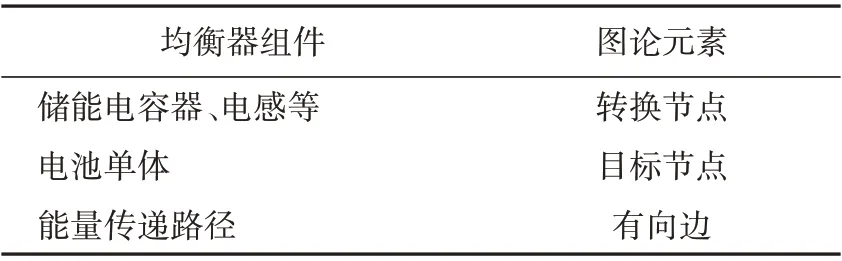
表1 均衡电路中各元器件的图元素模型Tab.1 Graph models of components in the equalizer
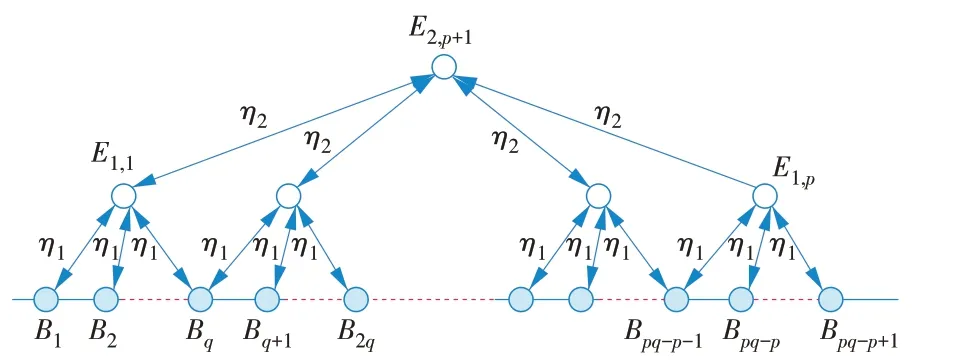
图2 双层均衡系统模型Fig.2 Model of a two-layer balancing system
在图2所示的模型中,电路元件被节点和边代替,用空心圆表示的均衡器由1个中间节点和k个目标节点构成。每个目标节点与1个中间节点和2条边相连。当底层均衡器数量为p时,有(k×p-p+1)个目标节点,(p+1)个中间节点和[p×(k+1)]条边。本文以13节串联电池组为例进行分析,该电池组被分为4组,每组4节电池串联,该双层系统的有向图模型共有13个目标节点、5个中间节点和56条边;同时可以看出,任何2个目标节点的传输路径必须经过至少1个中间节点。每种类型的中间节点都有一个唯一的功率转换效率,存储在转换系数矩阵中,每个边都有一个值,存储在入射矩阵中,代表节点和边的连接状态,可以根据连通性获得入射矩阵中的初始值,直接连接时该初始值为1,否则为0。
2 均衡问题描述
2.1 均衡规则
当检测到电池组量化后的瞬时最大电压差出现失衡时,均衡系统开始响应,即

式中:Δ(t)为每节电池的特征值与电池组平均值间的最大绝对差;vij为第i组第j节电池的特征值,可用VOC表示,既可表示电压也可表示荷电状态(SOC),vij可通过实际均衡系统实时测量获得,在仿真过程中需预先确定。
当测量的Δ(t)大于给定阈值CTH时,均衡过程开始。此时,可通过均衡加滞环控制来实现,即:当最大绝对差小于设定值时,停止均衡过程;否则,重复上述均衡过程直到VOC在精度范围内。
2.2 最优效率模型
均衡策略问题是一个优化问题,其目标是最大限度提高能量传输过程的效率,同时考虑系统约束和系统控制的复杂度,以确保电池电压均衡。因此,可将均衡问题描述成一个带有约束条件的优化问题,目标是均衡过程中效率最高。换言之,该问题可被描述成一个最短路径问题,其目标是规划能量转换和切换次数最少的能量传递路径,从而实现电池组间各单体电压的均衡。相关的均衡效率可定义为
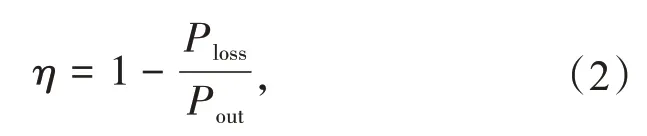
式中:Ploss为整个均衡过程中的总能量损失;Pout为整个均衡过程中源电池释放的能量。
为便于算法的实现,均衡的总效率用均衡过程中每条路径的效率ηpi表示,其大小由均衡过程中的能量转换次数和能量转换效率决定,由此可得第i条均衡路径的均衡效率为

式中:m为均衡过程中的能量转换次数;ηcj为能量转换效率。
进一步可得均衡过程的总效率,即
式中:fi为第i条均衡路径上的功率流;n为迭代次次数。
为保证整个均衡过程中效率最高,根据整个均衡过程的能量损失来定义均衡代价,由此可得整个均衡过程的优化模型。
代价函数为

式中:fa为每条边的能量流。
函数满足以下2个约束条件。
(1)目标节点
(2)转换节点

式中:vo为均衡后电池的VOC值,可以是电压,也可以是SOC值;voavg为串联电池组的平均VOC值;vis为第i条均衡路径均衡前起始节点的VOC值;vid为第i条均衡路径均衡前终止节点的VOC值;ε为每条边的VOC损耗;Ip为能量流入节点p的一组边;Op为能量流出节点p的一组边;μ为加权系数。
2.3 最优速度模型
当串联电池组出现严重失衡情况时,需要均衡系统快速响应以提高电池组性能。因此,需要快速均衡以缩短均衡时间,从而防止电池过充与过放。
根据电荷守恒定律,均衡时间可以表示为

式中:ΔQ为电池电荷变化量;Io为平均均衡电流;C为电池容量;Po为输出功率;ΔSOC为电池荷电状态变化量;ΔV为电池间电压差异;k为SOC变化量与电压变化量转换参数;VB为电池端电压。
均衡时优先考虑均衡速度最快,则可得到优化问题的目标函数为

满足以下2个约束条件
式中:ΔVi为待均衡2节电池间的电压差;Ioi为相应动作均衡器的平均均衡电流。
3 路径规划策略
3.1 矩阵定义
为及时进行均衡,算法需要实时检测电池的特性参数并判断电池的状态,因此,需要根据系统的图模型构建一些矩阵,以记录均衡系统状态并映射均衡系统拓扑中的变化。
(1)需求矩阵(D):一个行向量,包含每个单元的均衡能量需求,即与VOC平均值的偏差。
(2)单元优先矩阵(Lp):第1列包含单元格索引,第2列表示单元优先级。
(3)边流量矩阵(F):一个包含每个边的能量流的行向量。
(4)边状态矩阵(Ys):一个行向量,如果该边被选中,则包含1,反之则为0。
3.2 均衡算法流程设计
在电池均衡系统中,当检测出串联电池组中一系列的电压过高单体和电压过低单体并确定其所在位置时,通过高低配对,使得串联电池组中每个单体的电压均维持在设定的电压滞环范围内,并且均衡过程中能量损耗最小或均衡时间最短。基于此,实现均衡算法的主要流程如下。
(1)定义图中各矩阵:定义节点-边关联矩阵与需求矩阵并根据均衡器初始状态进行初始化。
(2)失衡状态检测:从均衡过程开始,根据电池VOC估计电池的状态至关重要。当检测到失衡节点时,在图中的每个节点上计算功率,以便更新需求矩阵D。如检测到该电池过度充电,则需求矩阵D中对应项目被赋予负值;如果电池过度放电,则需求矩阵D中相应项目被赋予正值。
(3)标注边的权重:检测失衡节点周围的边并根据能量传输效率为每个边分配一个标签。
(4)路径选择:选择满足算法的目标路径非常必要,该路径需要能尽量减少传输过程中的能量损失并确保每个电池的VOC在允许范围内。为获得每个节点的功率,需将边中的通量乘以关联矩阵,然后将这些值相加。最后,采用蚁群算法求解式(5)—(12)的优化模型。
(5)验证可行性:一旦选择某种方案,图上就会形成一个新的功率流分布,这种分配充分考虑了影响均衡速度的路径重叠情况。
3.3 蚁群算法求解步骤
用蚁群算法求解路径规划问题时,通常将问题等效成一个图G=(C,L),节点集C由问题描述中的电池组及其位置给定,连接边集合L是节点间的完全连接。一般来说,电压过高单体向电压过低单体均衡的过程可描述为蚂蚁以信息素和局部启发信息为指导,在图上爬行的过程。
在蚁群算法模型中,蚂蚁个体序号为k,蚂蚁总数为m,则k=1,2,…,m。串联电池组数量为n,当人工蚂蚁构建一个可行路径时,有必要对这n节电池从1到n进行排序。根据给定概率选择公式,确定每个节点被选择的可能性,其中具有传输值的节点依据一定规则被选中。节点i中的蚂蚁k可根据式(13)计算出访问节点j的概率。为防止蚂蚁再次走已经走过的电池位置,定义了禁忌表tabuk,以记录第k只蚂蚁是否已经走过某节电池所在的位置,禁忌表tabuk中的记录随着蚂蚁选择的不同而改变路径。

在每只蚂蚁构建完整的解决方案后,会根据信息素更新路径,然后,当前迭代中表现最好的信息素增强。通常情况下,信息素会依据下式进行更新

式中:ρ为局部信息素挥发系数,各路径都有相同的挥发规则,通常取值范围为ρ⊂[0,1);Δτijbest(t)为当前迭代中表现最好的信息素增强。
Δτij(t)为蚂蚁k在路径(i,j)上释放的信息素,其定义如下

式中:φbest为循环周期内的最佳解决方案。
基于此,本文提出一种基于蚁群算法的电池均衡路径优化方法,其流程如图3所示。

图3 基于蚁群算法的电池均衡路径优化流程Fig.3 Optimization flow of thebattery equalization path based on ant colony algorithm
4 13节串联电池组均衡路径分析
采用双层混合式结构的均衡系统图论模型如图2所示,取q=4,p=4。设定下层均衡器效率为0.90,平均均衡电流为0.8 A,上层均衡器效率为0.85,平均均衡电流为1.2 A,单体电压最大值为3.60 V,最小值为2.50 V,单体间的电压最大允许误差为0.10 V,即阈值CTH=0.05 V。均衡前,13节串联电池组中失衡单体数量众多、位置各异,如图4所示。电池样本中,深蓝色柱形表示各电池单体电压,黑色虚线表示13节电池电压平均值为3.15 V,2条红色实线表示电池电压上、下限值。从图4可以看出:13节串联电池组电池电压均值为3.15 V,有6个电池单体的电压高于设定的上限,称这种电压过高的单体为富能单体;有6个电池单体的电压低于设定的下限,称这种电压过低的单体为亏能单体。均衡前单体间的最大压差为0.72 V,因而需要启动均衡。
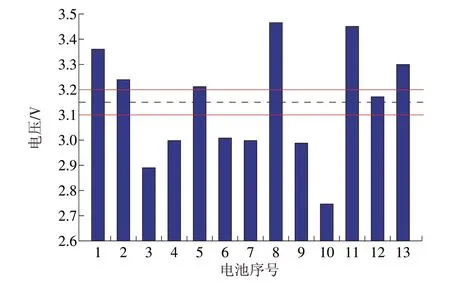
图4 13节串联电池电压Fig.4 Voltagesof the13 series-connected batteries
如果采用简单的均衡策略,均衡前、后单体电池电压如图5所示。由图5可见,均衡后各电池间的最大电压差都在0.10 V以内,整个均衡过程的损耗当量为0.394 1,均衡时间为42 400 s。
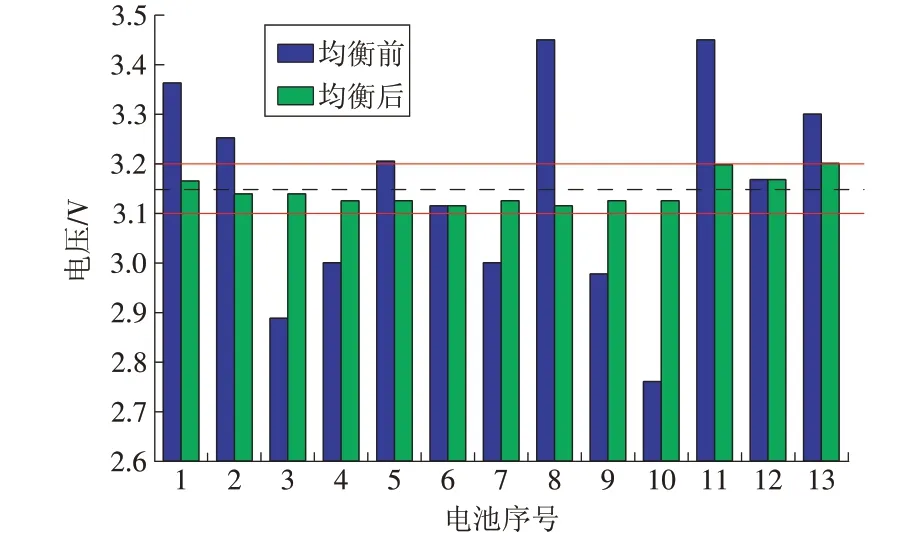
图5 采用简单策略均衡前、后电池电压Fig.5 Voltagesof thebatteriesbeforeand after taking the simple control strategy
对均衡系统效率最优即均衡过程能量损耗最小的均衡方案进行验证,优化后的均衡路径规划方案如图6所示。图中:蓝色空心圆表示电池单体,从左到右依次编号为1—13;空心圆中黄色底数字表示该单体电池传递能量的目标单体电池,如#1电池位置有一个黄色底的数字3,表示#1单体电池通过转换节点向#3单体电池放电,其他同理。由图6可以看出,在效率最优策略中,全部均衡路径都是在下层均衡器内,均衡能量传递更为直接,能量转换次数少,均衡过程能量损耗少,均衡效率高。
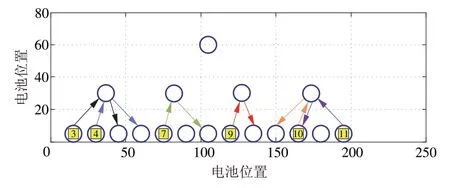
图6 效率最优均衡路径规划Fig.6 Equalization path with thebest effectiveness
对于速度最优均衡方案,均衡系统结构不变,取q=4,p=4。采取均衡过程速度最优即均衡时间最短的策略,优化后的均衡路径规划方案如图7所示。在速度最优策略中,从优化路径方案可以看出,规划出的路径绝大部分都集中下层均衡器,只有1条均衡路径通过上层。

图7 速度最优均衡路径规划Fig.7 Equalization path with the optimal balancing speed
均衡前、后各电池电压如图8所示,均衡后各电池间的最大电压差异都在0.10 V以内,整个优化过程的损耗当量为0.297 5,均衡时间为16 400 s。由此可见,本文提出的最短均衡时间控制策略同样效果良好。
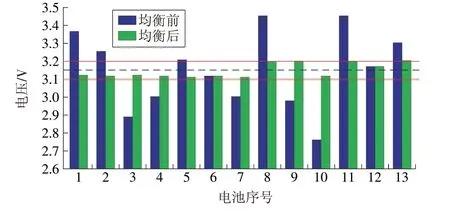
图8 采用速度最优策略均衡前、后电池电压Fig.8 Voltagesof the batteries before and after taking the optimal balancing speed strategy
5 结束语
本文研究了复杂失衡条件下长串动力锂电池组的均衡路径。在基于均衡器的图论模型和具体实现电路参数的影响下,建立了双层均衡系统的最优效率模型和最优速度模型并给出了蚁群求解方法。将上述最优模型应用于13节串联锂电池组均衡系统中,仿真结果表明:与采用简单策略的均衡系统相比,本文提出的均衡路径规划方法可以很好地应对长串串联电池组的复杂失衡情况,可有效缩短均衡路径并减少能量转换次数,在均衡速度和效率方面都具有较大优势。
猜你喜欢
中国军转民(2017年7期)2017-12-19 13:30:00
消费导刊(2017年19期)2017-12-13 08:30:52
电子器件(2015年5期)2015-12-29 08:42:39
大连工业大学学报(2015年4期)2015-12-11 04:06:50
电源技术(2015年1期)2015-08-22 11:16:14
电源技术(2015年11期)2015-08-22 08:50:42
电源技术(2015年9期)2015-06-05 09:36:06
中国卫生(2014年10期)2014-11-12 13:10:24
中国神经精神疾病杂志(2014年1期)2014-03-01 03:23:23
汽车电器(2014年5期)2014-02-28 12:14:15