水声信标搜索策略分析
2021-08-29 05:37田嘉伟海装沈阳局驻大连地区第三军事代表室
珠江水运 2021年15期
田嘉伟 海装沈阳局驻大连地区第三军事代表室
曲加圣 贺俊博 大连测控技术研究所
1.引言
随着海上作业活动的日益增多,由于天气灾害、机械设备故障等原因导致的作业人员、测试用仪器设备、试验装备等沉入海中丢失等水上安全事故时有发生。
目前海上针对水上作业的人员、物资设备和装备等指示位置的安全保护措施以光学、无线电、北斗等示位手段为主,解决了水上示位的问题。当这些目标沉入水下时,在茫茫大海中寻找犹如大海捞针。与此同时,受海上风向、海潮、海流等环境因素影响,更增加了海上寻找的复杂性与困难度,容易错过最佳搜寻时机。
水声信号是水中信号传播距离最远、最有效的信号形式,有规律的水声信号更是便于引导搜救船只和搜救人员的快速搜寻和发现。
水声信标作为一种超小型声纳设备,在水中能自动发射水声脉冲信号。水声信标外形呈圆柱体,整体密封防水,由一次性锂电池独立供电。水声信标在空气中处于断电状态、不工作;入水后,通过水介质导通金属壳体和用于控制信标上电的金属触点,激活信标工作,周期性地发射单频脉冲信号,通过功率放大和电声能量转换后,向水中辐射声波信号。
水声信标作为水下示位的声源设备固定在可能发生意外落水情况的海上作业的人员、测试用仪器设备、试验装备上,当这些目标落水后,为搜索人员提供可靠、稳定的示位声源信号。水声信标最典型的应用为装配在飞机的“黑匣子”上,用于飞机发生坠机落水事故时,指示“黑匣子”在水中的位置。
装配有水声信标的目标落水情况多为意外事故,有一定浮力的目标落水后其在水中的位置易受风、流等自然环境因素影响而发生变化,随着落水时间的推移其水下位置偏移的范围也会逐渐增大;落水后较重的目标沉入水底,随着落水时间的推移有被泥沙覆盖掩埋的风险。因此,为了保证落水人员、设备、物资的安全,采用合适的水声信标搜寻策略实现对这些目标进行快速、高效的搜索、定位至关重要。本文以飞机“黑匣子”搜索为例,浅析不同的水声信标搜索方法和策略适用的场景、技术特点和搜索效率,其他目标装配水声信标的搜索情况可以此作为参考。

图1 水声信标
2.水声信标搜索要求及救捞作业流程
当飞机在海上失事,落水前通常可以通过监控雷达、失事前的通讯等手段判断飞机海上失事的大致位置区域,一般情况下估算的区域面积会达到几十平方公里甚至更多,在某些特殊情况下,可能短时间内无法得到飞机失事时的具体海域位置,如MH370飞机失事地点。另外,飞机坠入海中往往会发生解体。
飞机“黑匣子”上安装的水声信标声源级约为160dB,其水中搜寻受海洋环境条件影响很大。复杂海况、温越层、混响、水下复杂地貌等对水声信标所发射的水声信号传播途径和距离将产生严重影响。在良好水文条件下最大作用距离能够达到2km~3km,在浅海复杂海洋环境下,如东海部分近海海域,作用距离只有500m左右;同时受电池供电的条件限制,水声信标在水中的连续工作时间是有限的,信标搜索设备从目标落入水中至到达事故海域开始搜索,也需要一定的准备和航行时间。
综合上述分析,水声信标的搜索过程要求:
(1)搜素策略保障:根据失事作业海域的区域、水深、作业时的海况、海洋背景环境情况和不同搜索设备的技术特点,确定使用的搜索设备和对应的搜索船只。
(2)搜索设备保障:水声信标搜索设备应具备快速高效搜寻探测能力,满足在大范围海域范围内短时间搜寻到目标的要求,在水声信标供电失效前及时完成搜寻和目标具体区域的确认,为定位及打捞作业提供时间和区域位置信息保障。
(3)搜索平台保障:水声信标搜索设备应具备快速部署能力,以满足搜救舰船、飞机搜索平台快速响应、及时到达作业海域进行搜寻探测的需求。
水声信标搜索过程的工作目标是在已确认的目标疑似落水区域内,对水声信标信号进行搜索和精确定位,为打捞船和潜水员水下作业打捞提供精确的位置信息。
目前,打捞船进行水下打捞作业通常采用潜水员水下打捞方式(通常不大于80m水深情况下)。采用潜水员水下打捞方式时,主要分为轻潜和重潜两种方式。潜水员一次下潜工作时间很短,尤其是重潜,且水下移动距离有限。为了帮助潜水员水下快速找到并打捞“黑匣子”,需要为其配备辅助潜水员搜寻水声信标的引导设备,满足潜水员水下便捷使用的同时,引导其快速找到水声信标及安装的目标。
水声信标海上搜所打捞作业流程框图如图2所示。
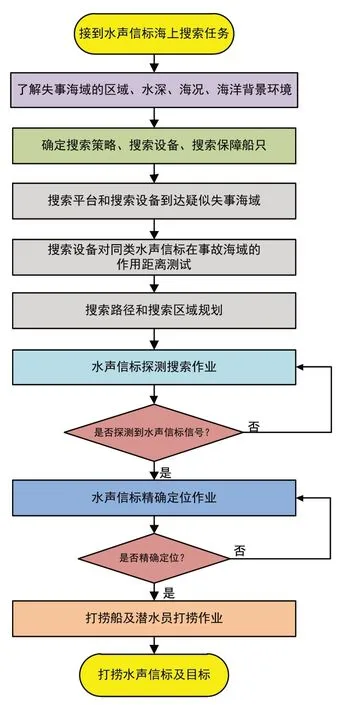
图2 水声信标海上搜素及救捞作业流程框图
3.水声信标作用距离分析
水声信标搜索设备的探测距离与信标的频率、海洋背景噪声的关系可通过声纳方程进行论证分析。
以信标频率为37.5k Hz、声源级160dB、探测距离2.0km来分析信标信号探测的可行性:
A)假设信标声源级

频率:37.5kHz;
信号形式为脉宽10ms,CW脉冲,重复周期:1s 。
B)背景噪声为三级海洋动力噪声。
被动声纳方程为:

其中声源级

2.0km处传播损失(中等水文条件)为:

其中r单位为km,吸收系数α为:

若f=37.5kHz,则

代入(2)式,得2.0km处TL为:
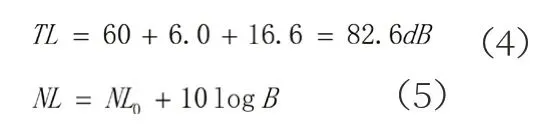
其中NL0为37.5kHz时谱级,B为带宽。
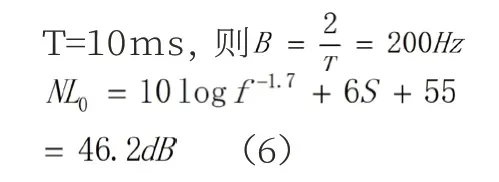
其中f 为信号频率,此处取37.5;S为海况等级,此处取S为3 。
代入(5)式得到背景干扰级NL为:

(三级海况,船漂泊,37.5kHz,B=200Hz)
检测阈DT为:

由上式可知在2.0km距离上搜索信标,搜索设备接收到的信标信号约有8.2 dB的信噪比余量,该余量对于2.0km水声信标探测是可行的。上述计算分析适用于一般情况下的中等水文条件,不同的海洋环境及其水文条件发生变化时,搜索设备对信标的作用距离也会随之变化。
4.搜索方法及搜索系统效能分析
4.1 作业海域搜索系统作业距离测试
条件允许情况下,在目标搜索水域进行实际搜索前,先确定搜索系统在目前水域的海洋环境下对水声信标的探测距离,作为系统搜寻策略的路径规划和区域覆盖的依据。
在海上布放一个与目标上安装的水声信标声源级相当的测试信标,利用搜索系统现场实测其对水声信标的探测距离,获得该海域搜索系统探测水声信标的真实作用距离,既保证了信标搜索的有效覆盖,又能最大程度的发挥搜索系统的作业效率。
4.2 拖曳式搜索系统
(1)工作原理。拖曳式搜索系统是在搜索船低速航向状态下实现水声信标探测。系统通过绞车、拖曳电缆与水下拖体相连接;水下拖体上安装有探测接收水声信标信号的水声传感器阵列以及姿态仪、高度计、深度计等辅助传感器;作业时搜索船通过绞车收放系统控制拖体的作业深度,并通过辅助传感器获得水下拖体的姿态;水声传感器阵列接收到的水声信号处理后经拖曳电缆传输至水面显控主机;水面显控主机实时接收和处理信号数据并进行信标信号识别和处理,并获取水声信标的方位信息。
典型的水声信标拖曳式搜索系统为美国搜索马航MH370飞机“黑匣子”时使用的T PL-25 型拖曳式声信标探测仪,其水下最大工作水深可达6000米,搜寻频段3.5k Hz~50kHz,拖曳速度1~5节,可在深海大范围搜索水声信标信号。
(2)搜索效率:拖曳式搜索系统作业时,搜索船处于低速航行状态,一般不高于10节。为了提高搜索效率,并考虑到搜索船只在转向时的回转半径,搜索船作业时一般采用“弓”字型搜索航行路线,如图3所示。

图3 拖曳式搜索系统“弓”字型搜索路线示意图
系统探测的水平距离按照1500米计算,为了可靠探测搜寻,相邻路线之间采用重叠覆盖,图中距离R以2000m计算,搜索船以5节速度(9.26公里/小时)航行,则一小时可以搜寻18.5平方公里,一天(按12小时计算)可以搜寻222平方公里海域。当系统发现水声信标信号后,通过水声传感器阵列单个探测点测向,成一定角度的两个以上的探测点定位的方式可实现水声信标的精确定位。
(3)设备特点:适用于能够收放拖曳式搜索系统的各类船只,系统与作业船只的适配性好;适用于浅海(搜索船只可到达水域)、深海等搜索区域较大的场景,大范围搜索效率高,可在高海况下工作;系统需要绞车收放系统配合,深海作业时,绞车收放系统体积较为庞大;对水声信标的实时搜索、方位辨识需要拖体姿态可控、并在信号采集处理传输等模块与水面显控单元的配合下实现。
4.3 船载“蛙跳”式搜索系统
(1)工作原理。船载“蛙跳”式搜索系统是在搜索船停船漂泊状态下将系统的水声探测基阵固定在船舷吊放至水中工作,按照规划路线逐个探测点完成水声信标的搜索,通过多个探测点的搜索排查,完成整个区域的搜索。
常用的探测基阵的阵元可以为多个全向性水听器组成短基线阵进行目标近距离的精确定位,配合以指向性水听器进行目标的远距离探测发现;也可以采用矢量水听器或水声传感器阵列进行单点测向、多点定位实现水声信标搜索及定位。搜索船采用上述逐个的搜索方法这里均统一归结为“蛙跳”式搜索方法。
(2)搜索效率。
①探测搜寻。在适合搜索船作业的海域及海况条件下,搜索船在搜寻海域停船后放下水声探测基阵,操作人员在搜索船上如在当前位置未发现信标信号,则利用搜寻定位软件,在导航界面确定下一探测点,引导搜索船机动至下一探测点,停船后继续搜索水声信标信号,重复以上步骤,扩大搜索区域,直至找到水声信标信号。
为了可靠探测搜寻,相邻探测点之间的探测区域采用重叠覆盖,如图4所示。单个探测点的搜索半径按照1000米、搜索6分钟计算,相邻2个探测之间搜索船需要6分钟到达并就位,一小时系统可完成5个探测点作业,搜索约13.7平方公里海域,一天(按12小时计算)可搜索约164平方公里海域。

图4 船载“蛙跳”式搜索系统搜索路线示意图
②目标定位。搜寻到水声信标信号后,通过系统的引导靠近水声信标。在近距离范围内,操作系统主机的搜索软件,在软件界面记录当前位置获得的一条定位射线,然后引导搜索船至与该探测点具有一定夹角的下一探测点,利用同样的方式探测水声信标信号,操作搜索软件获得另一条探测射线,结合北斗/GPS的位置信息,可解算出两条射线的交点,获得水声信标相对于大地的位置坐标,完成精确定位操作。
(3)设备特点。
①系统作业时需要频繁的搜索船机动和探测基阵的收放;
②适用于船舷便于收放探测基阵的各类中、小型船只;系统的探测基阵结构需要与搜索船的船舷结构适配性安装,船舷距离水面距离不能过大,否则会影响基阵的稳定性和布放回收的难度;
③适用于浅海(搜索船只可到达水域)、深度不大于1000米的深海海域,一般在不大于四级海况下作业;
④系统便于安装,可操作性强,探测、定位能力能够满足大多数场景的搜寻定位需要。
4.4 无人平台“漂浮式”搜索系统
(1)工作原理。无人平台“漂浮式”搜寻系统是通过在浮标、水下无人航行器(UUV)等无人平台上安装水声传感器和信号处理装置,通过无人平台的位置移动实现其覆盖区域内的水声信标信号搜索。当发现信号后,通过无线通信方式将信息发送至搜索舰船或搜索飞机。

图5 船载“蛙跳”式搜索系统水声信标定位示意图
(2)搜索效率。自由漂浮的无人系统在海风、海流、涌等自然条件作用下移动搜索。以非锚定式的浮标为例,根据某海上试验测得的数据,40 分钟浮标可漂离布放点1000 米。按 照单枚浮标搜索半径为500米计算,相邻浮标的投放距离为1000 米,10枚浮标1小时可搜索约16.5 平方公里,一天(按12小时计算)可搜索约198平方公里海域。当发现水声信标信号后,在该区域内成一定角度投放多个(三个以上)浮标可组成水声长基线阵实现水声信标的精确定位。
水下无人航行器(UUV)配装水声传感器可在低速航向下完成水声信标的探测,其探测方式与拖曳式搜寻系统类似。搜索半径500m计算,UUV以3节速度(5.56公里/小时)航行,则一小时可以搜寻约5.6平方公里,一天(按12小时计算)可以搜寻67.2平方公里海域。
(3)设备特点。
①适用于能够布放浮标和UUV等无人平台的各类舰船和飞机平台,系统与平台之间无适配性问题;
②适用于浅海、深海等各类搜索区域;
③系统工作方便,投放后系统根据设定好的参数自主工作,搜索效率受自然条件影响较大,搜索区域存在随机和不确定性;
④系统主要用于探测和搜索,需要定期对系统的搜索结果进行接收。
4.5 便携式搜索系统
(1)工作原理。便携式搜索系统主要用于潜水员手持水下搜寻水声信标使用。其原理为采用指向性水听器或水声传感器阵列的波束形成方法,其水声接收探头具有一定的指向性,一般指向性开角不大于±15°。探测时,潜水员手持该系统像操作“手电筒”对水声信标进行搜索。当搜索设备指向水声信标在指向性开角范围内时,信号强度变大;水声信标超出设备的指向性开角范围时,信号强度明显变小或接收不到,通过该方式引导潜水员向信号强的方向移动,引导其找到水声信标及其安装目标。
(2)设备特点。
①适用于潜水员水下手持使用;结构上安装简易探测支架也可用于工作艇、小型船只在良好海况下搜寻作业使用,此时搜索方式和搜索效率参考船载“蛙跳”式搜索系统;
②设备整体密封,具有信号强度的显示功能;
③其信号通过降频的方法,可直接以人耳能够听到的音频信号形式输出,潜水员通过水密耳机收听。
4.6 其他技术手段的搜索技术
在某些情况下,搜寻作业海域环境背景噪声高、信标信号受到遮挡及水下混响等因素会严重影响对信标信号的探测效果,这种情况下对信标的远距离探测和高精度定位是一个难题;另一方面,由于水下地形地貌复杂,光线少,流速急等因素给打捞作业带来很多困难,而潜水员水下作业时间有限,常常需要精确的目标定位才能满足快速高效打捞的要求。复杂环境精确定位技术是辅助打捞设备的一项关键技术。
该技术的解决途径有:
(1)采用回声测深原理的侧扫声纳,其声学换能器阵装在侧扫声纳的拖曳体中,走航时向两侧下方发射扇形波束的声脉冲,利用“声波阴影”判断物体高度并形成图像,搜索MH370时美国海军使用的“蓝鳍金枪鱼-21”即就是采用该技术手段的搜索设备。
(2)采用海洋磁测技术发现信标及其水下目标磁场,使用磁探设备的方式类似扫雷具,在复杂声学环境下可近距离精确探知目标位置。
5.结语
如本文所述,各搜寻系统都有其技术特点和适用范围。实际使用时,需要根据作业区域的水深和海况条件、疑似区域范围、搜索船只特点选择适合的搜索设备。海上目标探测搜索是实际工程作业,需要不断积累实际作业经验,不断完善技术手段、优化搜索策略,才能提高搜寻定位打捞保障能力。
目标海上发生落水一般为突发事件,尤其像“飞机黑匣子”这样的重要目标发生落水事故后需要紧急进行搜寻定位保障,准备过程通常是时间紧任务重,并且很难获得足够的失事现场情况信息,容易造成设备准备不充分,就会导致海上作业时无法充分发挥设备技术能力,降低作业效率,甚至有可能延误最佳时机。另外只有搜寻定位及打捞各个环节相关的人员及设备、各个环节之间衔接到位,操作人员做到默契配合,才能事半功倍。
猜你喜欢
铁道通信信号(2018年3期)2018-04-19
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
少年文艺·开心阅读作文(2016年3期)2016-03-18
儿童故事画报·智力大王(2015年10期)2016-01-27
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
文理导航·科普童话(2015年6期)2015-07-29
海军医学杂志(2015年2期)2015-02-27
水道港口(2015年1期)2015-02-06