
新型汽车智能避险系统设计*
2021-08-27 02:12景洪昌马宇慧王玥依郑文栋柳思慧
科技与创新 2021年16期
景洪昌,杨 涛,朱 军,马宇慧,王玥依,郑文栋,柳思慧
(湖北师范大学电气工程与自动化学院,湖北 黄石435000)
1 背景
目前,根据不完全信息统计,平均每5 min就有一起交通事故发生。这些交通事故除了很大部分由酒后驾车导致的之外,其余很大部分是由汽车超速导致。当车辆达到极高速度时,一旦遇到突发情况,驾驶员很难及时冷静地去控制车辆的转向及平稳性,最终会造成惨烈碰撞或车身的剧烈翻转,这就会严重影响到驾驶员和乘客的安全[1]。
目前在汽车安全方面国内外已经做到了智能化调节,但并不全面,还会受到距离的限制,距离过远就起不到相应的作用。为了让汽车达到安全防护及驾驶员能及时地收到讯号,及时应对危险的来临,设计出一种汽车自适应控制调节系统,即汽车智能转角调节与辅助驾驶系统。
2 系统基本原理
本系统是以单片机为主控芯片,通过程序算法和外围设备的辅助,实现对各个传感器模块的控制。新型智能避险系统采用STM32F103ZET6单片机作为其内部核心,测速采用霍尔传感器,测距采用超声波测距模块。STM32F103ZET6单片机引脚拥有144个电平管脚,起初电路默认为一个高电平。当传感器的内部机制检测到外界数值变化时,引脚相应输出TTL高电平变化信号。通过外部控制线与单片机引脚连接,当此单片机检测到外界电平变化时,执行引脚相应的算法及函数[2]。系统的构成及原理如图1所示。
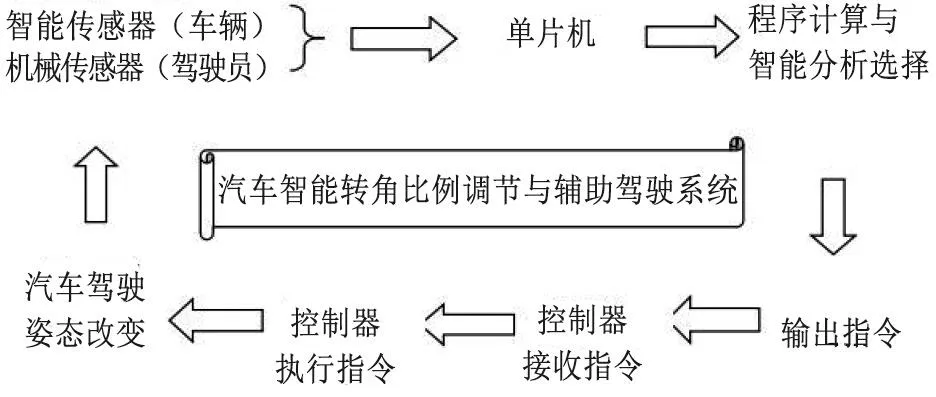
图1 系统构成及原理
3 硬件设计
3.1 主芯片
根据系统实际性能和实现控制要求的原则,要选择适合本系统的主控芯片,使系统能够按照设定要求正常、稳定地运行。经过反复研究和实验,最终采用ARM公司出厂的STM32F103ZET6为32位单片机,如图2所示。此芯片是由单片机、时钟电路、复位电路、晶振电路、指示灯电路、I/O扩展接口和JTAG接口共同组成。外部有144个管脚,工作电压为2.0~3.6 V。STM32F103ZET6性能较高、运行速度快、抗干扰能力强,具有长寿命、低功耗的特点。时钟电路的晶振频率是8 MHz,采用LQFP48封装格式,RAM为20 KB,FLASH为64 KB。并且STM32F103ZET6支持在线仿真,能够接受JTAG和SWD的调试,JTAG接口能为单片机下载固件。

图2 单片机外部结构图
3.2 超声波测距模块
由于HC-SR04超声波指向性强,检测迅速、使用方便,易于做到实时控制,在介质中传播距离较远,而超声波经常用于距离的测量,因此本系统是采用超声波测距进行反射计时信号探测,如图3所示。超声波计数器向某一个方向发射超声波,同时计数器启动反射计时。超声波在空气中进行传播途中一旦碰到了障碍物表面的阻挡发生反射,超声波接收器就会接收到该反射信号,立即自动停止计时并计算出所测距离。

图3 超声波测距原理图
3.2.1 超声波脉冲发射电路
由555构成的超声波发射电路如图4所示,由NE555定时器产生40 kHz的脉冲发射信号,加到高频超声波发射探头的两个引脚上,使内部的两个压电共振晶片之间产生压电共振,向外滤波发射高频超声波。
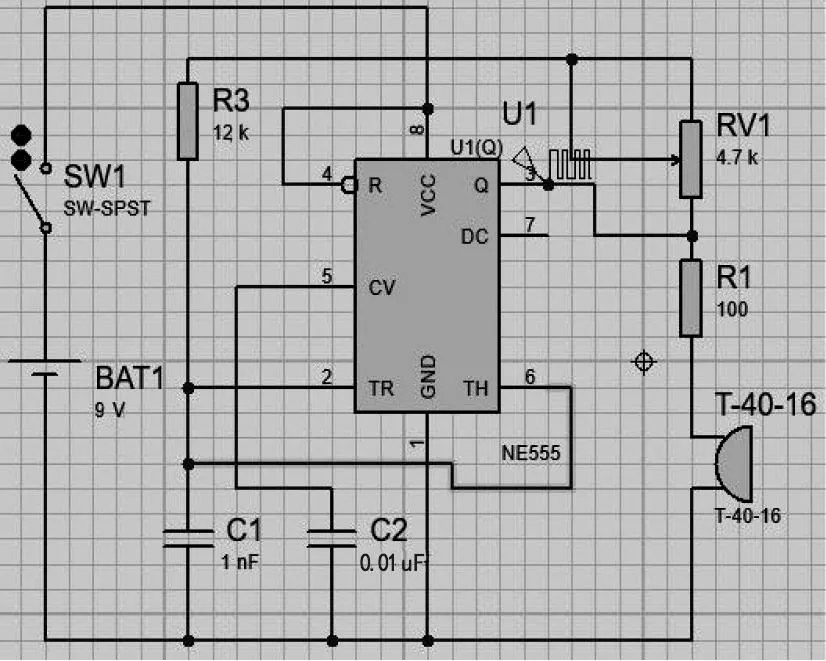
图4 由555构成的超声波发射电路
3.2.2 超声波接收电路
主要采用了集成信号放大芯片对信号进行放大处理。HC-SR04超声波测距控制模块主要是为工业用户自生提供了一种非接触式的测量距离自动控制的功能,通过查阅相关技术手册和实验得知,测距的准确性最高可以到3 mm。该模块由超声波信号发射器、接收控制设备与自动化控制电路等部分构成[3]。
采用I/O口TRIG触发测距,给至少10μs的高电平信号。模块自动向一个输入通道发送8个40 kHz的正弦波,自动地检查是否有一个正弦波,从而确定检测到有无正弦波信号回归。有信号返回时,通过I/O口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
测试距离=(高电平时间×声速)/2。超声波时序图如图5所示。
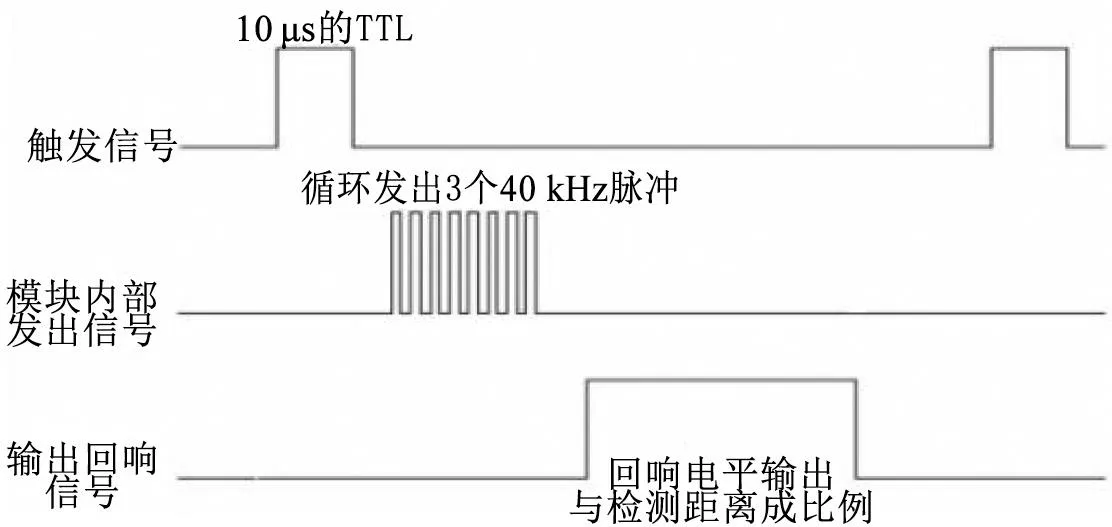
图5 超声波时序图
通过超声波反射回来的时刻进行计算后即可准确地判断出汽车前方的距离,并且通过单片机控制汽车的速度。
3.3 光敏传感器模块
汽车在夜间相会时,前大灯会有远光灯转换为近光灯的过程。为了有效控制汽车前大灯远近灯光的控制,此系统采用光敏传感器和单片机构成一个汽车前大灯光的自动控制系统,如图6、图7所示。
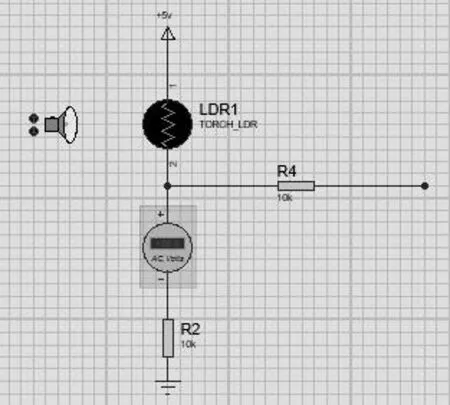
图6 光敏电路局部图
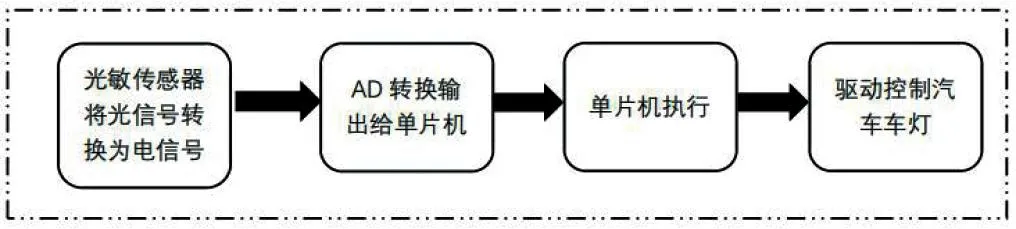
图7 光敏设计原理框图
灯光转换条件如表1所示,光辐射信号的测量分析和数据采集可有效地控制和保证两辆汽车在夜间安全地行驶,当两辆汽车夜间在街道上相会距离120 m时,为汽车的一个前大灯最小照度系数6 LX[4]。

表1 灯光转换条件
硬件电路:本系统使用了集成信号模块、AD转换器等其他小部件。
信号采集模块:采用的光敏传感器能够灵敏地识别来往车辆的直射光,将其光信号转为电信号,并通过AD转换。
车灯精准识别控制:能够有效地对AD(模/数)转化过程中产生的信号和照明灯进行分析和处理,准确并快速地实现了汽车远近照明和灯光的转换,避免因其他因素造成汽车灯转换失误。
3.4 霍尔传感器
在此系统中,需要测量汽车速度这一参数,因此本文用到了简单可靠且精确的方案来测量转速。
以上述STM32F103ZET6单片机为实例,单片机与单极霍尔开关电路YH543为基础和核心,构成一个简单的测速器件。此装置与显示器配套,可以实时显示被测对象的转速。按照这方案所制成的测速器件可以在多数中低速场合中应用[5-6]。
YH543是由霍尔电压自动信号电压调整器、霍尔电压自动信号发生器、差分信号放大器、史密特触发器和集成式电极开路的各个输出级所组成的磁敏式电压传感器,其输入级别为其磁感应的强度,输出级别是一个数字化的电压信号,其外型如图8所示。
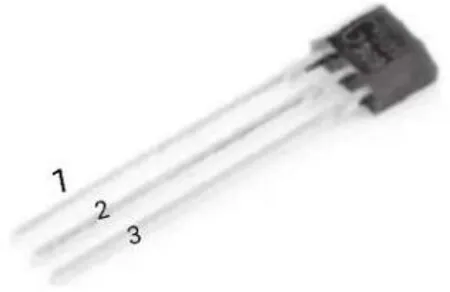
图8 霍尔元件
3.4.1 使用方式
引脚1:电源。
引脚2:接地。
引脚3:输出。
在使用时注意引脚1和引脚3加一个上拉电阻。
3.4.2 测速总体方案
霍尔元件开关是一种新型的全方位电平磁敏极性元件,采用全方位极性霍尔开关时,当高磁性强的物质靠近霍尔元器件时,输出一个低电平信号,离开则输出一个高电平信号。所以要在被动检测这个物体的转动对象上,先直接嵌入一个小型化的磁钢,然后把霍尔元件的转动轴和探头直接转动固定在旁边,靠近和远离霍尔元件的这个过程,为一个电平的跳变。然后此时,单片机时钟自动地开始采集这些所有脉冲输入信号,并对1 s内所有根据脉冲输入信号频率产生的所有脉冲输出信号频率进行计数,便可完成转速的检测。本测速装置工作原理如图9所示。
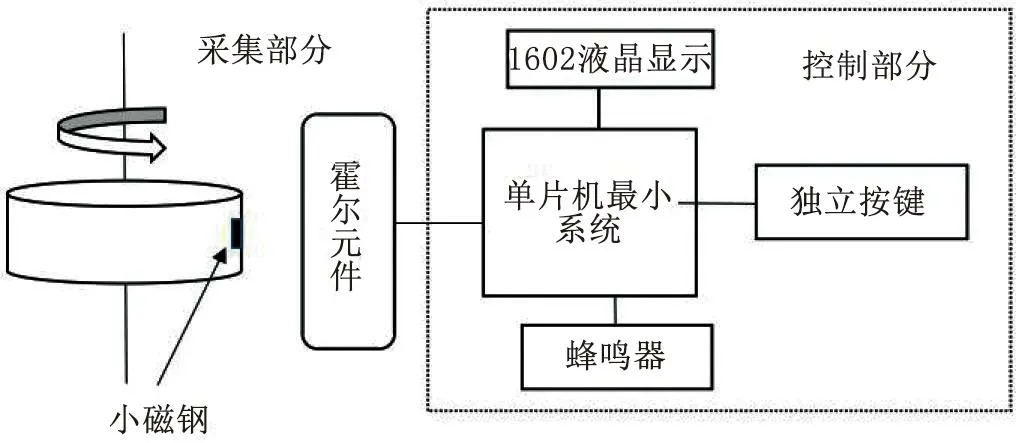
图9 测速装置原理框图
最小系统:主要对外部脉冲信号进行采集。完成计算、控制键盘、显示、报警等功能。
LCD1602液晶数字显示控制模块:可以显示两行字符或者数字,在此系统中,让其第一行显示齿轮的转速。通过齿轮转速和车轮的大小计算出车辆的行程,显示在第二行。
独立按键:S1为功能键,S2为加数键,S3为减数键,S4为确认键。这四个键可完成大部分的功能设置。
蜂鸣器:如果汽车超速可以用于超速报警。
3.5 人体红外热释电传感器
行驶在复杂多变的环境中时,需要对前方人流量实时监测,从而进行判断,但传统的摄像头采集的图像信息已经不适用复杂的环境,而且成本过高。红外热释电并不需要额外加红外发射装置,只对一定温度的热源敏感。更能够适应复杂多变的场合,可以对人体位置精准定位。
3.5.1 热释电基本原理
由于人体恒温大约为37℃,所以人体通常会发出10μm左右的紫外线,而红外热释电传感器其滤光片能够通过的范围为7~10μm的紫外线光谱,其他波长都不通过。由于滤光的灵敏度不高并且测得的范围不是很广,因此,要在传感器天窗上装上菲涅尔透镜。如果仪器不装菲涅尔透镜电子传感器,其电子探测器得到的最小半径大约在2 m,配上菲涅尔透镜的仪器探测到最小半径高达10 m[7]。用作安防的菲涅尔透镜分为若干个不同的聚焦区域。其由“高灵敏区”和“盲区”组成,当人体在其探测区域活动时,人体会经过由菲涅尔透镜划分的不同的聚焦区域,而不同区域存在着无法接收红外辐射的盲区,经过热释电所接受的辐射能量发生变化从而输出电信号,实现对人体的位置的精准检测。并配合着蜂鸣器进行语音播报,从而有效地检测驾驶员的操作是否正确,并进行改正。
3.5.2 热释电人体定位原理
本系统采用了人体红外热释电传感器,将此器件用于人体的定位。通过软件控制,系统进行正常工作,将探头检测到的红外光谱信号转换为相应的电信号,经过AD转换、放大、比较电路,送至单片机。
系统通过软件查询和识别、来对实时传输的声光报警状态信息进行控制。从而完成相应的控制动作,此报警信号经过一段时间才被解除或者人工操作进行解除。红外人体定位检测系统如图10所示。
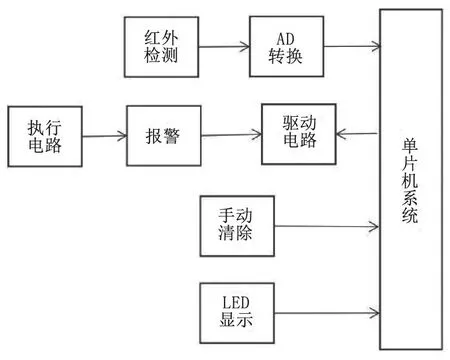
图10 红外人体定位检测系统框图
3.5.3 测试分析
测试分析步骤如下:①首先将热释电传感器放在一定位置,使人体逐渐靠近,测得其测量的最大范围。②在一定位置上,测得其与探头的距离,间隔一段时间内出现被测物,从而测得最小反应时间。③固定探头,被检测物从一个竖向最小的距离往两侧逐渐延伸扩大,测得最大测量的角度。④在红外热释电的测量范围内,放入不同的物体,可知什么物体能够干扰传感器的测量。⑤测量结果。通过人体定位实验,在实验场景中选取16个坐标点,测量多组数据,把每个测量左边对应点相加,除总测量次数10,最总得到如图11所示的检测结果。在偏离程度可接受的情况下,得到传感器有效测量范围如表2所示。

表2 人体红外热释电测量结果
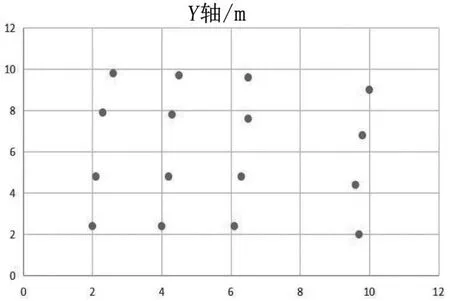
图11 人体定位实验
4 总结
本文介绍了新型汽车智能避险系统设计,包括系统构建、软硬件设计以及整体的调试测量。通过人体红外传感器来监测驾驶员是否误操作,该系统制作成本低、安装方便、抗干扰能力强。通过智能灯光系统能够提高汽车在夜间行驶的安全系数,同时利用超声波测距和霍尔传感器进行测速,并根据人体红外热释电所测得的外界情况,实时对车速和转向角度进行调节,实现有效避障。此新型安全避险系统的设计及构造可应用于汽车智能驾驶领域。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
军民两用技术与产品(2021年7期)2021-10-13
青年文学家(2021年21期)2021-09-05
军民两用技术与产品(2021年10期)2021-03-16
现代电子技术(2019年4期)2019-02-20
小天使·六年级语数英综合(2018年10期)2018-10-15
中国体育科技(2018年2期)2018-04-24
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15
中国新通信(2017年1期)2017-03-08
