基于太阳能无人艇的海洋气象观测系统及其 初步试验
2021-08-25 11:10陈洪滨李军马舒庆魏应植赵宇
气象科技 2021年4期
陈洪滨 李军 马舒庆 魏应植 赵宇
(1 中国科学院大气物理研究所,中层大气和全球环境探测重点实验室,北京100029;2 南京信息工程大学,气象灾害预报 预警与评估协同创新中心,南京 210044;3 中国气象局气象探测中心,北京100080;4 福建省厦门市气象局,厦门 361012)
引言
在中国经济发达的沿海地区、海岛以及濒临海域,经常发生灾害性天气,包括大风、暴雨、大雾和海上强对流天气等,每年都造成很大的人员和经济损失[1-3]。为了增加对海上天气系统生成与演变规律的科学认识,提高海上和沿海地区气象预报的准确率以及防灾减灾的能力,需要多种观测平台和观测技术提供海上气象水文要素信息,包括卫星遥感、岸基和岛屿地面气象站与气象探空站网、油气平台和船舶自动气象站、海上锚定浮标、漂流浮标(包括飞机投掷的)、有人驾驶飞机下投探空、无人飞行器探空和岸基多普勒天气雷达等[4-11],但已有的这些平台和技术所提供的资料与陆地站网相比,在时空覆盖和分辨率方面还有很大差距,远不能满足当前科学研究和业务工作的需求。为了解决大洋上大气和海洋观测资料不足的问题,国际上有两个发展趋势[12-13]:一是提高地球观测卫星的遥感能力,发射更多搭载多种遥感器的卫星,应用多波段和主被动结合等技术提升气象和海洋天基遥感能力,不断改进多源资料融合和模式同化技术;二是针对重点区域和特定大气海洋现象或科学研究目标,开展海上加强观测试验研究,使用岛基、科考船、有人驾驶和无人驾驶飞机等平台,同时布设或投放阵列浮标和漂流浮标,以获取大气和海洋的多要素综合观测资料。
随着卫星导航、无人驾驶、卫星通讯和数字化传感器等技术的发展,近20年来国内外科技人员已研发了数种基于无人水面艇(USV:unmanned surface vehicle)和自动水下航行器(AUV: autonomous underwater vehicle)的海洋气象与水文观测系统,具有长航时、自动部署、人员安全等优点。例如,美国Liquid Robotics公司于2007年研制成一种水面穿浪器(wave glider),由波浪能提供航行动力,上部太阳能板收集太阳能为定位、探测传感器和通讯等子系统提供能源,可以连续一年以上以走航或驻点方式实时收集和发送海洋气象水文观测数据。该型穿浪器单艘航行最大距离达9384海里,历时14个月横跨南北太平洋,经历过恶劣的海况,实时获得了海面气象要素及海温、海盐和海流数据。Lenan 和 Melville[14]使用该型穿浪器穿过热带气旋时的原位观测资料,对气象要素的变化进行了分析。2014年4月,美国国家海洋和大气管理局(NOAA)与Liquid Robotics 公司签署了合作协议,旨在提高海洋天气预报和海洋环境监测能力;合作已显示海面无人穿浪观测数据与NOAA的数据分析和模式相结合提高了飓风预报、CO2的观测和北极海洋环境的监测能力。
美国Saildrone公司于2009年,成功研制一款自动驾驶双体帆船(SD1: saildrone 1),完全利用风帆推进航行,平均航速3~5 kn,最大速度可达14 kn。 在2013年底,一艘SD1在太平洋海上航行超过100天,航程超过8000 km。该公司与美国海洋科学技术基金会(MSTF)合作,计划在将来用SD1取代海洋中的锚系浮标,进行各个大洋上的气象观测(http://saildrone.com)。
近十多年来,我国一些部门也大力开展无人海洋航行器(UMV: unmanned marine vehicle)的研发与应用工作,从无人水面艇到深海水下滑翔机的海上试验时有报道[15],但其实用性和可靠性等有待验证与提高。总之,研发和应用多种类型无人驾驶平台的探测技术是当前海洋环境监测领域的一大发展趋势,为国际各大海洋观测组织和计划所推荐[16-17]。
自2013年,本团队基于卫星导航与通信、自动驾驶和数字传感器等技术,开始研发一种基于全太阳能无人艇的海洋气象水文探测系统,命名为MWO-I(Marine Weather Observer-I);2015年4月原理样机在福建东山县海域下海测试,随后几年进行了多次海上试验,不断改进和验证其实用性和观测能力。本文对这一长航时太阳能艇海洋气象观测系统进行介绍,并给出2018年4月一次海试个例的初步探测结果。
1 系统的介绍
MWO-I系统具备的主要功能有:长航时自动驾驶、抗恶劣海况、自动探测海面气象要素、实时监控工作状态和传输数据。设计的原则是:①小型化,随浪性好, 便于运输和释放与回收;②模块化,易于集成安装和调试,便于加载轻小型气象和水文传感器;③高可靠性,能够长时间工作,适应各种天气和海况,即在强风浪高海况下能够生存。系统的主要组成有:太阳能无人艇平台、艇载传感器与资料采集子系统、卫星通讯模块、陆基子系统(图1)。

图1 太阳能无人艇海洋气象探测系统(MWO-I)组成
1.1 太阳能无人艇
太阳能无人驾驶艇是实现自动部署、机动航行探测的平台。根据设计原则,研发的无人艇主要技术参数列于表1,其主要组成包括艇体、电动动力推动装置、太阳能电力装置和计算机控制装置(图2)。
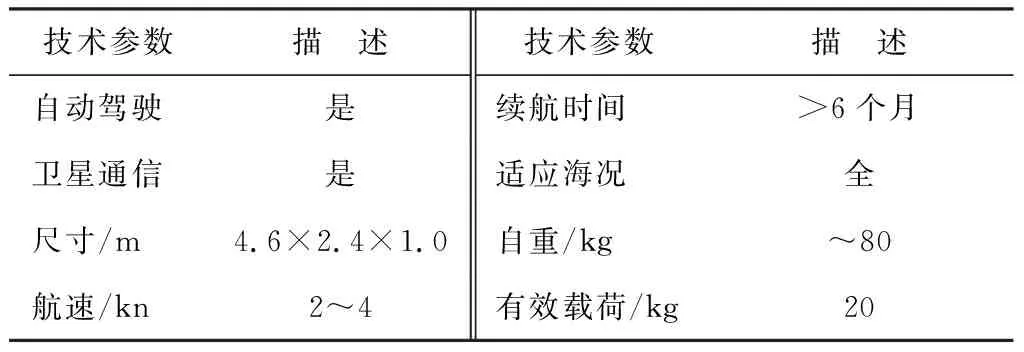
表1 太阳能无人驾驶艇主要技术参数
无人艇整体结构如图2所示,艇身采用双体结构,双浮筒大部分位于水线之下,其质量约占全系统的70%,所以具有较好的稳定性和随浪性。艇体尺寸的选择不仅考虑了有效载荷的承载能力,还考虑了陆上运输的便捷性,即在不拆卸的情况下,一辆小型箱式货车可以运输两艘。这样,运抵海边后,可减少安装调试时间和难度,便于快速布放。

图2 太阳能动力双体无人艇设计效果(a)和实物(b)
为了实现超长航时并考虑到减排环保,无人艇可选的洁净能源有太阳能、风能、波浪能及其组合。本系统采用易获取和易改造安装的太阳能供电技术。太阳能膜贴敷在艇身上方的平板上,平板内不仅有金属支撑骨架保持强度,还有泡沫垫层在半潜状态时产生浮力。太阳能板转换的电能传送至安放在浮筒内的蓄电池组,然后向动力推进装置、气象探测仪、通讯装置和计算机控制装置等供电。在晴天条件下,太阳能电力装置能够提供平均约600 W的输出功率,在多云天气下白天也能提供无人艇推进与探测和通讯所需的电力。在白天蓄电池充满的情况下,能够满足夜晚MWO-I低速航行与探测的需要;在极端连阴天的情况下,自动关闭动力推进装置,能够保障一周时间的连续探测与通信的供电。
无人艇由纯电动动力推进,双推进器装置在浮筒后部,用于推进无人艇前后运动,并通过左右推进器速差控制调整艇的运动方向。推进器螺旋桨外加一金属网罩,虽然增加了一点阻力,但可以防止大部分水中杂物对螺旋桨的直接撞击与缠绕等影响。
太阳能蓄电池置于浮筒内前部,而推进器位于筒体的后部,调节位置即可保持前后平衡。在艇筒体的中段隔离出一段压水舱,对其注水和排水能够实现无人艇整体的下沉半潜和恢复上浮。半潜下沉是为了进一步增加其稳定性和抗倾覆性,增加无人艇抗风浪的能力。因此在太阳能艇上设计和加装了进排水装置,与艇载计算机控制装置连接,实现压舱水箱中的水量调节。 在5级以上的高海况时,自动或远程指令控制开启水泵,向两个筒体压水舱内注水,使艇体整体下沉,但太阳板仍位于水面之上(需时约3 min)。此时,无人艇吃水深度增加,处于半潜状态,艇在水中的稳定性及抗风浪能力得以进一步提高。当风浪较小时,自动或远程控制排水,艇体上浮,水中阻力减小,有利于MWO-I的航行探测与机动部署。这一半潜功能的实现是本系统的一大创新点。
1.2 艇载气象传感器
本系统选用一款通用的船载小型自动气象站,用于探测海面大气温度、湿度、气压、风速和风向,并输出数据到计算机控制装置保存,再由北斗通讯机发送回陆基子系统接收处理。此型自动气象站具有测风姿态和航向的自订正功能,在太阳能艇上安装之前,进行过车载和无人机搭载的测试,证明了其在运动状态下气象要素探测的可靠性与稳定性。
自动气象站安装于太阳能衬板的上中部,距静水面高度1.5 m。由于艇的随浪性好,测试表明在6级海况下,气象传感器受涌浪水浸的影响几率较小。自动气象站的采样时间间隔设为1 min一组,与北斗卫星的通信时间相适应。
一只海温传感器安装于无人艇浮筒的侧下方,静水中距水面高度0.25 m,用于探测并输出海水温度至艇载计算机。此外,在太阳能衬底板前部安装了两只小型硅基太阳总辐射表(EKO公司生产的ML-02),一只朝上测量向下的太阳辐射,另一只朝下测量海面的反射太阳辐射。所用水温传感器和辐射表的时间响应很快,但仍1 min取一组平均值,然后保存和发送。各要素的测量范围和精度满足气象和水文探测规范要求(表2)。
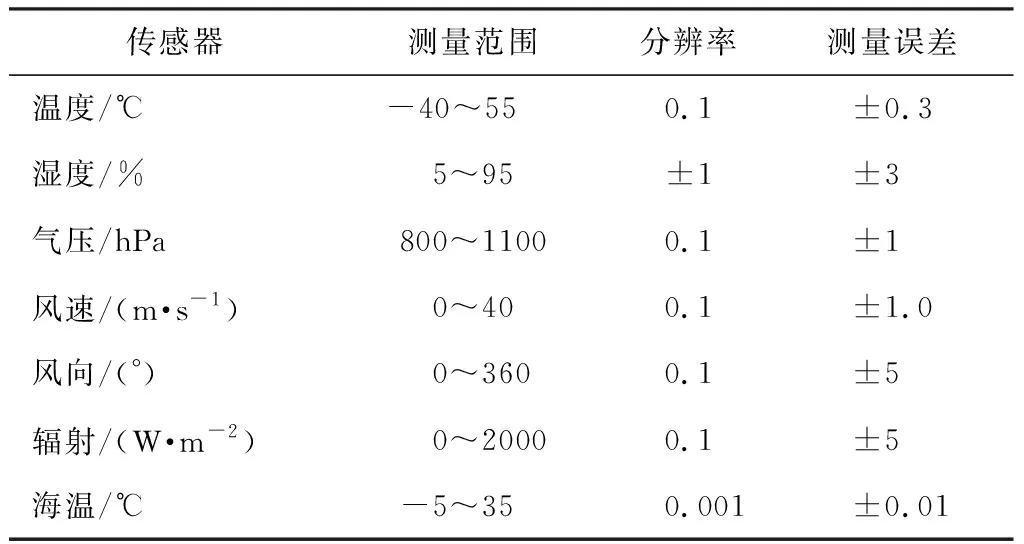
表2 艇载气象和水温传感器的主要性能参数
1.3 艇载通信与控制装置
海上自主航行探测与数据远程传输,需要通过卫星通讯实现。MWO-I采用我国北斗卫星的通信功能,虽然普通用户机每分钟仅传输70个字节数据,但其重量、功耗和价格等适用于本系统。为了满足多气象水文探测数据的实时传输、系统多种状态信息的传输与监控和陆基指令接收的需求,本系统安装使用了两套北斗用户机,一套收发多种运行指令和平台状态信息,一套发送气象水文探测数据。
控制装置是本系统的大脑,主要由艇载计算机和系列软件组成,与电源管理单元、自动驾驶仪、遥控接收机、电动推进装置、气象传感器I/O口和卫星通讯单元等连接(图3),主要功能是控制实现自动驾驶、自动探测和远程数据传输。图4显示平台运行的主要控制流程,艇载计算机中的广义状态信息包括:预设的航行模式、预设航迹、平台当前位置与姿态、当前工作状态(航速航向)与电量、实时气象信息以及附近船舶信息等。
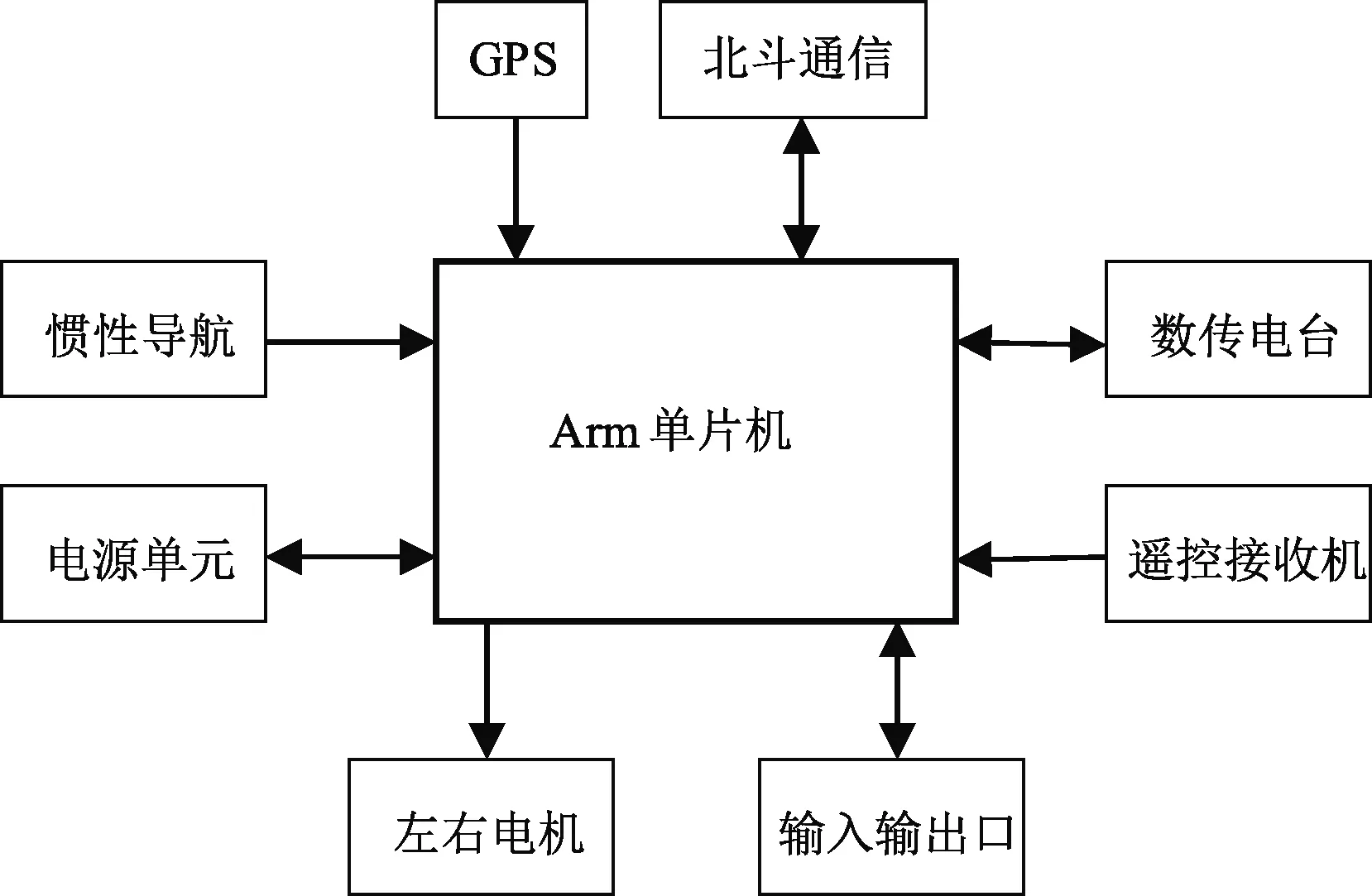
图3 MWO-I控制装置结构 (供电单元与其他单元的连线略)

图4 MWO-I平台运行主要控制流程
MWO-I上安装了北斗/GPS双模定位信息接收装置,实时定位信息传送至艇载计算机。根据预设航线(包括航速)和实时定位信息,艇载自动驾驶仪输出两个推进器的速度,改变航向由左右推进器的速度差实现。
控制装置与电源单元连接,一路接受供电,一路实现对其管理。白天太阳能板转化的电力一部分用于动力推进,一部分对蓄电池进行补充充电。在电池完全充满的情形下,全部太阳能电力用于动力推进,且在夜晚能保证无人艇低速航行和传感器与通信单元的连续正常工作;在充电不足(例如连阴雨天气)使得动力供电电压低于19 V时,无人艇进入无动力自由漂流状态, 此时剩余电量能够保证约7天平台状态信息和探测数据的采集与传输。当充电使动力供电电压高于19 V时,MWO-I自动进入预先设定的航行探测模式。
控制装置与气象水文传感器的数据传输单元连接,对每分钟一组数据保存并处理,然后发送至北斗通信单元。在探测数据和状态参数出现异常时,发送标识数字字符。陆基子系统接收并识别3组及以上异常数据时,显示出异常提示,即在监视屏幕上异常参数后面不再出现具体数值,而是为醒目的红点替代。气象水文数据的采集、变送、传输和监控技术的详细流程设计和实现,与陆基或岛基自动气象站的类似,这里不再详述。
1.4 海上观测模式
无人艇具有自动驾驶和远程更改航线的功能,可以根据科学研究与业务工作需求实现多种航行模式的观测,包括走航、漂流和准锚定观测模式。走航观测,就是按预设航线航行并进行探测和数据传输;漂流观测主要在夜晚进行,就是无人艇关闭推进动力,进行“随波逐流”状态下的探测和数据传输。
准锚定观测有两种方式(图5)。一种是在一给定经纬度的固定目标点(或称“锚点”)周围连续转圈,圆形和方形都可(图5a),半径或边长度小于300 m,在这一“锚点”提供时间连续的观测数据。另一是以“锚点”为圆心(图5b),设置一半径范围(例如500 m),当无人艇接近“锚点”时(例如设为30 m)自动关闭动力,进入漂流状态探测;当无人艇达到预设半径时自动启动动力,进行返回锚点的航行观测;这一模式可以简称为“漂离—动返”式观测。初步试验表明,在风速和流速不大的情况下,约1.5 h实现一次500 m半径的“漂离—动返”式观测。与连续转圈方式相比,此种方式的优点是可以节省部分能耗,尤其是在夜晚。下沉半潜漂离与动力回返的多次往返准锚点观测,有望测得表面海流,具体试验与初步结果分析由另文介绍。
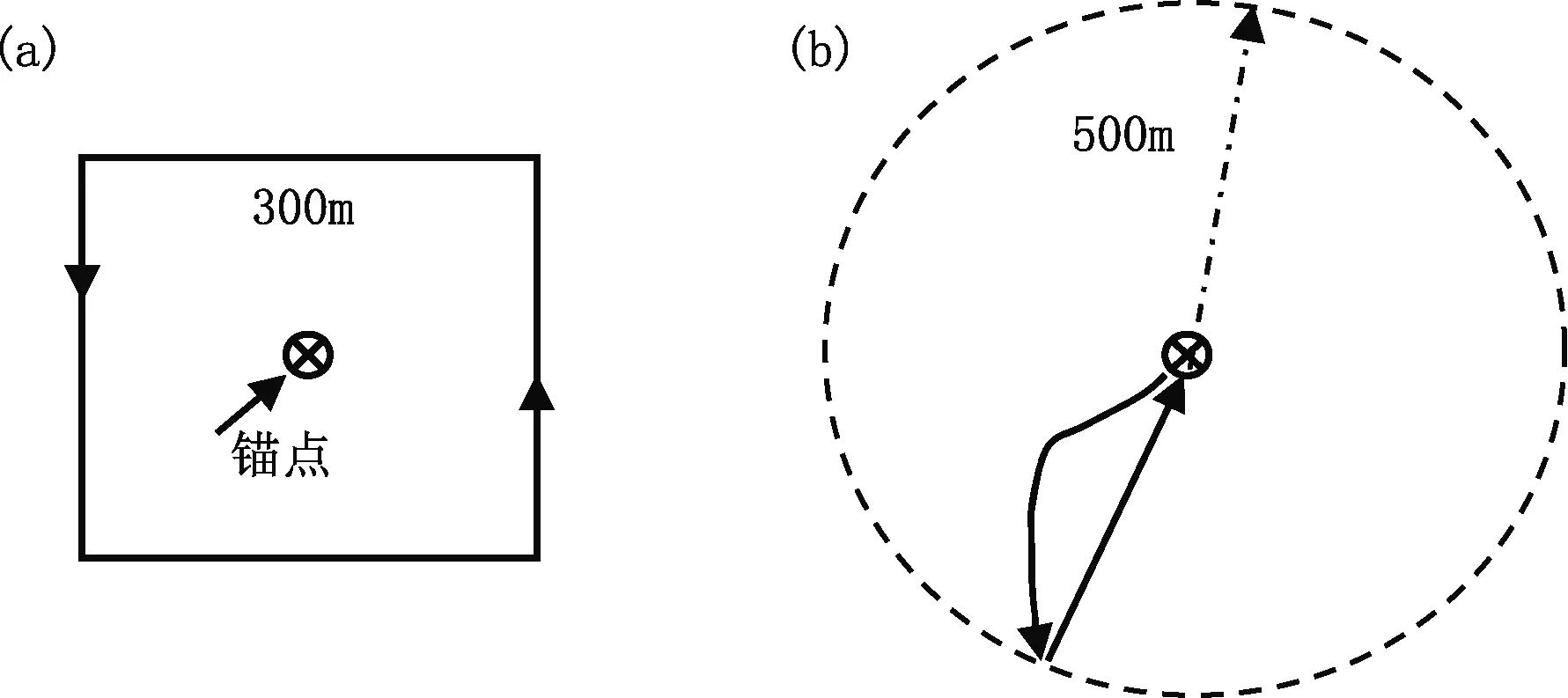
图5 “准锚定”观测模式示意:(a)连续转圈式, (b)“漂离—动返”式 (图a中实际航迹在转弯处有一定的向外弯曲,转弯半径约20 m; 图b中为了清晰显示,夸大了漂流轨迹的弯曲度)
1.5 陆基子系统
该子系统的主要功能是规划和发送更新的航迹与任务,接收海上无人艇系统的状态与探测数据,资料预处理与显示及分发和存储;主要组成是北斗用户机、两台计算机和系列应用软件。使用通用的远程控制与监控软件,在任何地点的入网计算机或智能手机上都可实现远程操作,包括MWO-I工作状态监视、数据信息浏览、航迹和任务更改与发送、数据下载等。
2 海上试验个例
自2015年系统研发成功后,在海上进行了多次试验。在海试前,每艘艇首先在“工厂”露天水池内进行约20 d的浸水试验,以检查其水密性和系统连续工作性能。考虑到海上试验的不确定性,我们遵循循序渐进的原则,即先短航时后长航时、先港内再港外、由近及远的进行,航时从2 h扩展到130 h以上,MWO-I的主要技术设计指标都得到了验证。
作为一个个例,本节介绍2018年3月30日至4月6日的初步试验结果。此次试验目的是进行较长航时多技术性能的全面测试,气象探测结果尽可能地与海上浮标站的观测进行比较,因为锚定浮标是当前开阔洋面上能够进行连续和实时气象与水文观测的主要平台,其提供的资料已有多种应用,包括海上台风特征的分析研究[18]。本次试验抵近的两个海上目标浮标分别是厦门浮标(区站号59334,本文标记为XM)和海峡南浮标(区站号59544),分别位于(23°38′02″N,118°11′53″E)和(22°36′01″N,119°00′02″E)。试验以福建省东山县澳角村渔港东侧为出发点。3月30—31日,MWO-I在近岸处航行测试,结果表明各子系统全部正常运行。4月1日上午约10:00,为了避开近岸海洋养殖网箱,租用一小渔船将MWO-I拖出离岸50 km处释放,然后按预设航线自动驾驶航行。
图6显示4月1—6日MWO-I的航行轨迹,总航时达128 h,累计航程约为474 km。由图6可见,在白天MWO-I按预设航线航行,经计算实际航行轨迹与预设路线的平均距离差小于10 m。为了考查其漂浮探测状态和能力,设计进行了在傍晚至次日早晨无动力的漂流探测试验,即在太阳能充电不能使动力供电电池电压维持在19 V以上时,MWO-I自动停止动力航行,处于漂浮探测状态;第2天早晨太阳能充电提供足够电量时,MWO-I自动恢复动力航行,首先向预设航线最近航点航行,然后沿预设航线前进,这样在图6中看到5个夜晚不规则圆弧形航迹。
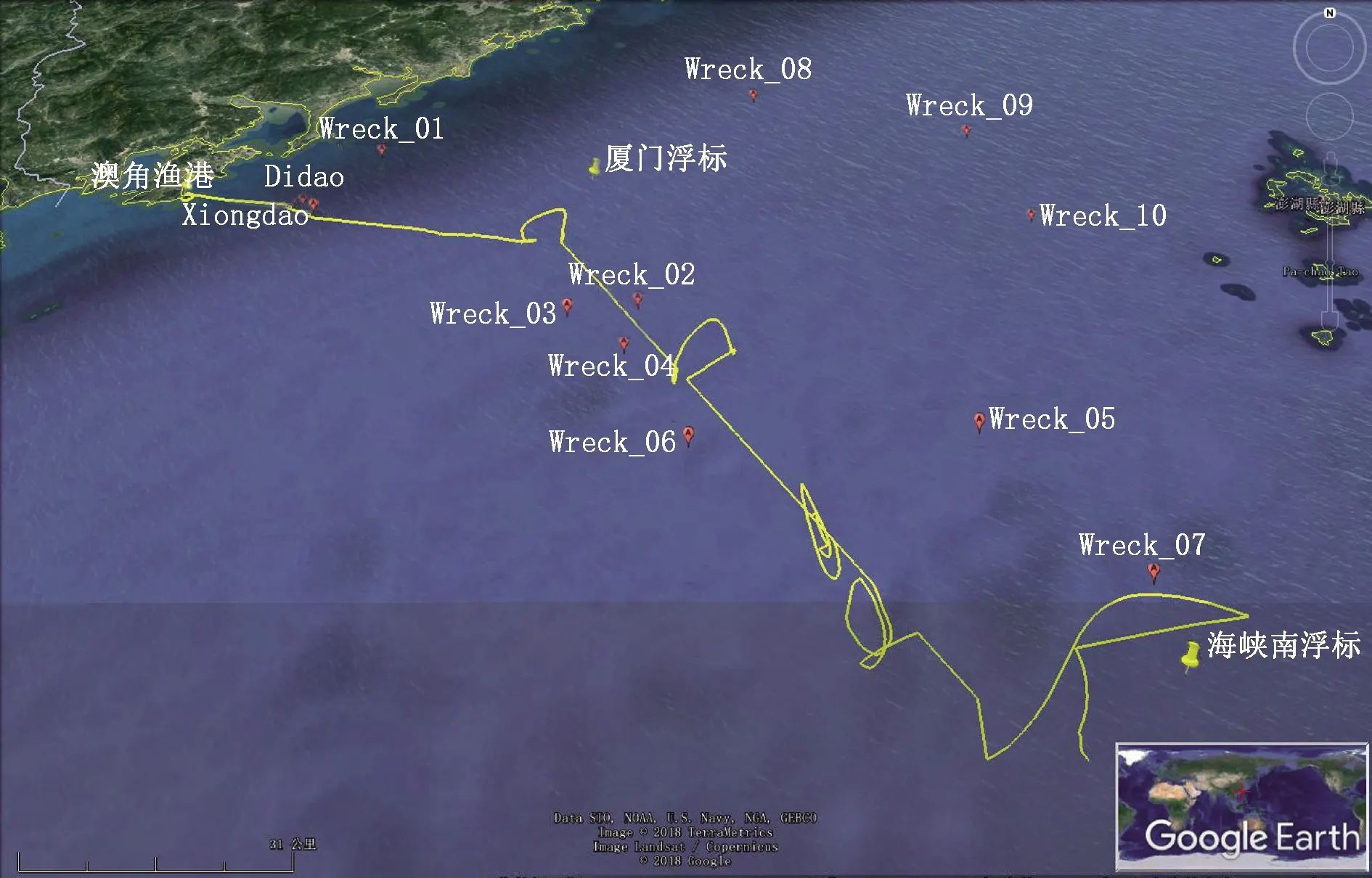
图6 2018年4月1—6日MWO-I航行轨迹 (直线为有动力航行,曲线为漂流;黄色图钉为两个浮标的位置)
图7显示6天连续的原始气象和水文探测数据时间序列,每个小图给出一个要素,MWO-I的是黑色线;为了直观比较,同时显示XM浮标的小时平均值,由蓝色曲线表示。由图首先可见,MWO-I每分钟获得的气温、相对湿度、气压、风速风向和水温数据是连续的,没有出现异常值,这次试验数据获取率为100%。这表明,在这几天的天气和海况情况下,气象水文传感器和通信收发装置不仅工作正常,而且气象传感器的探测没有受到海浪的影响。
由图7中无人艇与XM浮标的距离可见,在4月1日午夜两者之间的距离最近,最小距离约10 km。再看图7中前3天大部分要素的日变化特征,无人艇与浮标测得的基本一致(风向除外);随着距离(时间)的增加,无人艇与浮标观测的变化特征的一致性变差。MWO-I所测要素值的变化幅度一般大于浮标的,这主要因为前者是分钟级数据,后者是小时平均数据。在风速的时间序列上可见,6日晚无人艇与浮标都观测到大风,MWO-I测得的最大值为18.9 m/s。关于海面水温SST的测量,值得注意是,MWO-I的不仅日变化幅度大,而且在午后有明显偏大的数据(>25 ℃),其原因有待进一步分析。

图7 2018年4月1—6日MWO-I测得的原始数据(黑色线)及厦门浮标(XM)小时平均数据(蓝色线):(a)MWO-I与XM浮标的直线距离D,(b)海面气温T,(c)相对湿度RH,(d)海面水温SST,(e)气压P,(f)风 向WD,(g)风速WS)
为了进一步比较分析MWO-I与XM浮标的观测,按几个距离档绘出对比散点图(图8),虽然小时平均数据量较少,但仍分别计算其相关系数。由图可见,总体上两者距离较近时一致性更好,其中气压的相关性最好,这是自然合理的;风速和风向的一致性在时间序列上(图7)看不清楚,但在散点对比图中看得比较清楚;SST在有些时段一致性差,原因在前面已提及。无人船与厦门浮标距离在20 km以内,其观测的温度、相对湿度、气压、风向、风速和海温的标准差分别是:1.68 ℃、14.9%、0.99 hPa、44.85°、0.70 m/s和0.76 ℃。
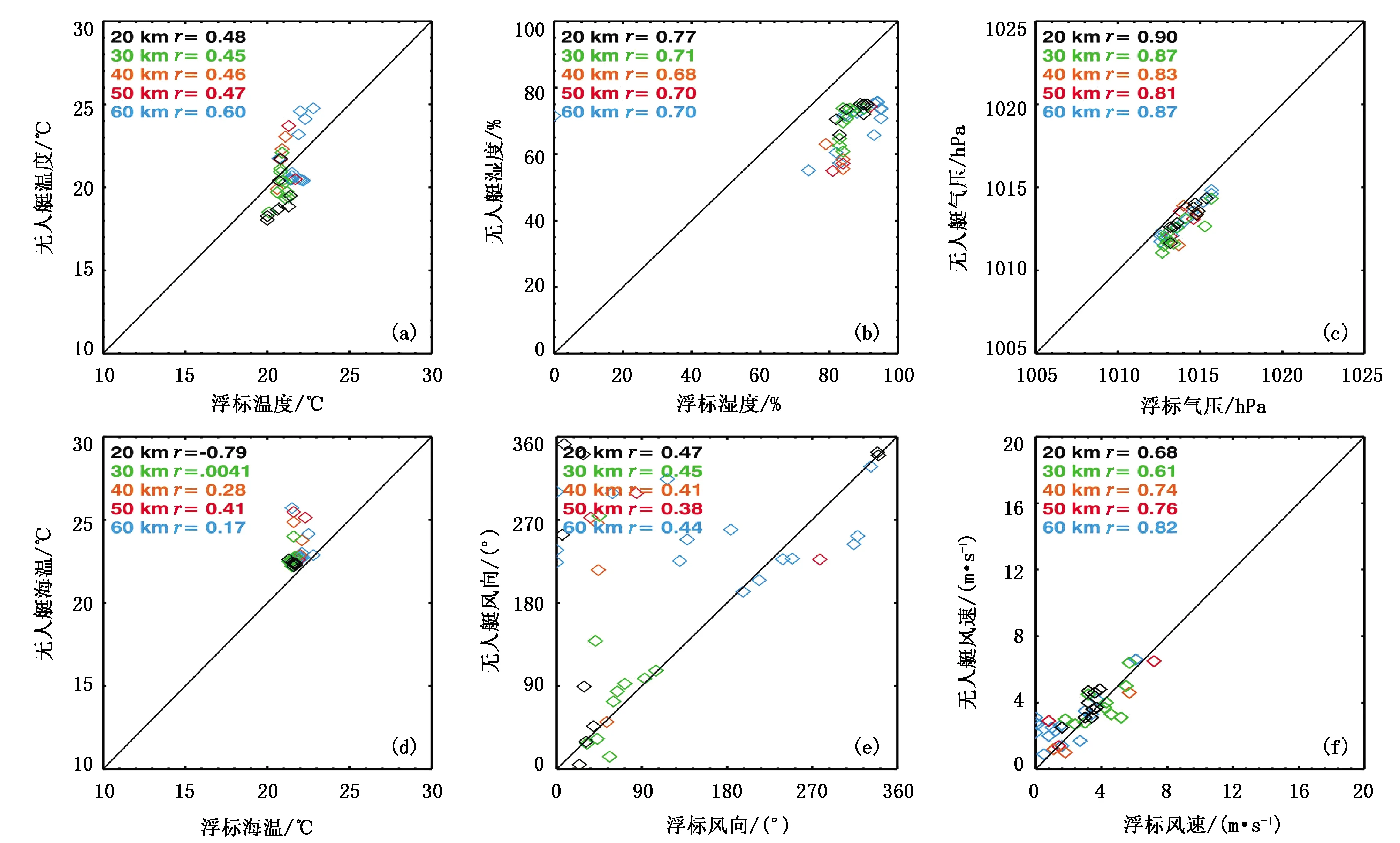
图8 无人艇MWO-I与厦门浮标观测的散点图 (不同颜色代表几个距离范围的测值,例如:绿色表示30~40 km距离范围内时间对应的观测值)
对MWO-I与海峡南浮标的观测数据也进行了对比分析(后者风速和风向缺测),总体上结果与上述相同,这里不再赘述。这次试验主要是考察MWO-I跨昼夜长航时的探测能力,没有专门设计和实施在浮标附近的“定点”观测,所以可比较的数据量还不够多。此外,试验中获得了比较连续的海面向下和向上的太阳总辐射数据,虽然可看出云层的影响,但数据姿态订正问题还没有解决,故此处不做进一步分析研究。
3 结论和讨论
针对海上气象水文原位探测技术不足和资料稀少的问题,我们研发了一种基于太阳能无人艇的新型海上气象探测系统MWO-I,经过3年多近10次的海上测试,得到的结论如下:
(1)各项性能指标基本达到了设计指标,实现了基于卫星导航的自动驾驶、自动部署、自动探测、自动数传等功能。
(2)依靠北斗通信,能够每分钟实时地发送提供一组海面气温、气压、湿度、风速风向、太阳总辐射和海面水温资料;无人艇平台还有约10 kg载荷余量,可以加装其他小型传感器,例如:波浪仪和能见度仪等设备。
(3)实现了海上航程大于450 km的探测试验,艇载自动气象站的观测与厦门和海峡南两只锚定浮标的比较一致。
该系统大于6个月超长航时的工作能力和抗恶劣海况的能力,有待在今后海试中得到证明;需要与锚定浮标和科考船等的气象水文要素观测进行更为长期和系统的对比分析。下一步将结合业务和科研需求,在不同季节开展长航时探测试验,获取更多的观测数据,进行数据质量控制规范化的分析研究。此外,将考虑在MWO-I上加装其他传感器(例如波浪仪)和自动船舶识别系统(AIS),增加其探测与生存能力。
随着卫星导航、卫星通讯、自动驾驶和传感器等技术的进步,采用无人机和无人船平台构建新型高智能化的海上气象水文观测系统已成为可能,多无人船海上组网观测将提供大量海上原位探测数据,必将增强包括台风在内的海上强烈天气的监测能力,提高海洋气象和海-气相互作用等的研究水平,并应用于数值天气和海洋环境预报及卫星遥感产品验证业务之中。
致谢:在多次海上试验过程中,项目组得到了福建省厦门市气象局、漳州市气象局和广东省茂名市博贺海洋气象科学实验基地的大力协助;河北淳博航空科技有限公司安装和调试系统;上海气象仪器厂协助进行水池试验。在此一并致谢。
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
疯狂英语·新读写(2021年6期)2021-08-05
舰船电子工程(2021年5期)2021-06-04
军民两用技术与产品(2021年2期)2021-04-13
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
垂钓(2019年2期)2019-09-10
小哥白尼·趣味科学画报(2019年12期)2019-02-28
创新作文(1-2年级)(2017年7期)2017-12-26