新工科背景下“智能汽车技术”课程改革与实践
2021-08-24 08:57:50李煊鹏秦文虎
电气电子教学学报 2021年4期
李煊鹏, 王 东, 秦文虎
(东南大学 仪器科学与工程学院,江苏 南京210096)
0 引言
近年来,在人工智能和大数据的快速发展推动下,各行业都面临着重大的变革。汽车行业加快了从传统汽车生产制造向新能源智能网联汽车研发制造的转型步伐,并与互联网行业相结合,共同推动无人驾驶技术的发展。但是,新技术的发展面临着人才短缺的问题,制约了其快速发展、产品成熟以及商业应用落地。其原因在于:一方面,智能汽车技术是一门综合性的工程应用技术,涉及计算机、车辆工程、信息技术等多个学科的交叉融合,对行业从事人员的综合能力要求高,特别是高端人才需求量大;另一方面,虽然我国高等教育已开始了人工智能学科方向的拓展延伸,比如建立人工智能学院、开设人工智能相关课程等,但总体上仍处于起步阶段,无法形成规模性领域人才输出。
为了应对产业和技术变革、社会需求多样化、人才需求短缺等全球高等教育新时期的新挑战,我国率先提出了“新工科”概念,强调以多样性、包容性、规范性为支撑的三维度结构,注重前沿引领与学科交叉、校企合作与科教融合。在新工科的背景下,于本科教学阶段引入“智能汽车技术”相关课程,符合新时代工科教育教学的战略需求,不少学校和机构都开设了线上、线下,且形式内容各异的相关课程[1]。
江苏大学汽车与交通工程学院是国内较早开设“智能汽车技术”课程的院校之一,主要在理论教学的基础上,提出了分组组建车队对智能汽车进行设计、改装、试验,以及安排企业实习的方式进行实践教学[2]。北京理工大学车辆工程专业的智能汽车工程模块涵盖了无人驾驶汽车、车联网技术、智能悬架、主动转向等新技术领域,配合其出版的系列教材进行讲授[3]。东南大学仪器科学工程学院结合学院特点,面向智能感知和导航定位方向需求,开设“智能汽车技术”本科生课程。该课程侧重于车辆在复杂环境中的感知定位,同时辅以规划控制方面的内容讲授,构建整套智能汽车技术的课程内容[4]。
而线上课程,如国内深蓝学院的“无人驾驶技术”课程是以专题形式邀请行业内部专家进行讲授;众多机构开设了关于智能汽车概要性的在线课程资源,如汽车学堂的“智能网联汽车概论”、网易云课堂的“未来汽车大讲堂”等。其优点在于能够帮助学生拓展视野,了解行业内部进展,但是这一类在线课程存在各个模块之间的衔接不明确,没有完整的课程体系,缺少互动交流的平台等问题。国外在线课程网站Coursera上线了由加拿大多伦多大学制作的“自动驾驶”课程,这是国内外第一个系统的智能汽车相关技术课程,包括概要、感知、规划、状态估计等方面的内容。在线课程网站Udacity上发布了联合百度公司的基于Apollo体系的自动驾驶课程,以及由奔驰、滴滴等公司联合开设的“成为无人驾驶车辆工程师”系列课程。上述课程是较早系统性呈现智能汽车技术的相关课程,但是存在部分知识点未能明确、课程内容无法定位本科教学、收费昂贵等问题。
总体上讲,由于平台资源不同,很多高校无法开展基于实车实践的智能汽车技术课程,而智能汽车技术综合性强、偏前沿,致使采用纯理论教学容易导致授课质量不高;并且该课程内容涉及知识点多且分散,有限的课堂时间里无法有效覆盖多个模块内容。针对线上线下课程教学中存在的问题,如何利用好在线平台进行混合式课程教学成为了目前相关课程教学的开展方向。
1 课程现状
目前,“智能汽车技术”逐渐成为“新工科”背景下具有代表性的跨专业课程,其难点包括以下四个方面:
1)受课程资源平台限制,导致重理论少实践
国内智能汽车技术发展迅速,尤其以工业界为代表,但是学术科研界往往因为缺少足够的人力、物力、财力的支持,大部分院校无法开展具体的实车实验,即使少数科研单位具备研发自动驾驶的平台支持,也无法真正面向教学开展广泛的实车实验。导致目前该课程的教学过程更多局限在理论讲授。
2)知识点繁杂且更新快,有限课时下的教学困境
“智能汽车技术”是在人工智能浪潮下面向产业变革而开设的紧跟研究前沿的工科课程。如果不讲授车联网相关内容,也应包括感知、规划、控制等主要模块,涉及传感器、机器视觉、雷达信号处理、决策规划、自动控制、数据融合等多个学科知识。此外,由于相关技术还处于研发阶段,特别是面向全自动驾驶目前尚没有成熟的技术方案,智能汽车技术的理论研究处于不断更新的状态。这两方面原因导致在有限课时下系统性讲授该课程的困难。
3)如何深入课程理论,避免浮于表面
相对于知识点繁杂且更新快这一般性难题,如何深入课程,系统性地探索自动驾驶中尚存问题的解决方法则是对于一些有着更高需求的学生所面临的问题。考虑到不同学生能力、背景之间差异,设计并采用不同教学方法,使之学有所获而不是浅尝辄止,更能够使学生在形成智能汽车技术框架的认识基础上,培养学生对相关领域的探索热情和专业能力。
4)如何平衡教学过程中的多样性、包容性与规范性
多样性、包容性、规范性是支撑新工科教育创新发展的三个要素,彼此相互促进又相互制约。由于智能汽车技术尚处于发展阶段,工业界往往采用不同的技术方案,呈现出多样性特征。在教学过程中,一方面,调研不同的技术方案、研究其背后的创新性,有利于工程教育创新和人才培养。而另一方面,多样性需要包容性与规范性作为其发展的基础,即方法的设计需要严格遵循一定的标准、规范、原则,在此基础上鼓励提出新的设计方法,创造包容性好的教学环境。如何平衡这三者之间的关系,形成良性的教学效果是该课程的又一难点。
2 教学改革具体方法
针对上述问题,我们将智能汽车技术一课定位为研究性课程,并提出以下四点具体改革方法:
1)利用仿真平台,重在基于理论的实践
由于大多数教学团队无法提供实车平台应用于智能汽车技术的教学中, 依托于仿真平台的使用则更贴合现实条件和教学需求。课程团队可利用Carla、Airsim、Apollo等仿真平台,预先设计搭建道路环境,进而实现算法设计和验证。不仅省去了硬件配置调试过程,将重点放在核心模块和算法的理解与实践中,也能锻炼学生动手能力、提升学习兴趣。通过布置相关编程作业,进一步检验课程学习效果。
2)模块化教学,采用总分的思路,重在讲授感知、规划、控制等部分的基础内容
合理安排教学内容是保证教学质量的关键。针对智能汽车技术知识点多、交叉学科融合性强的特点,采用模块化教学方式,以驾驶任务为导向的前提下,讲授感知、规划、控制等模块的基础核心知识点和难点。结合本专业特点,偏重感知部分的原理和算法,再配合规划、控制相关理论,形成完整的智能汽车技术授课体系。
3)采用线上线下的混合式教学,利用课前学习、课中研讨、课后作业的模式强化教学效果、拓宽教学广度和深度
考虑到学生知识结构、学习能力的差异性,单纯课堂教学无法深入相关知识点,为了能够更好调动学生积极性和课堂参与度,我们采用混合式教学方式,利用课前线上学习、课中研讨、课后作业的模式强化教学效果。要求学生课前完成在线课程的学习,包括视频观看、完成客观测验、对学习过程中的难点进行讨论,以及阅读相关文献构建研究基础。课中由教师进行本节课程的重点难点回顾,引导学生对相关技术进行创新性思考。在这一环节可采用翻转课堂模式,注重课堂讨论以及总结补充。在课后环节中,通过编程作业来提升学习效果,将研讨内容进一步在实践中加以强化。依靠课前、课中、课后三个环节的整合,提升教学广度和深度。
4)采用分队PK模式,强调系统完整性和逻辑性
为了平衡教学过程中的多样性、包容性与规范性,就要求在研究规范性的前提保证下激励学生自主探索不同的技术方案。这就需要通过分组的方式实现,而由于“智能汽车技术”一般包括感知、规划、控制等模块,要求单个小组在有限的教学周期内完成所有内容的深入探索明显不符合实际。因而,采用分组基础上的分队PK方案,即每个小组只负责某个模块,同时若干个小组组成一队,队与队之间的较量转变为各小组研究内容的汇报和挑战提问。同时,在探索不同技术方案的过程中,要求保证各队整体技术方案的完整性和逻辑性。
3 教学改革的实施过程
在教学实践中,我们将教学过程划分为两阶段:第一阶段为侧重于个人学习的常规课程阶段,包括课前在线课程学习、课中重点难点梳理以及问题讨论、课后编程作业;第二阶段进行以小组为单位的专项研讨,包括课前开展小组研究讨论、课中小组汇报和提问挑战、课后报告整理。最终的考核则包括在线课程的测验与作业、编程作业、小组汇报、课程报告,各项得分总和作为最终成绩。
在第一阶段中,课前学习依托于课程团队在中国大学MOOC平台发布的在线视频。目前,该在线课程包括九章内容,如表1所示:
该部分内容要求学生在每次上课之前完成内容的学习,包括视频观看、完成客观测验。在线作业主要是一些重点难点内容的讨论,教师汇总学生完成情况,准备课中讨论。为了更好的完成重点难点的讨论,通常要求学生完成参考文献的阅读,教师需提前将相关参考资料在MOOC平台发布,供学生参考。
正式上课开始,教师进行本节课程的重点难点回顾,一般花费约15分钟的时间。接下来,通过学生在课前完成的讨论作业,进一步引导学生对相关技术进行思考。如有必要时,提前通知学生准备
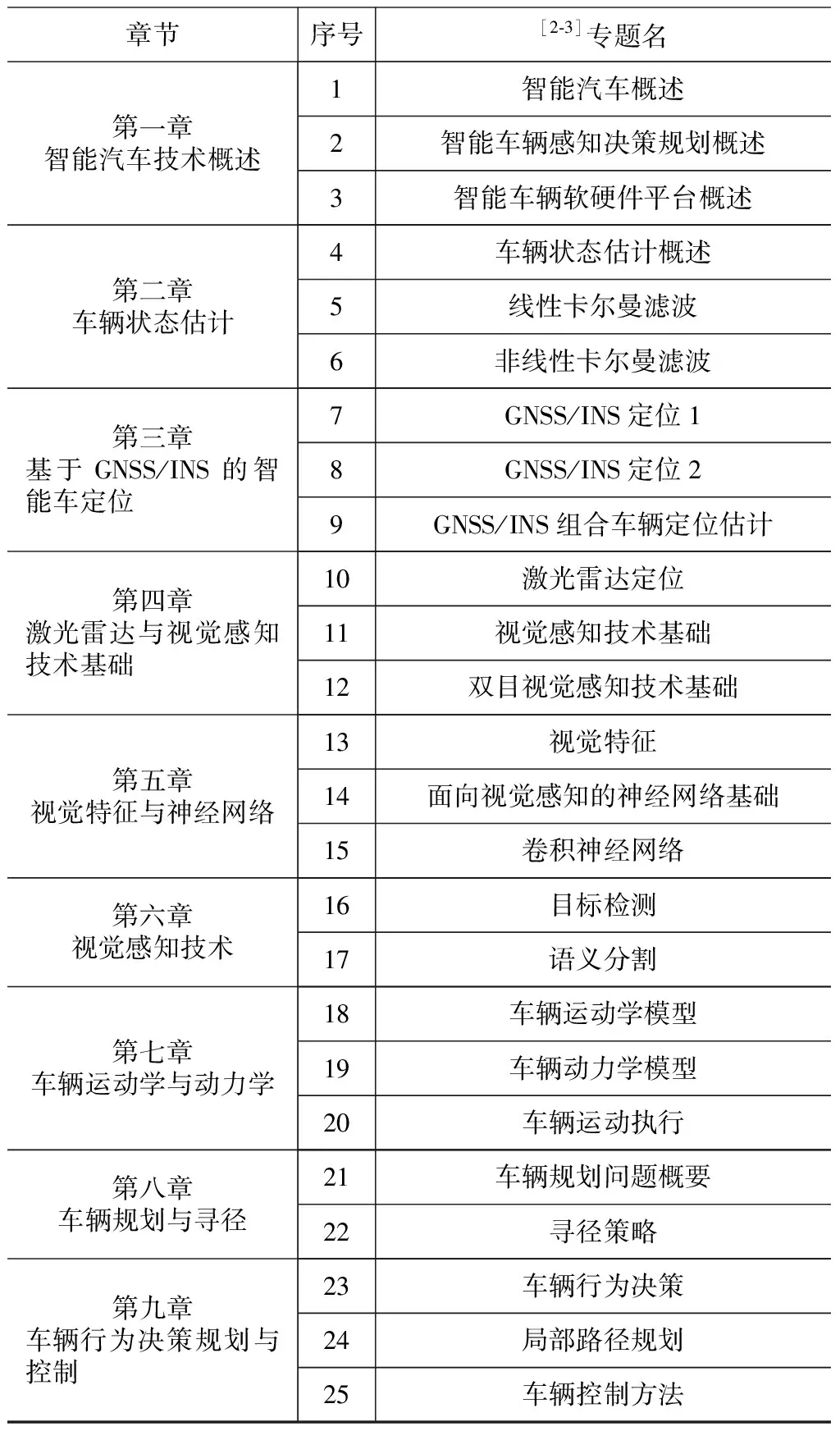
表1 “智能汽车技术”在线教学内容
PPT,在课堂上进行PPT汇报,更有针对性的展开讨论。最后,教师对课堂讨论的问题进行总结补充, 总结的内容一般会和课后环节的作业相关。
在课后环节中,学生需要完成编程作业来进一步提升学习质量。编程作业内容是以教学内容为基础,再增加部分拓展题目,构建一套完整功能,比如,实现道路标志标线检测、车辆位姿估计等。编程作业可以依赖于仿真平台提供的数据来实现,也可以将学术研究的数据提供给学生来完成。作业总量需要考虑学生实际情况,一般控制在3-4周时间完成提交。
第二阶段重点则放在以小组为单位开展翻转课堂的专项研讨,采用组队PK的方式进行。由若干小组组合成一队,每队选出队长一名,负责统筹安排。各队可以从实际智能汽车设计角度出发,选择Tesla模式、Waymo模式、Apollo模式等具有代表性的技术方案进行研讨。队中各小组负责不同的模块分析调研,从感知、预测、定位、规划、控制不同层面对无人车设计进行论述。重点是各模块之间的衔接要明确,比如感知模块输出哪些信息给预测模块,控制模块需要哪些参量等。在此阶段,由各队队长负责协调,并且与教师保持密切沟通。
课中小组汇报则安排为每小组15分钟左右时间,就重点核心内容进行讲述。一般以各队队长报告作为开始,进行总体性介绍。接下来每轮PK,每队均按照相同内容的研讨小组进行汇报。剩余时间则安排挑战提问以及教师点评。
课后报告整理则由各小组编写独立报告,报告中除了呈现汇报阶段所述内容以外,还需根据挑战提问和教师点评所提问题进行回答。评分则根据所述内容的逻辑性和完整性,以及基于所提问题进行的调研和回答。
4 结语
本文介绍的“智能汽车技术”研究型课程的教学改革与实践,利用线上线下混合式教学方法,依托在线课程进行课前准备、以研讨为主、授课为辅的课中环节、以及课后深化实践构建一整套教学体系。该模式可以保证学生课后学习的持续性,并且通过研讨和作业检验线上学习质量。由于研讨贯穿整个教学过程,可达到过程性考核的目的。该项教学改革实践不仅加强学生资料检索能力、文献阅读能力和编程能力,更可以提升学生对本专业内容兴趣度、培养科研习惯、增强其创新意识,切合新工科背景下的课程改革方向。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:30
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01 06:27:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
儿童时代·快乐苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年级(2016年4期)2016-04-18 00:24:37
文理导航·教育研究与实践(2015年12期)2015-12-04 00:49:23
决策探索(2014年21期)2014-11-25 12:29:50