
机器人上下料系统仿真设计*
2021-08-23 09:48王卫华曾俊皓黄静怡
机械制造 2021年7期
□ 王卫华 □ 李 林 □ 曾俊皓 □ 黄静怡 □ 雷 鸣
1.广东白云学院 机电工程学院 广州 510450 2.苏州大学文正学院 江苏苏州 215104
1 设计背景
工业机器人代替人工的生产方式是目前智能制造行业发展的主要趋势,可以实现高效、稳定、精确生产,自动化程度高,具有很强的适应性[1-6]。由此可见,对工业机器人系统进行研究极其重要。
目前,对机器人上下料系统仿真设计的研究较为有限。李玉爽等[7]对机器人与数控机床上下料系统进行了仿真,以验证机器人选型的合理性。高茂源等[8]对上下料机器人的性能参数进行实时调整,获得了最优的机器人作业性能参数与生产节拍。陆晨芳等[9]设计了一套自动上下料工作站,实现了生产过程的自动化与无人化。
笔者以水龙头上下料生产线为研究对象,利用IRB 120六自由度关节型机器人在流水线上对水龙头进行上下料操作,对机器人上下料系统进行仿真设计。在设计中,应用SolidWorks软件构建机器人上下料系统各部件的三维模型,导入RobotStudio软件对空间布局进行规划,以构建双工位生产线,并进行仿真。
2 系统总体布局
机器人上下料系统由工业机器人、输送装置、可编程序控制器和其它外围设备组成。系统以可编程序控制器为控制核心,对外围设备与工作机器人等装置进行连接与管理,实现工业机器人与其它设备的配合工作。在机器人上下料系统中,选用IRB120机器人,具有紧凑、敏捷、轻量化等特点,可快速拾取、组装零件。应用SolidWorks软件和RobotStudio软件构建的机器人上下料系统布局如图 1所示。
3 系统工作流程
系统的工作流程如下:输送线1、2分别将底座和手柄两个零件输送至输送线末端,工业机器人移动到上料位置处夹持底座,再移动到组装台上方,将底座放入固定支架;根据所设置的节拍,工业机器人再次移动到上料位置,夹持手柄,移动到组装台上方,完成两个零件的装配;将装配完成的水龙头成品下料、拾取,并存放在仓库中;输送线1、2末端安装有传感器,当检测到零件离开后,自动上料,进行下一次组装。机器人上下料流程如图2所示。
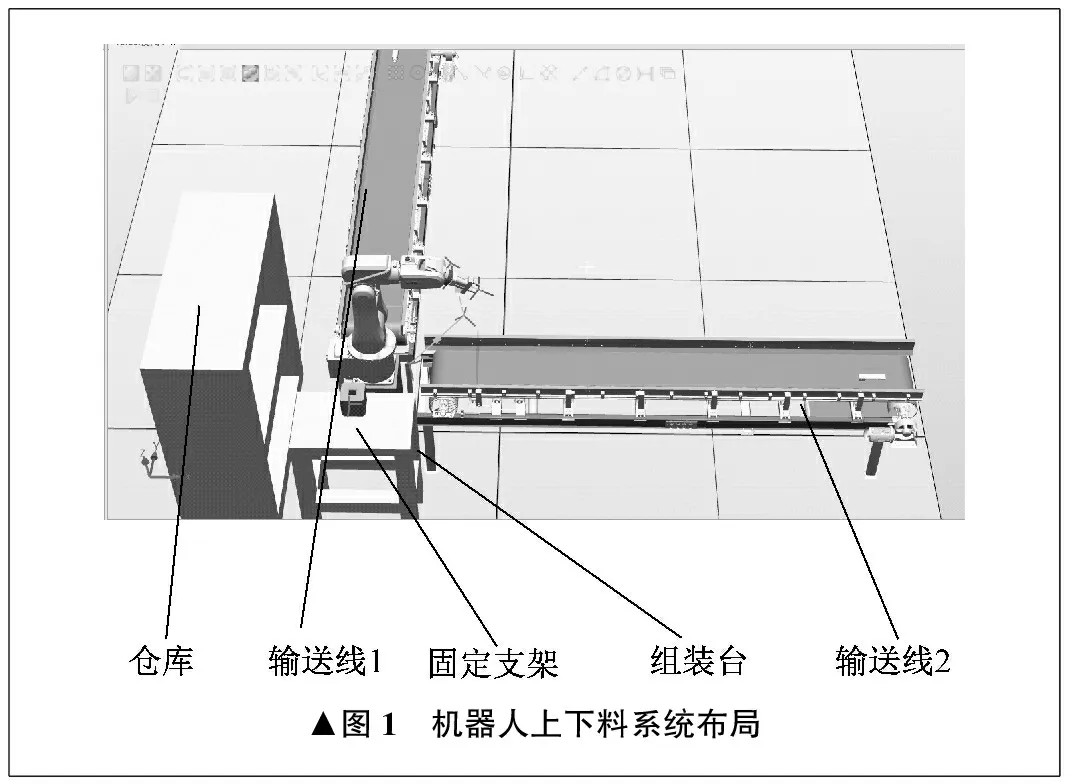
▲图1 机器人上下料系统布局

▲图2 机器人上下料流程
4 仿真总体设计
通过RobotStudio软件搭建一个虚拟机器人工作平台,利用虚拟机器人模拟操作,编制离线程序,可以有效实现自动化和智能化操作,大大提高工作效率。
利用SolidWork软件构建机器人上下料系统各部件的三维模型,导出为SAT格式,并导入RobotStudio软件,利用RobotStudio软件对系统空间布局进行规划,创建IRB 120六自由度关节型机器人模型,构建双工位生产线布局。设置仿真运行输入、输出信号和动态组件,编制离线程序,进行仿真。
机器人上下料系统仿真模型如图3所示。
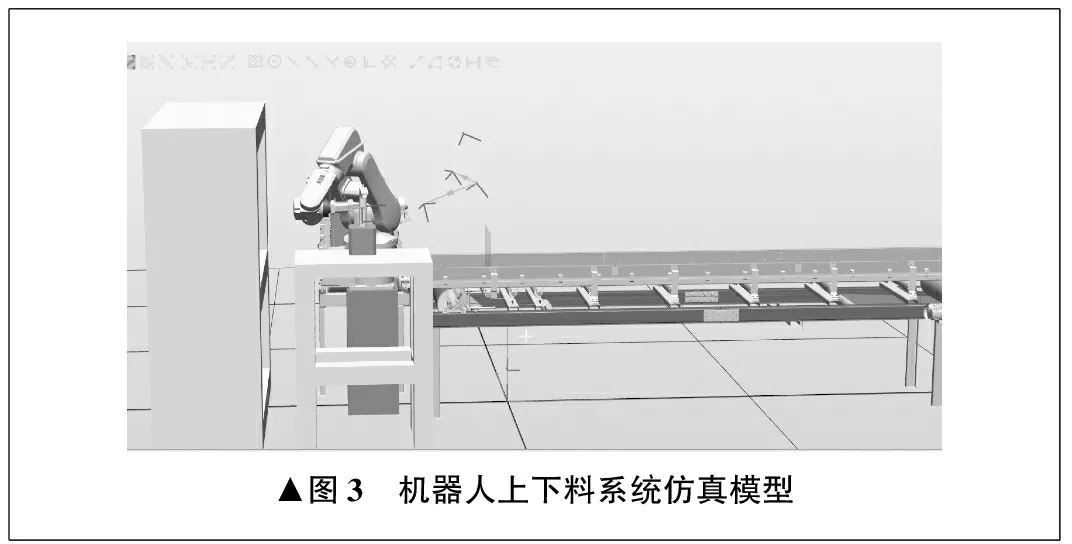
▲图3 机器人上下料系统仿真模型
5 输入、输出信号
仿真应用中,标准输入、输出板所提供的常用信号有数字输入信号、数字输出信号、模拟输入信号、模拟输出信号、输送线跟踪信号[10]。通常输入、输出板是挂在现场总线网络上的设备,将工业机器人的输入、输出信号与动态组件的输入、输出信号相关联,即工业机器人端的输出信号作为动态组件的输入信号,动态组件的输出信号作为工业机器人端的输入信号。动态组件可以看作一个与工业机器人进行输入、输出通信的模拟可编程序控制器,通过离线编写上下料系统程序,实现上下料系统的整体仿真。笔者配置通信板卡,设定地址为10。机器人上下料系统的输入、输出信号分配见表1。
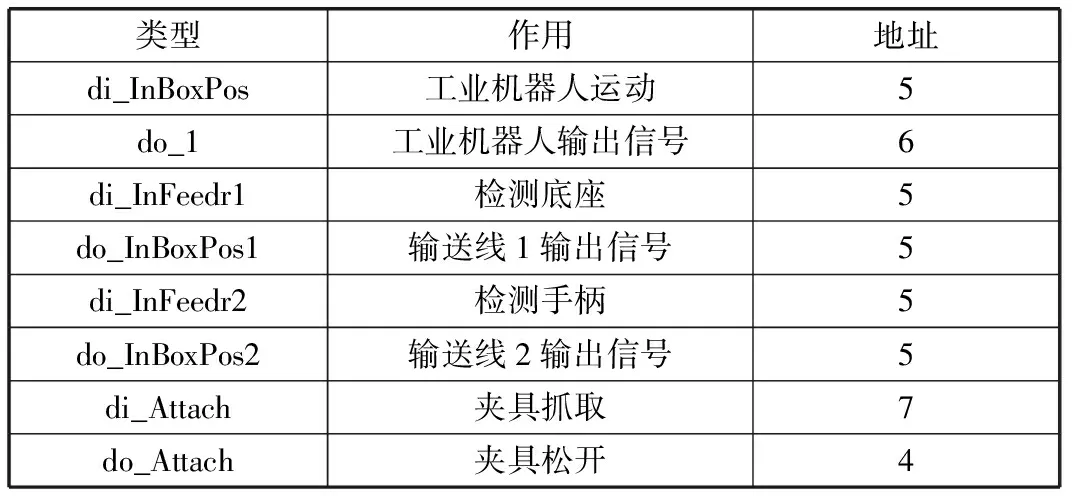
表1 机器人上下料系统输入、输出信号分配
6 动态组件
在RobotStudio软件中,创建机器人上下料系统的仿真模型,机器人手爪、上料机构、输送装置、下料机构等部件的动态效果均影响整个系统。软件中的动态组件能够实现动画效果。
将机器人手爪作为一个机械装置,创建动态组件。首先,添加动态子组件,一般包括PoseMover、Attacher、Detacher、LineSensor等。然后,设定各子组件的属性连接,即A组件的动作会引起B组件的变化。最后,创建动态组件所需的输入、输出信号,输入启动信号为diStart,延迟信号为diDelay,用于与各动态子组件进行信号交互。动态组件如图 4所示。动态组件的动态仿真模拟了真实的工业机器人为机器人上下料系统工作的过程。
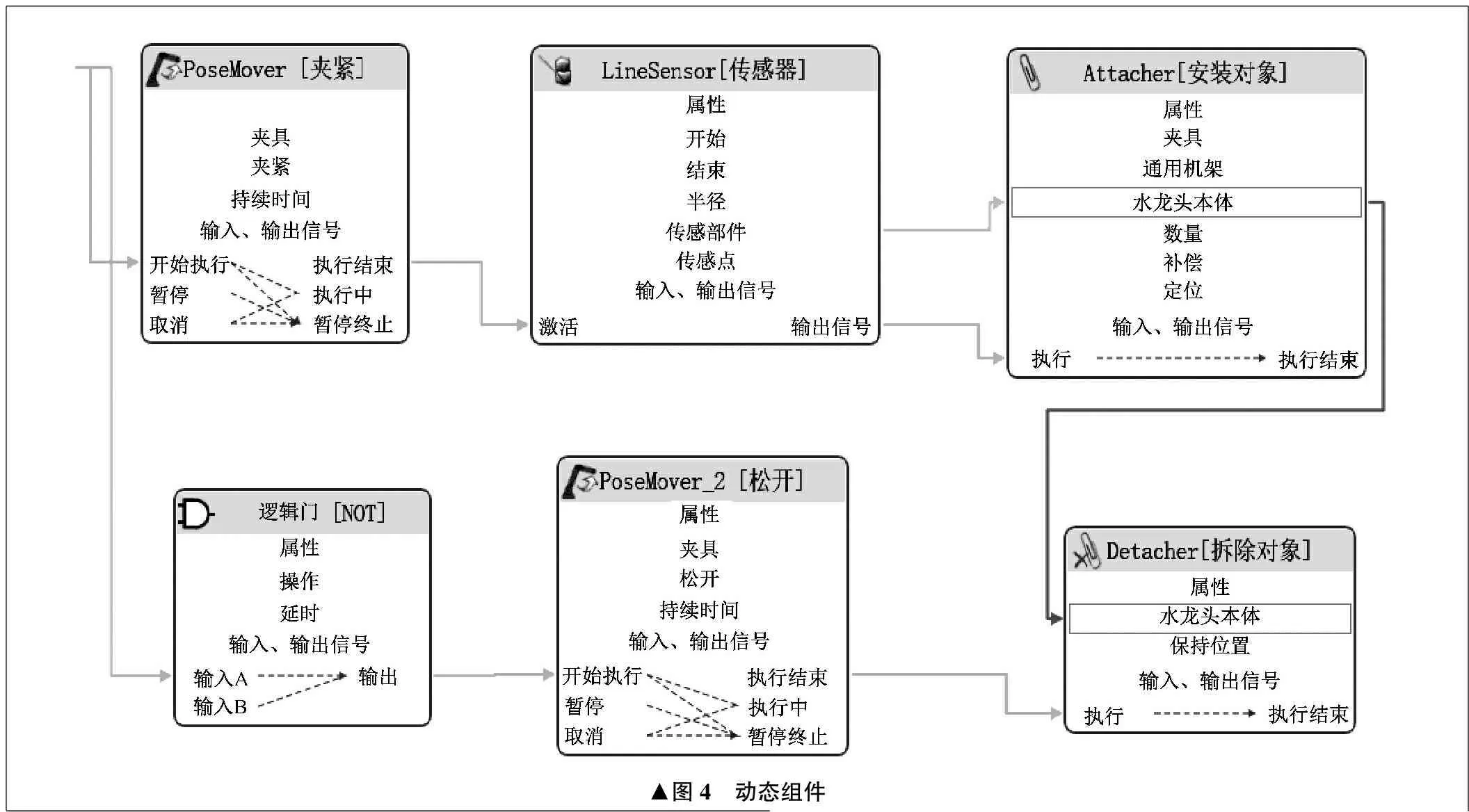
▲图4 动态组件
7 系统程序
根据所创建的机器人上下料系统仿真模型,利用RobotStudio软件进行离线编程。根据机器人上下料系统工作流程、输入和输出信号、动态组件,离线编程并示教目标点。程序中,需设定三个关键点:起始点、水龙头拾取点、放置基准点。拾取点可由固定的传感器进行检测,放置点与设置的坐标系和位置计算有关。
在系统中,需要示教的点共有18个,包括6个安全位置点、3个零件关键点、9个中间过渡点,以满足工业机器人姿态动作要求。
根据任务要求,按照机器人上下料系统的装配过程,编制离线程序。机器人上下料系统部分程序如图 5所示。
8 结束语
笔者主要以机器人上下料系统为研究对象,创建机器人上下料系统仿真模型,通过对仿真模型进行轨迹规划,实现水龙头的装配。
RobotStudio软件仿真结果表明,系统可以实现水龙头组件的无人装配作业,利用工业机器人上下料在一定程度上提高了生产效率。
随着智能制造行业的发展,工业机器人已被广泛应用于自动化生产线。笔者结合SolidWorks软件建模功能及RobotStudio软件仿真,实现了一台工业机器人在两条流水线配合作业。通过实时改变工业机器人的作业性能参数,对机器人上下料过程中的速度进行优化调整,得到最优的工业机器人作业生产节拍,为自动化生产线的调试与工业机器人作业性能的优化提供了一定的理论依据。
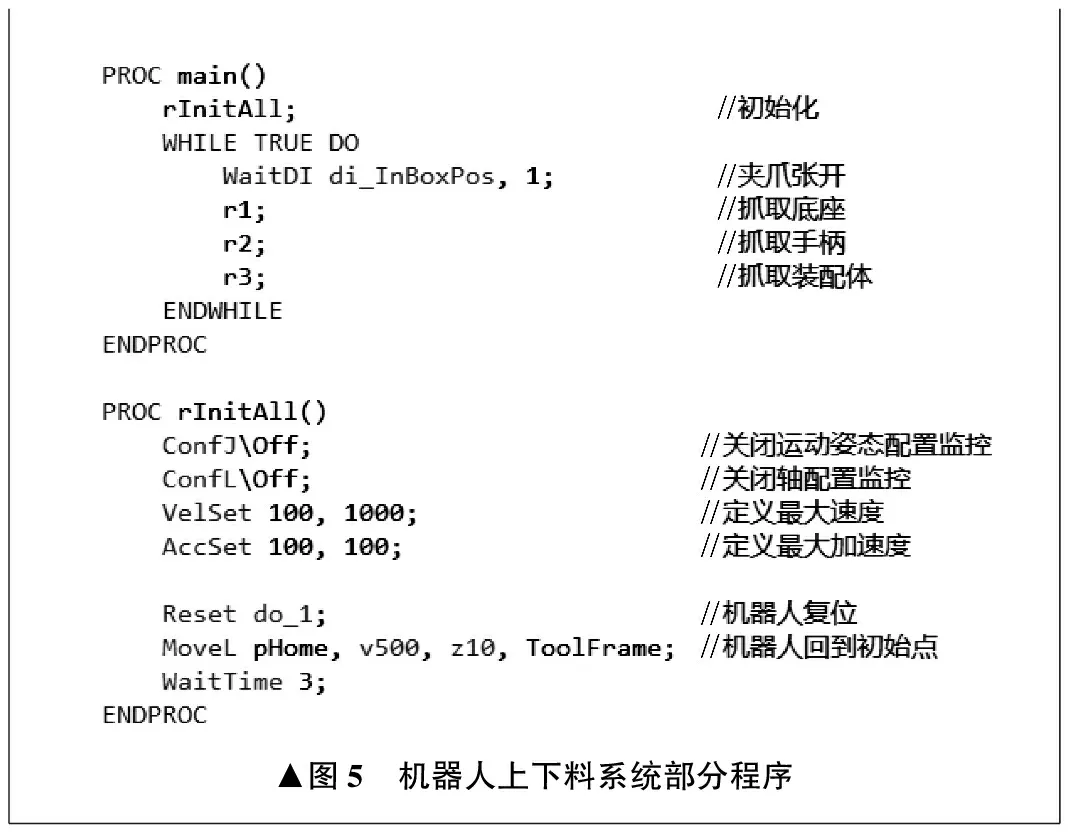
▲图5 机器人上下料系统部分程序
猜你喜欢
能源工程(2022年2期)2022-05-23
防爆电机(2021年4期)2021-07-28
铁道通信信号(2020年6期)2020-09-21
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
铁道通信信号(2019年3期)2019-04-25
中成药(2018年2期)2018-05-09
山东工业技术(2016年15期)2016-12-01
初中生世界·八年级(2016年10期)2016-09-10
小雪花·初中高分作文(2015年7期)2015-09-23
