
燃煤机组宽负荷运行一次调频精准控制的仿真研究
2021-08-23 12:37张彪,岳良,李鲁
湖北电力 2021年3期
张 彪,岳 良,李 鲁
(国网湖北省电力有限公司电力科学研究院,湖北 武汉 430077)
0 引言
随着风电、光伏等分布式新能源规模化发展,提高火电机组灵活性、实现火电机组深度调峰运行势在必行。火电机组深度调峰负荷下,火电机组热力系统动态特性与常规调峰负荷差异显著,主要表现在系统惯性加大、抗干扰能力变差等方面。因此,电网侧不仅面临着新能源消纳能力的考验,其系统频率调节能力和动态稳定运行水平也面临较大风险。处于深度调峰模式下的燃煤机组具有良好的一次调频能力,对有效消除新能源发电负荷的随机扰动、维护电网功率的平衡和频率的稳定具有重要意义。近年来,国内多所试验单位对常规调峰负荷下的一次调频能力进行了分析和优化,取得了较好效果[1-20]。对火电机组深度调峰调频的建模及控制优化方面的研究工作也方兴未艾,文献[21]分析了深度调峰负荷下亚临界机组简化非线性模型参数变化规律,结合PID控制实现了亚临界机组的宽负荷调峰;文献[22]将基于不同负荷段调速系统的多模型预测控制和PID控制相结合,保证了机组在超低负荷运行时的一次调频性能;文献[23]基于一次调频模型的经验知识确定模型结构,结合一种改进群优化算法辨识获得模型参数,得到在深度调峰状态下一次调频能力与常规负荷条件下相比调频裕度变大、需优化调整一次调频控制参数的结论。
本文提出一种基于虚拟参考反馈算法(Virtual Reference Feedback Turning,VRFT)和经典PID控制相结合的控制器直接设计方法。结合某600 MW超临界机组汽轮机动态数学模型,用随机信号激励模型获得输入输出数据,根据该数据列直接设计一次调频负荷控制器。仿真结果表明,用该方法设计得到的低负荷一次调频回路无超调,收敛快,能够实现较参考模型的精准控制,并具有良好的抗噪声能力和鲁棒性。
1 汽轮机动态数学模型
本文采用一种动态双过调改进模型[24],模型结构如图1所示。经过传递函数框图的等效变换分析可知,该模型由7个前向环节构成一个有自平衡能力的对象。各参数物理意义明确,Tp1为高压缸蒸汽容积时间常数;Tp2为再热器蒸汽容积时间常数;Tp3为连通管蒸汽容积时间常数;α1为高压缸功率比;α2为中压缸功率比;α3为低压缸功率;NGV为进入汽轮机的蒸汽流量;NM为汽轮机转子的机械功率输出;λg为高压缸功率自然过调系数;λz为中压缸功率自然过调系数。

图1 汽轮机动态模型原理图Fig.1 Principle diagram of steam turbine dynamic model
图2为机组四个典型工况下一次调频模型的阶跃响应曲线,可见,对汽机侧而言,一次调频模型的动态特性变化不大,且随着机组负荷的降低汽机调功将更加灵敏,用传统PID控制即可取得较好的效果。
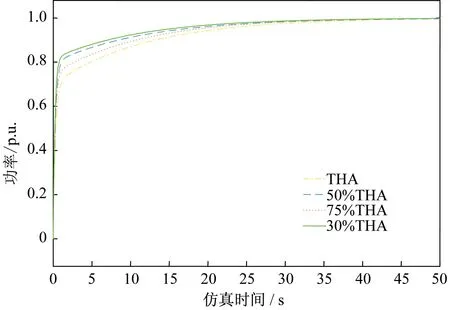
图2 典型工况汽轮机模型阶跃响应Fig.2 Step response of steam turbine model under typical conditions
2 虚拟参考反馈算法
虚拟参考反馈算法(VRFT)最早由Guardabassi G.O.提出[25-30],其本质是一个模型参考控制问题。图3为标准单回路模型参考控制框图。控制器C(z;θ)作用于闭环控制系统时,如果该闭环系统被一参考信号r(t)激励,它的输出为M(z)r(t)。因此,使该闭环系统的传递函数和参考模型一样的一个必要条件是这两个系统有相同的输出。如果已经采集了对象的两组数据,一组是输入u的测量值,另一组是对应的输出y的测量值。给定测量值y(t),考虑一个参考信号r(t),使M(z)r(t)=y(t),其中M(z)是期望的闭环控制系统的虚拟参考模型,y(t)是闭环控制系统的期望输出。之所以称之为虚拟参考是因为参考模型M(z)不是用来产生输出y(t)的。然后,计算相应的跟踪偏差e(t)=r(t)-y(t)。尽管对象P(z)是未知的,但当P(z)被u(t)(实际测量的输入信号)激励时,它将产生y(t)作为输出。因此,可根据u(t)和y(t)来辨识u(t)和e(t)之间的动态关系,即为控制器的动态特性。
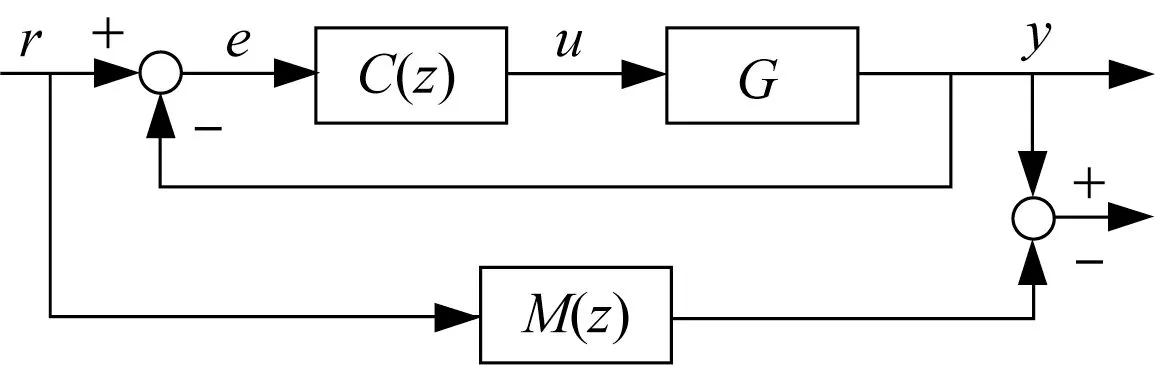
图3 单回路模型参考控制框图Fig.3 Single-loop model reference control block diagram
以上所述的方法可通过如下的4个步骤来完成。
步骤2:选择合适的滤波器L(z)来筛选信号u(t)和e(t):eL(t)=L(z)e(t),uL(t)=L(z)u(t);


3 仿真实例
按照上文给出的虚拟参考设计方法的设计步骤,如式(2),由此可见,只需解决一个线性二次指标问题即可获得最优控制器参数向量。在获得虚拟参考输入y0(t)和输入控制器的偏差信号之后,采用最小二乘法对已知结构控制器的参数向量进行辨识。图4为不同噪声水平下闭环系统的频率特性和参考模型的频率特性的比较图。a、b、c、d的噪声方差σ2分别为0.001、0.1、0.25、1。由图4可见,随着噪声水平的增加,闭环系统的频率特性和参考模型频率特性之间的差别越来越大。然而,该图也反应了VRFT方法本身具有一定的鲁棒性。
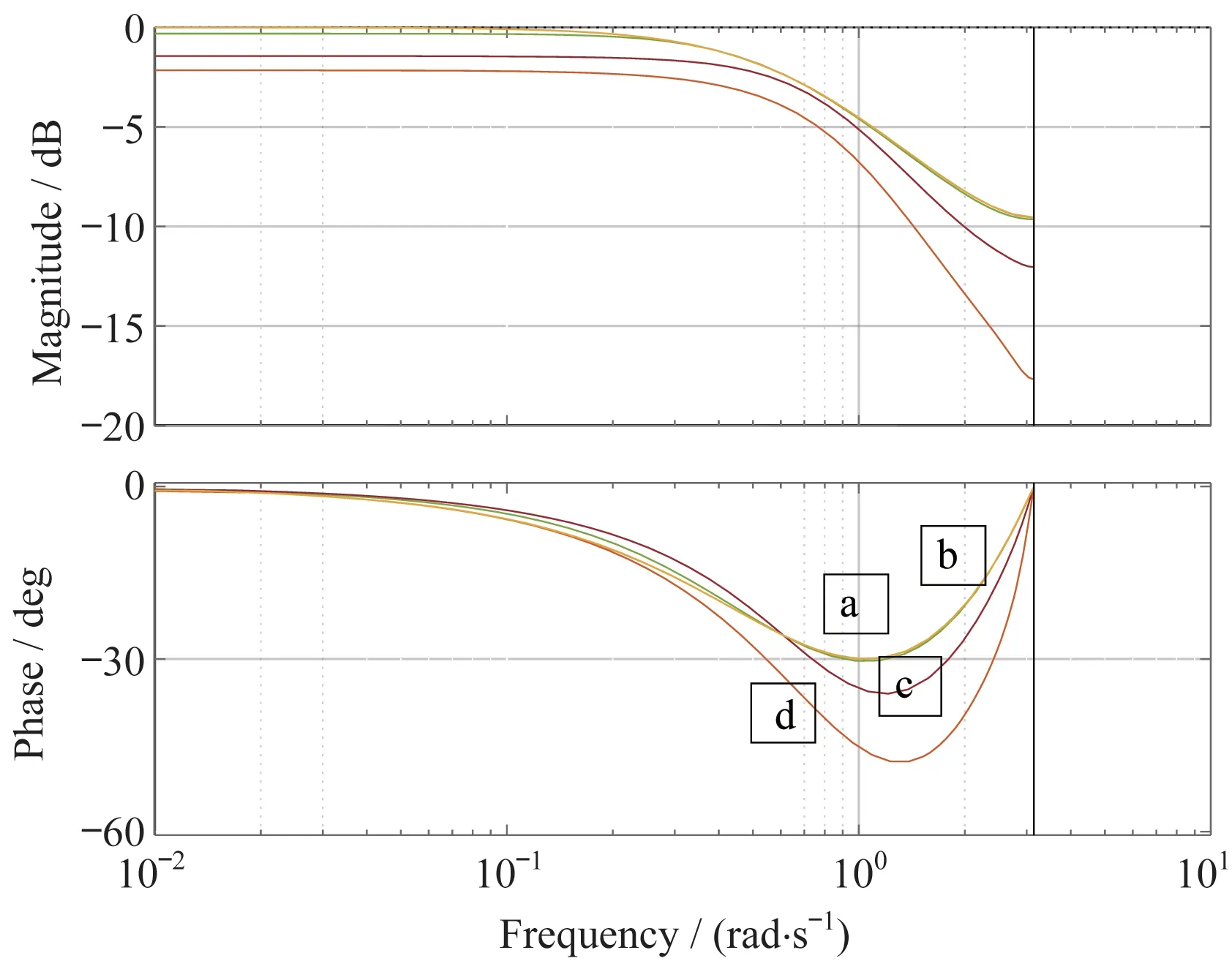
图4 不同噪声水平下闭环系统频率特性Fig.4 Frequency characteristics of closed-loop system under different noise levels
4 基于VRFT-PID的一次调频仿真
以上介绍了VRFT方法的基本原理,并给出了该方法在标准单回路控制系统中应用的仿真实例。本节将VRFT算法应用于一次调频控制,为便于工程实现,控制器仍采用传统PID。工程实践中,通过汽轮机调速系统建模试验获得并网机组参与电网一次调频的数学模型,为电力系统的中长期稳定性仿真分析提供依据。在进行该项试验时往往发现一次调频闭环系统动态超调大、稳定时间长等问题,给现场辨识带来难度,也不利于电网的稳定运行。采用VRFT-PID方法设计得到的一次调频控制回路可以实现实时电量的精准控制。
图5为各典型工况下一次调频闭环系统的阶跃响应曲线。可见,采用VRFT-PID设计得到的一次调频控制系统在阶跃信号激励下对闭环参考模型的逼近效果好,基本无超调,调节时间短,稳定性好,并且能够满足机组在各个工况下对一次调频的调节需求,具有良好的适应性。图6为30%THA工况下,闭环系统方波信号响应曲线。在设计好的闭环控制系统的输出叠加一个均值为0、方差为0.01的白噪声信号,控制系统仍能保持良好的调节品质,可见基于VRFT-PID方法设计的一次调频控制系统具有良好的抗噪声能力。

图5 典型工况一次调频阶跃响应Fig.5 Step response of primary frequency modulation under typical working conditions
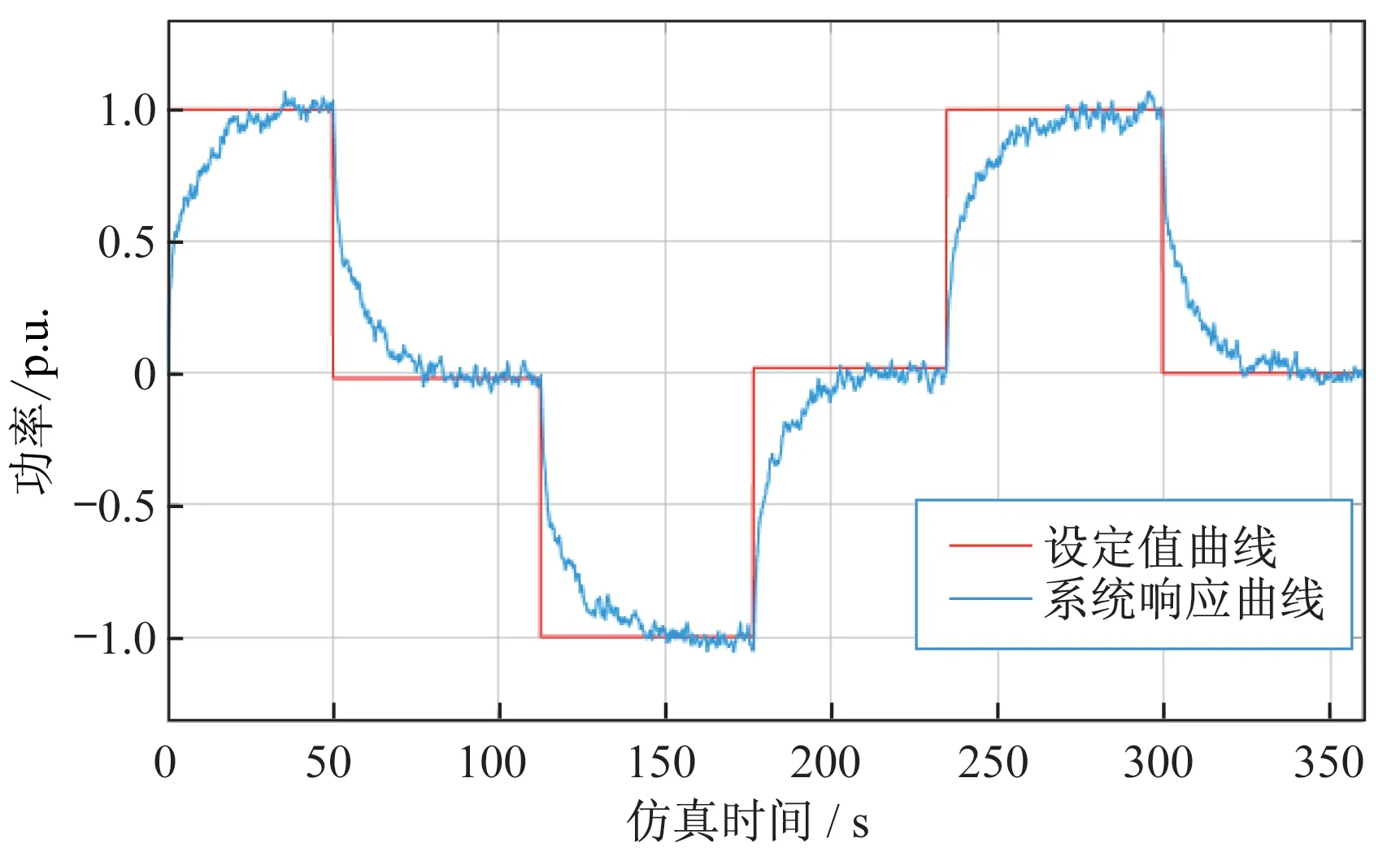
图6 有噪声时系统响应曲线Fig.6 Response curve of system with noise
5 结语
采用VRFT-PID设计一次调频控制系统的优点在于其能够在被控对象未知的情况下,把控制器参数整定问题转化为参数辨识问题,通过采集对象输入输出数据一次计算得到控制器参数。仿真研究表明,该方法计算简便,设计的控制系统具有良好的调节品质,且具有一定的鲁棒性和抗干扰能力。
大型燃煤机组在包含深度调峰工况的宽负荷运行状态下,机组的调峰调频能力限制因素主要在特性更加复杂的锅炉侧,充分挖掘机组的运行数据、优化机组调频调峰能力将是下一步要考虑的问题。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
能源工程(2021年5期)2021-11-20
煤气与热力(2021年7期)2021-08-23
煤气与热力(2021年5期)2021-07-22
煤气与热力(2021年2期)2021-03-19
科技传播(2019年24期)2019-06-15
消费导刊(2018年8期)2018-05-25
中国教育信息化·基础教育(2016年12期)2017-04-15
军事运筹与系统工程(2016年3期)2016-09-26
科教导刊·电子版(2016年21期)2016-08-23
