
工业废水处理的模糊控制器设计与仿真
2021-08-23 07:14李炫南
科学技术创新 2021年23期
李炫南
(中国电子科技集团公司第二十研究所 软件产品部,陕西 西安 710000)
1 工业废水pH 值中和处理控制策略
工业废水处理的主要方法是,控制碱液或酸液输入的阀门流量,使废液进行充分的中和反应,通过检测废水的PH 值,使其不断趋于中和点,最后在进行有害物质分解,达到废水排放标准。
废水处理的化学反应过程是一个存在严重非线性的动态过程,难以建立精确的数学模型。常规PID 控制控制简单、精确度高。模糊控制实时性好,鲁棒性强。这两者结合用于工业废水处理,可以获得更好的控制性能。
2 模糊PID 控制器设计
模糊PID 控制是基于常规PID 控制算法与模糊逻辑推理相结合的控制方法,其控制结构图如图1 所示。图中模糊控制器部分采用了双输入三输出的二维模糊控制器,输入变量为偏差e 和偏差变化ec,输出变量为KP、KI、KD。
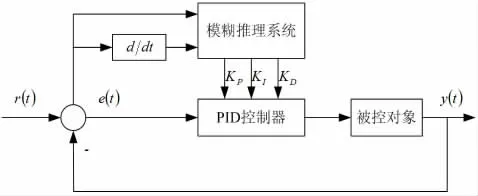
图1 模糊PID 控制结构图
模糊PID 控制器自整定控制方案流程图如图2 所示。需要经过输入模糊化、建立模糊控制规则、模糊推理、反模糊化等步骤。
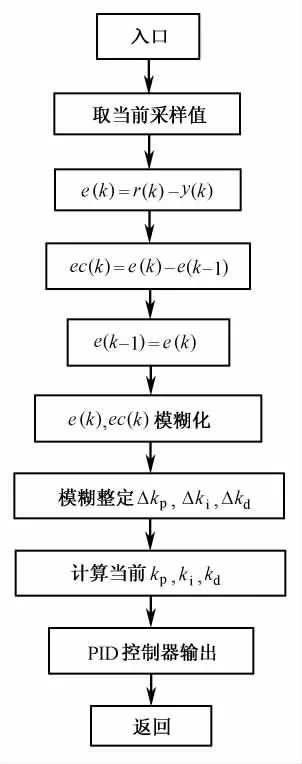
图2 PID 参数校正流程图
2.1 输入模糊化
系统偏差e 和偏差变化ec 变化范围定义为模糊集上的论域。

输入变量e、ec 采用三角形隶属度函数如图3-4。

图3 e 的隶属函数图
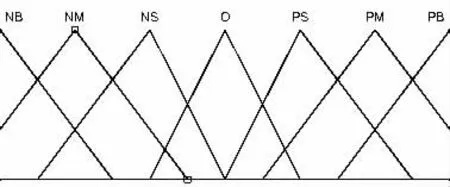
图4 ec 的隶属函数图

表2 ΔKi 模糊控制规则表
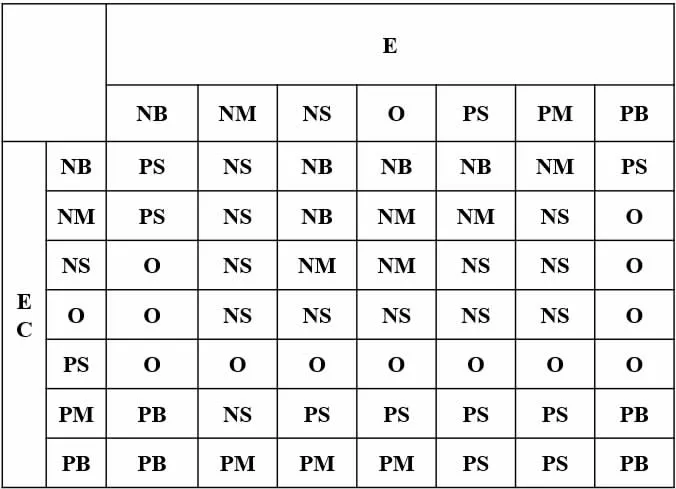
表3 ΔKd 模糊控制规则表
2.2 模糊控制规则
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对KP,KI,KD三个参数分别整定的模糊控制表,见表1-3。

表1 ΔKp 模糊控制规则表
根据上诉模糊规则表,通过模糊推理得到PID 参数的模糊矩阵表,查出PID 参数修正参数代入下列公式计算:
式中,K'p、K'i、K'd是常规PID 参数。
2.3 输出反模糊化
通过模糊推理得到的结果是一个模糊集合,不能直接用来作为控制量,需要通过解模糊转化为精确数,才可以作为PID参数的校正值,实现模糊自整定功能。常用的PID 反模糊化方法有最大隶属度法、重心法、加权平均法。
3 仿真与分析
本文利用MATLAB 软件设计了模糊PID 控制系统的仿真模型如图5 所示,其中模糊控制器模块如图6 所示。
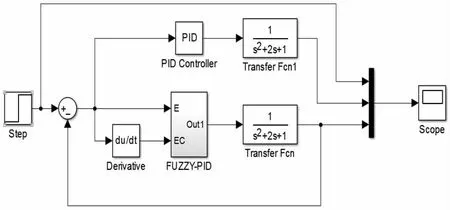
图5 模糊PID 控制系统仿真模型
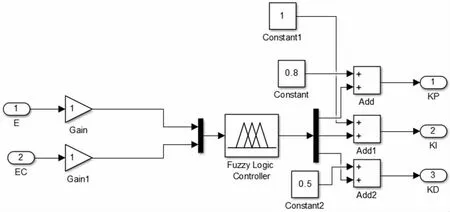
图6 模糊控制器摸块
被控对象等效为:G(s)=l/(s2+2s+1)。
采用阶跃信号作为输入,得到常规PID 控制器和模糊PID控制器的输出响应曲线如图7 所示。通过对比可知,模糊PID控制超调量更小,响应时间更短、反应速度更快。这表明对于工业废水PH 值处理,采用模糊PID 控制效果更好,性能更佳。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
河南科技(2022年9期)2022-05-31
现代装饰(2020年7期)2020-07-27
皮革制作与环保科技(2020年14期)2020-03-17
智富时代(2016年12期)2016-12-01
智富时代(2016年12期)2016-12-01
商(2016年28期)2016-10-27
戏剧之家(2016年14期)2016-08-02
今日湖北(2015年18期)2015-11-29
城市地理(2015年12期)2015-03-11
