
带记忆功能的汽车电动座椅系统
2021-08-21 06:53容建壮
工程技术与管理 2021年12期
容建壮
江门市兴江转向器有限公司,中国·广东 江门 529050
1 引言
电动座椅是指以电动机为动力,通过传动装置和执行机构来调节座椅的各种位置,为驾驶员提供便于操作、舒适而又安全的驾驶位置;为乘客提供不易疲劳、舒适而又安全的乘坐位置。按人体工程学的要求,座椅必须具有良好的静态与动态舒适性。其外形必须符合人体生理功能,在不影响舒适性的前提下,力求美观大方。座椅应采用最经济的结构,尽可能地减少质量。随着人们生活水平的提高,对汽车座椅的舒适性要求也越来越高,要求调节能够更加简单、方便、快捷,更简单更轻松地调整座椅位置,减轻驾驶疲劳,使人更舒适地操控汽车。汽车电动座椅以驾驶者的座椅为主,从服务对象出发,电动座椅必须要满足便利性和舒适性两大要求。也就是说驾驶者通过键钮操纵,既可以将座椅调整到最佳的位置上,使驾驶者获得最好视野,易于操纵方向盘、踏板、变速杆,还可以获得最舒适和最习惯的乘坐角度。现代家庭大多数都只有一辆轿车,但是驾驶员又有两名以上,这就使得每个驾驶员都要按照自己的习惯调整座椅的状态,这对驾驶员带来了很多不便。论文介绍的电动座椅系统是带记忆功能的电动座椅,能够把2 个驾驶员的座椅位置记录下来,即使其他驾驶员调整过座椅的状态,只要按一下记忆按键,座椅就可以恢复到记忆时的状态,对于多个驾驶员驾驶同一辆汽车有很大的便利性。
2 电动座椅执行系统结构
2.1 电动机
电动座椅大多采用永磁式电动机驱动,此类电动机多采用双向电动机。其电枢的旋转方向随电流方向的改变而改变,从而使电动机按照不同的电流方向进行正转或反转。并通过装在座位侧板上或门扶手上的肘节式控制开关来控制电路通路和电流方向,使某一电动机按所需的方向运转,以达到调整座椅的目的。为了防止动机过载,大多数永磁式电动机内装有热过载保护断路器。有些电动座椅采用直流电动机来驱动,并装有两个磁场线圈,使其可以双向运转。这种电动机多使用继电器控制电流方向。论文设计的电动座椅系统就是使用电机内部带霍尔传感器的直流电机,通过电机转动时产生的霍尔信号把电机的位置记录下来,当驾驶员按下记忆按键时就可以让座椅准确的回到记忆时的位置[1]。
2.2 座椅调节器
座椅调节器实际上就是用来调整座椅的各种位置,实现座椅水平前后移动、座椅上下移动、座椅靠背的6 个方向角度旋转的调节。当按下此开关后,电控单元就会控制相应电动机运转,按照驾驶员的要求调整座椅的位置。
2.3 控制系统
论文设计的电动座椅系统主要由主控微处理器、CAN 数据发送与接收模块、调节器模块、记忆按键模块、电机控制模块等组成,如图1所示。
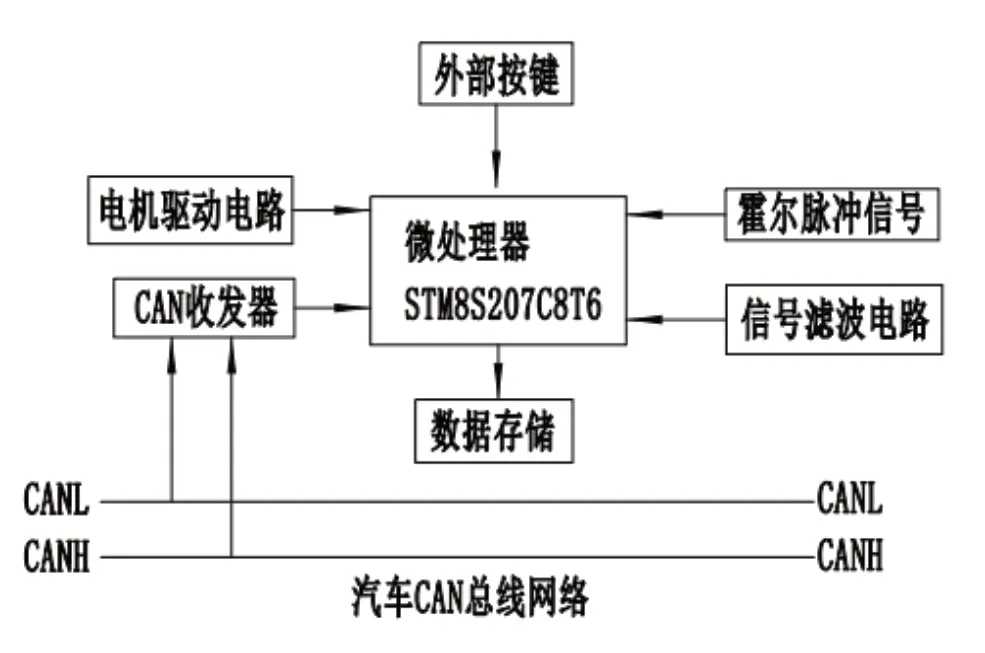
图1 电动座椅控制系统结构图
CAN 数据发送与接收模块负责接收汽车CAN 总线上传输的各种信息数据,如发动机信息、开关门信息、车况信息等,并在接收各种信息的同时把这些数据有规律的传输给主控微处理器。
微处理器接收到CAN 数据后立即进行CAN 的ID 过滤,当报文数据过滤成功后,按照设定好的的控制策略对数据进行相应的处理,并且将有用的信息保存到EEPROM 中,待有需要的时候可以读取出来使用。
调节器模块可以唤醒睡眠的微处理器激活电动座椅工作。通过调节器模块可以调整座椅的工作模式。论文的座椅有初始化模式、记忆模式和正常模式。
电机控制模块中包含了控制电机输出模块与电机霍尔脉冲信号接收模块。微处理器接收到调节器模块的信息后,控制相应的继电器驱动电机转动从而使座椅移动。电机霍尔脉冲信号接收模块把电机的霍尔信号传送到微控制器,微控制器通过计算霍尔脉冲数记录电机所转的圈数,当记忆按键模块被按下时,微控制器就控制继电器驱动电机转动,把电机恢复到当时记忆状态的圈数,实际上就是把座椅调整到记忆时的状态[2],从而记住座椅的位置。
3 CAN 总线介绍
CAN 是控制器局域网络(Controller Area Network,-CAN)的简称,是由研发和生产汽车电子产品著称的德国BOSCH 公司开发的,并最终成为国际标准(ISO11898),是国际上应用最广泛的现场总线之一。论文提到的是CAN2.0B协议。
3.1 CAN 总线特点
①CAN 是到目前为止唯一有国际标准的现场总线。
②CAN 为多主方式工作,网络上任一节点均可在任意时刻主动向网络上其他节点发送信息,而不分主从。
③在报文标识符上,CAN 上的节点分成不同的优先级,可满足不同的实时要求,优先级高的数据最多可在134us 内得到传输。
④CAN 采用非破坏总线仲裁技术。当多个节点同时向总线发送信息出现冲突时,优先级较低的节点会主动退出发送,而最高优先级的节点可不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。尤其是在网络负载很重的情况下,也不会出现网络瘫痪情况。
⑤CAN 节点只需通过对报文的标识符滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据。
⑥CAN 的直接通信距离最远可达10km;通信速率最高可达1Mbps。
⑦CAN 上的节点数主要取决于总线驱动电路,目前可达110 个。在标准帧报文标识符有11 位,而在扩展帧的报文标识符有29 位。
⑧报文采用短帧结构,传输时间短,受干扰概率低,保证了数据出错率极低。
⑨CAN 的每帧信息都有CRC 校验及其他检错措施,具有极好的检错效果。
⑩CAN 节点在错误严重的情况下具有自动关闭输出功能,使得总线上其他节点的操作不受影响。
3.2 CAN 数据帧结构
在CAN 总线进行数据通信的过程中,有2 种不同的帧格式,不同之处为标识符域的长度不同:含有11 位标识符的帧称之为标准帧;含有29 位标识符的帧称之为扩展帧。报文传输有4 个不同类型的帧:数据帧、远程帧、错误帧和过载帧。此处主要提及数据帧。数据帧由以下7 个不同的位域组成:帧起始、仲裁域、控制域、数据域、CRC 域、应答域和帧结尾。其中仲裁域包含标准格式和扩展格式,如图2所示。
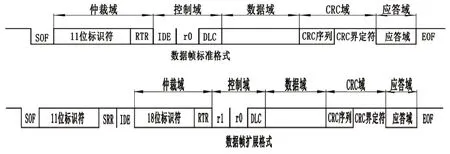
图2 CAN 仲裁域结构
4 电动座椅ECU 系统
论文的电动座椅ECU(Electronic Control Unit)系统主要由意法半导体公司(ST)的8 位微处理器STM8S207C8T6、Microchip 公司的MCP2561CAN 收发器、宏发继电器HFKA012-2ZSPT、TI 公司的ULQ2003L 和LM2902AVQDRQ1等电子元器件组成。图3为电动座椅ECU 系统的完整原理图。

图3 电动座椅ECU 系统原理图
4.1 主控CPU
STM8S207C8T6 微处理器可配置16 位控制定时器、信号捕获/比较功能模块、PWM 控制器以及SCI、SPI、I2C 和CAN2.0B 总线接口。芯片内置16MHz 高精度阻容振荡器可以省去外部时钟信号源,具有上电复位(POR)和欠压复位(BOR)功能,可以节省外部复位电路。该微处理器是新一代基于STM8 内核的STM8S 系列产品。新系列微控制器整合新一代内核的高速度、处理性能和代码效率,以及多用途外设接口,并具备多项特殊功能,可提高芯片的强轫度和可靠性。片内集成的存储器(包括真EEPROM)可以简化应用仿真。在电子应用中,可以降低系统成本,缩短应用开发周期,提高处理性能。其引脚定义如图4所示。
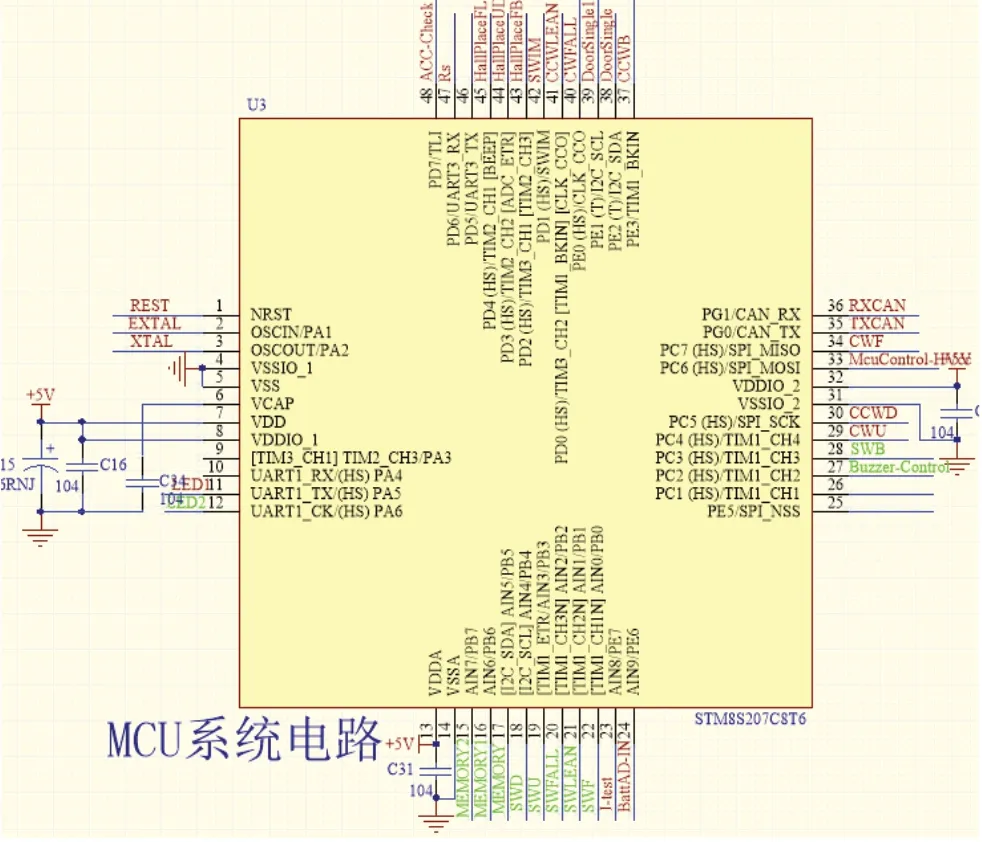
图4 主控CPU 电路图
4.2 MCP2561 CAN 收发器
MCP2561 是一款采用8 引脚封装的高速CAN 收发器,并设有一个Vio 引脚。Vio 引脚可以连接辅助电源,以便在内部对CAN 收发器的数字I/O 进行电平调节,从而便于与单片机的连接。这对使用小于5V(例如1.8V 或3.3V)的Vdd单片机系统非常有利,而且消除了对外部电平转换器的需求,降低了系统成本及复杂性。符合高达14 kV ESD 性能的全球EMC 要求,提供了行业的低待机电流,有多种外形尺寸小巧的器件可供选择。具有业界的低待机电流功耗(典型值为5μA),有助于满足汽车电子控制单元(ECU)的低功率预算要求。其硬件电路设计如图5所示。

图5 CAN 收发器电路图
微处理器STM8S207C8T6 首先对内部的CAN 模块进行初始化设置,其中包括CAN 通信的波特率、采样时间、标识符滤波寄存器、屏蔽寄存器、错误中断寄存器和中断使能寄存器等配置。初始化完成后,微处理器打开CAN 接收中断使能,并通过IO 输出控制RS 引脚脚将MCP2561 置于Normal 模式与其进行正常的数据交换。微处理器实时接收汽车的CAN 总线传输给MCP2561 的数据,通过设置CAN 通信的波特率、标识符滤波寄存器与屏蔽寄存器过滤出对电动座椅系统有用的CAN 数据,然后进行相应的数据处理。当汽车处于熄火或工作时,判断汽车CAN 总线的活跃状态,控制电动座椅控制器进入睡眠模式或者唤醒电动座椅控制器;从而降低整个系统的功耗。
4.3 电动座椅执行机构控制
论文的带记忆功能的电动座椅系统具有6 向调节的功能,实现座椅水平前后移动、座椅上下移动、座椅靠背6 个方向的角度旋转调节;通过3 个带霍尔信号输出的电机来实现调节的功能。控制电机转动的方式有两种,一种是使用4 个场效应管组成的H 桥驱动电机转动,一种是通过控制继电器的线圈使电机工作。前者成本比较贵,电路较为复杂,不符合市场的要求。论文的电动座椅系统采用第二种控制方式,具有电机功率小、功耗较低、堵转电流小等特点,可以进行全功率输出,既满足了安全可靠的要求,同时也降低了整个系统的成本[3]。电机驱动电路如图6所示。

图6 电机驱动电路图
座椅水平前后移动、座椅上下移动、座椅靠背的角度旋转实际上就是电机的正反转,论文中的继电器控制电机电路采用的是厦门宏发电声股份有限公司的HFKA012-2ZSPT 双胞继电器,继电器驱动芯片采用德州仪器公司(TI)公司的ULQ2003 芯片。微处理器通过IO 口输出控制信号给继电器驱动芯片ULQ2003,然后ULQ2003 输出相应的电平给HFKA012-2ZSPT 继电器的线圈,使得继电器的触点吸合,这样电机就开始转动了。
4.4 记忆座椅位置原理
电动座椅的位置根据驾驶员的调节而定,每个驾驶员的位置都不一样。要准确记录每个驾驶员的舒适位置就需要有带霍尔信号输出的电机。霍尔信号需要经过一些硬件电路的处理才可以给微控制器使用,电机霍尔信号处理电路如图7所示。电动座椅的电机在转动过程中一直输出霍尔信号,这些霍尔信号就可以作为座椅位置的依据。微处理器控制电机在转动的同时一直采集电机的霍尔信号,直到电机停止为止,然后通过公式计算得出一个相对的位置,并把数据存放在EEPROM 中。当按下记忆按键后,微控制器就读取EEPROM 中的值,控制电机转动到相应的位置,从而实现了记忆座椅位置的功能。
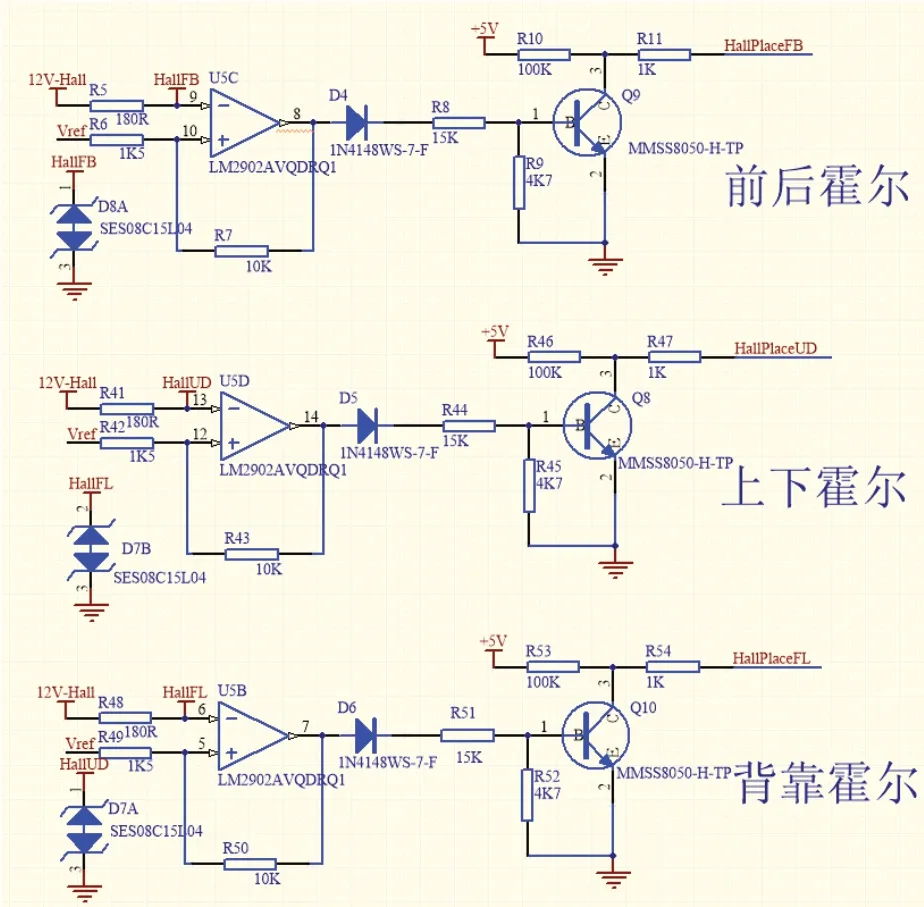
图7 霍尔信号处理电路
5 电动座ECU 控制原理
5.1 控制方法
论文中设计的电动座椅控制器是采用标志位轮询的方法;当微处理器的系统初始化完后,微处理器就进入CAN 总线的状态查询模式;当CAN 总线上有数据传输时,微处理器就根据自身内置的CAN 滤波寄存器与屏蔽寄存器的配置,识别正确的CAN 报文。正确的CAN 报文会引起CAN 接收中断,并根据控制策略对接收的报文数据进行处理,如ACC_ON 点火标志、中控门锁信号标志等信号标志;再根据接收到的座椅调节器信号和记忆按键信号判定电机的转动方向和时间,从而控制电机工作[4]。电动座椅ECU 控制原理图如图8所示。
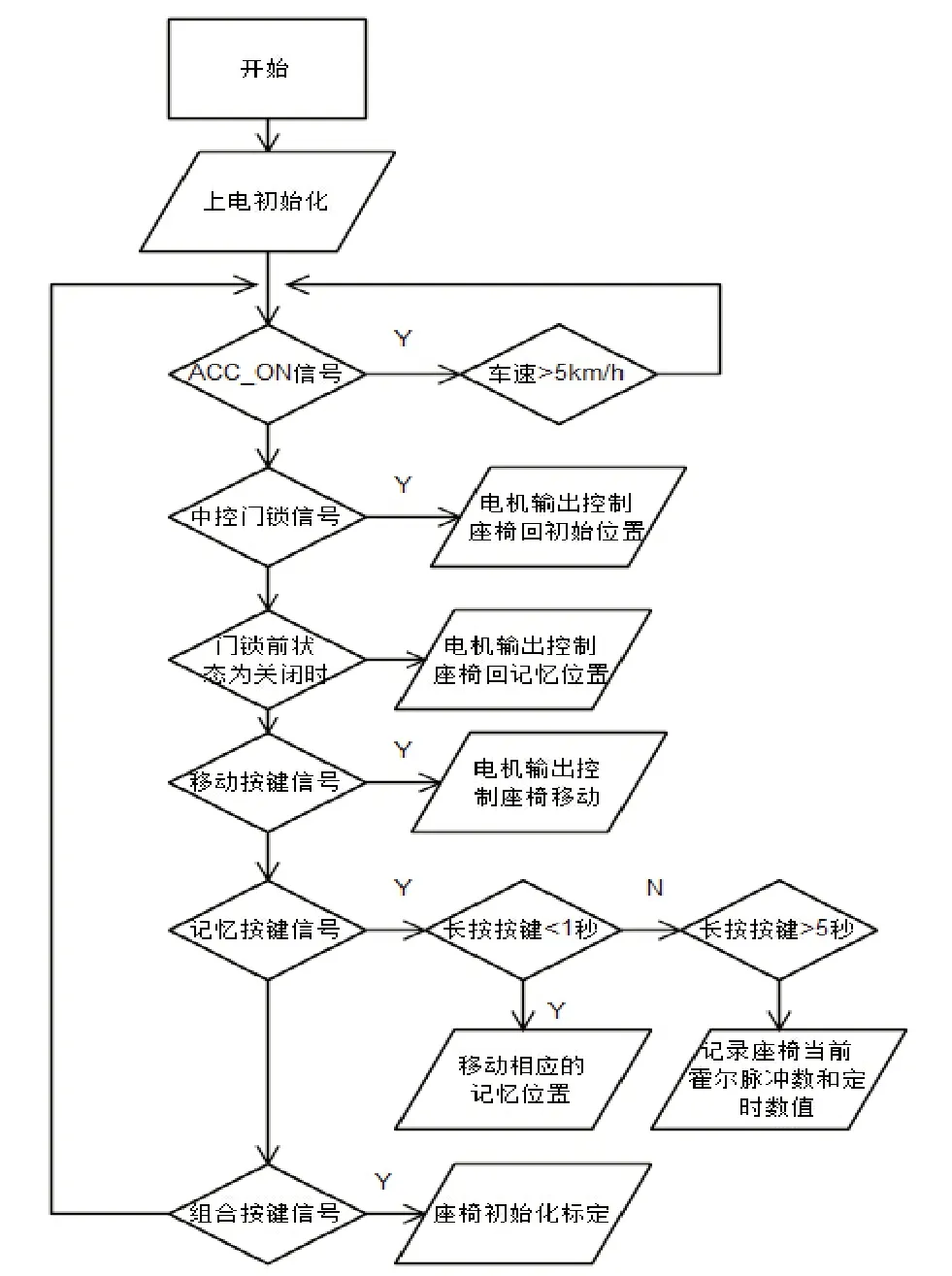
图8 电动座椅ECU 控制原理图
5.2 控制器的功能
①当ACC_ON 点火标志且车速大于5km/h 标志成立时,电动座椅不工作,保证高安全性。
②中控门锁信号标志、移动按键信号标志、组合按键信号标志成立时,均打开定时计时中断程序和霍尔脉冲信号捕捉程序。中控门锁信号标志成立时,表示车主离开汽车,此时电动座椅将自动回到初始位置,而当中控门锁被打开后,若前一次状态为关门,则电机驱动座椅去到上一次记忆位置。
③移动按键信号成立时,表示手动控制调节座椅位置,电机驱动座椅移动到相应的位置,同时开启定时中断、捕捉中断程序,记录座椅的运行轨迹,以便进行记忆存储。另外,由于电机的差异和电动初始起动霍尔不稳定,会造成霍尔脉冲数的数据有差异,为解决此问题,在软件设计方面通过电机输出控制的初始50ms 的霍尔脉冲数不纳入计数范围,以避免上述情况的干扰,保证了记数稳定。
④记忆按键信号成立时,立即进行按键计时,若按下按键小于1 秒,则表示进行当前座椅位置记忆,并存储到微处理器的EEPROM 中。若按下按键大于5 秒,则表示调用当前按键的记忆位置,此时电机将驱动座椅移动。
⑤组合按键信号成立时,表示标定座椅初始位置。此功能主要方便调试人员在初装座椅时进行一次初始位置标定。另外,基于CAN 总线传输,实时读取整车信号状态还有以下几个主要功能:在安全模式下,通过座椅下的压力传感器,实时判断驾驶员是否配带安全带;舒适模式下,在冬天季节可通过按键选择对座椅靠背进行加热;在锁车模式下,根据CAN 总线的传输状态,适当使电动座椅控制器进入睡眠状态,降低功耗。
6 结语
论文带记忆功能的汽车电动座椅系统实现了座椅水平前后移动、座椅上下移动、座椅靠背6 个方向的角度旋转调节。同时可以把座椅的位置记录下来,通过记忆按键把座椅的位置恢复到记忆时的状态。主要通过由意法半导体公司(ST)的8 位微处理器STM8S207C8T6、Microchip 公司的MCP-2561CAN 收发器、宏发继电器HFKA012-2ZSPT、TI 公司的ULQ2003L 和LM2902AVQDRQ1 等电子元器件组成的电路图和通过微控制器软件编程实现上述功能。使用CAN 总线可以有效减小与汽车之间的连接线、提高数据传输的速率和可靠性。这个系统成本低、实用性功能多、产品质量可靠,市场上类似产品相比具有一定的优势。
猜你喜欢
电子制作(2021年3期)2021-06-16
童话王国·文学大师班(2017年6期)2017-07-10
微特电机(2017年10期)2017-05-15
电子制作(2016年1期)2016-11-07
故事作文·低年级(2016年7期)2016-05-14
工业设计(2016年5期)2016-05-04
太空探索(2015年6期)2015-07-12
汽车维护与修理(2015年7期)2015-02-28
长春工业大学学报(2013年2期)2013-08-16
单片机与嵌入式系统应用(2011年10期)2011-06-25
