
一种磁悬浮轴承功率放大器控制方法
2021-08-21 09:48:28贺永玲胡叨福
电子制作 2021年14期
贺永玲,胡叨福
(珠海格力电器股份有限公司,广东珠海,519070)
0 引言
磁悬浮轴承通过电磁力将转轴稳定悬浮,具有无机械摩擦、损耗小、无润滑的特点,适用于高速旋转的场合[1]。磁悬浮轴承的功率放大器将控制电压信号转换为相应控制电流输入电磁铁中,生成控制力,是磁悬浮轴承系统能量转换的关键部分,也是影响磁悬浮轴承稳定性的关键因素之一,磁悬浮轴承功率放大器的主电路拓扑有单臂式、半桥式、单相全桥式、多桥臂式等多种结构[2]。
对于主动式磁悬浮轴承,其电流仅需单向流动,一般采用半桥式结构开关功率放大器。一套主动式磁悬浮轴承系统中,需要对转轴的前径向XY、后径向XY、轴向Z共五个自由度进行控制,故共有10个电磁线圈,需要10个半桥式功率放大器[3]。对于半桥结构的开关功率放大器的驱动电路,通常需要2路相互隔离的控制电源,一路用于上桥臂开关管的驱动,一路用于下桥臂开关管的驱动,10个开关功率放大器,至少需要11路相互隔离电源,其中,上桥臂的驱动电源相互隔离,所有下桥臂的驱动电源可共用。这样所需要的电源数目众多,设计十分复杂,而且可靠性也难以保证,可使用自举电路来实现功率放大器的单一电源供电,实现自举有一个关键问题是如何保证自举电容电压始终都能满足开关管驱动电压的要求,这是保证开关功率放大器可靠运行的关键。现有技术中,对自举电容初始化充电以及正常运行时的充电有深入的研究,这些技术可实现自举电容的充分充电,以达到开关功率放大器的可靠运行。但在磁悬浮轴承系统中,由于外力的作用,轴承线圈中的电流可能存在长时间为0的状态,此时自举电容不能及时充电,将导致其电压不断下降,若其电压下降到开关管正常驱动电压以下,在下次启动来临时,容易因开关管处于不完全导通状态下而损坏,本文将结合磁悬浮轴承开关功率放大器的工作方式进行详细分析并提出解决方法。
1 磁悬浮轴承开关功率放大器工作原理
半桥式开关功率放大器拓扑结构如图1 所示。其中,UDC为直流母线电压,L和RL分别为线圈的等效电感与电阻,Q1、Q2为开关管,D1、D2为续流二极管。UD为开关管驱动电源,HVIC为上桥开关管驱动芯片,LVIC为下桥开关管驱动芯片,自举电路由自举二极管D3,自举电容C1和限流电阻R1组成,自举电容提供上桥臂器件开通时栅极充电所需电荷,并提供上桥臂驱动芯片HVIC中逻辑电路消耗的电流。
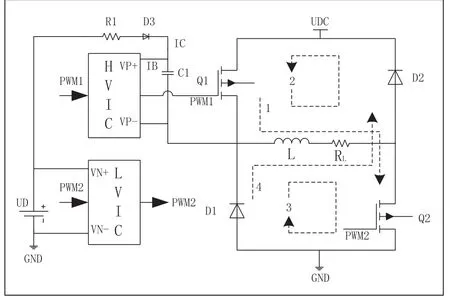
图1 半桥式开关功率放大器拓扑结构
为了达到减少电流纹波、实现电流的精确控制,以及提高电流的响应速度,开关功率放大器通常采用三电平控制,即驱动信号PWM1和PWM2相位相差180°,如图2所示,三电平功率放大器输出给负载两端的电压有+UDC、0、-UDC共三种工作状态,分别是电流增加状态、电流续流状态、电流减小状态[4]。
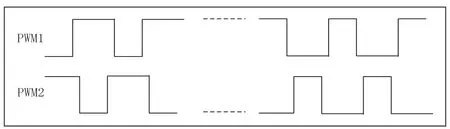
图2 开关管驱动信号相位相差180°
图1 中虚线1–4分别为功率放大器四种工作状态:
状态1:Q1和Q2都导通,轴承线圈充电。自举电容负端电压约为UDC,自举二极管反向截止,自举电容放电,电压逐渐降低;
状态2:Q1导通,Q2关断,轴承线圈电流通过D2、Q1续流。自举电容负端电压约为UDC,自举二极管反向截止,自举电容放电,电压逐渐降低;
状态3:Q1关断,Q2导通,轴承线圈电流通过D1、Q2续流。自举电容负端电压约为GND,自举二极管正向导通,自举电容充电,电压逐渐升高;
状态4:Q1和Q2都关断,轴承线圈电流通过D1、D2放电。自举电容负端电压约为GND,自举二极管正向导通,自举电容充电,电压逐渐升高。
2 磁悬浮轴承功率放大器自举电路可靠充电实现方式
在主动式磁悬浮轴承系统中,一般采用差动电流控制,差动电流是指在一个自由度中有两个作用相反的轴承线圈在工作,这种布局使得系统既能产生正向力,又能产生反向力[5]。
当转子偏离参考位置S0时,由传感器测出此时转子偏离参考位置的位移sx,位移调节器将这一位移信号变换成控制电流ic,这样得到其中一个轴承线圈的电流参考值为偏置电流I0与控制电流ic之和,即I0+ic,而另一个轴承线圈的电流参考值为偏置电流I0和控制电流ic之差,即I0+ic,并分别通过电流调节器实现对轴承线圈电流的控制。一个自由度上总电磁力F为:

式中,μ0为真空中磁导率;A0为电磁铁的磁极面积;N为线圈匝数。
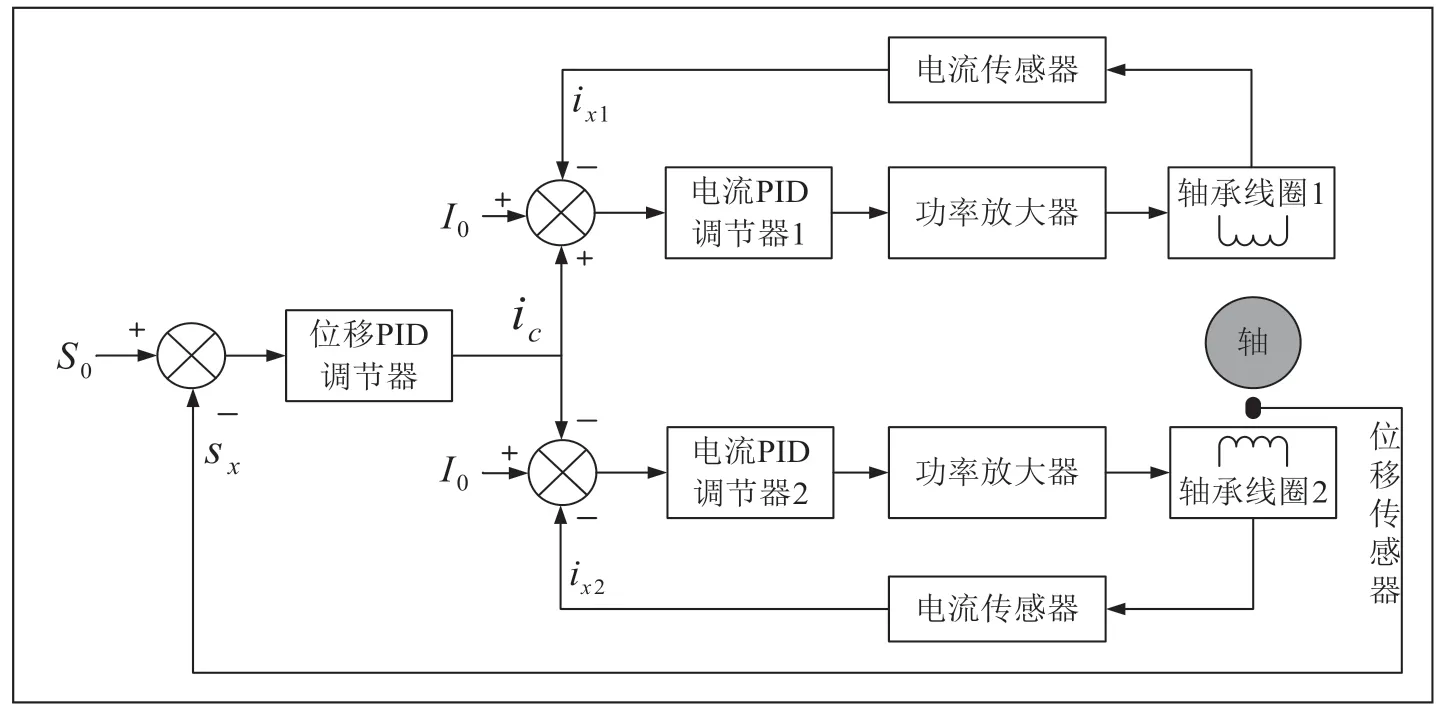
图3 磁悬浮轴承差动控制框图
假设当转轴持续受到一个向下的外力时,此时通过位移调节器输出的控制电流ic增大,即轴承线圈1的电流增大,轴承线圈2的电流减小,当外力增大到一定程度时,轴承线圈2的电流减少到0。如果外力持续时间较长,则轴承线圈2中的电流长时间为0,通过电流调节器计算,输出给功率放大器的PWM信号占空比将降为0,则不存在Q2导通或D1续流的状态,自举电容无充电回路,将导致其电压不断下降,当电压降低到开关管开通所需最低电压,那么在下次启动来临时,存在因开关管处于不完全导通状态而损坏的风险。
针对上述问题,本文提出了一种稳定可靠的自举电容充电控制方法,以保证开关功率放大器的可靠运行。解决的办法是根据线圈中有无电流来限制PWM的最小值,当线圈中有电流时,PWM占空比最小值不作任何限制,因为自举电容总是存在充电的机会,当轴承线圈电流为0时,此时需要将PWM占空比限定在0到50%之间的一个值,因为PWM占空比大于50%开关管存在同时导通,则线圈充电,电流不为0,影响轴承悬浮控制,PWM占空比过小,则有可能存在充电不足,下面对满足充电要求的占空比值进行分析。
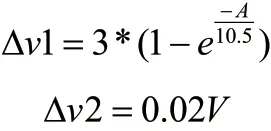
设自举电容电压为Uc1,开关管驱动欠压保护电压为U0,自举电容仅在下桥开关管Q2导通时进行充电,为了简化分析,忽略轴承线圈电感,可得到充电时自举电容电压的增值Δv1为:

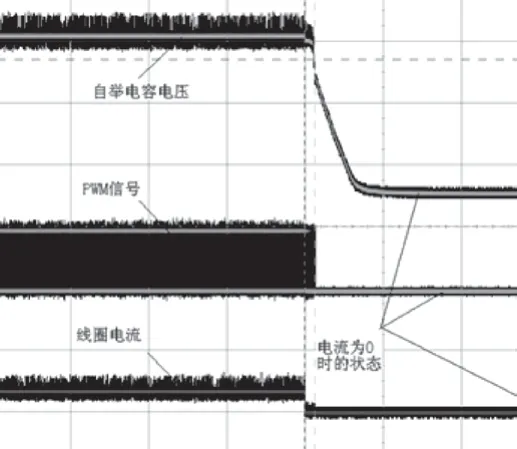
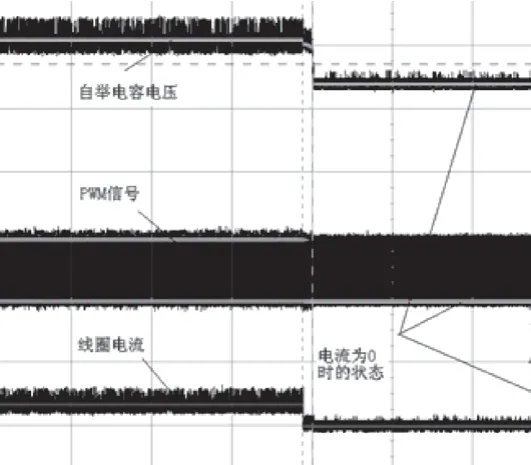
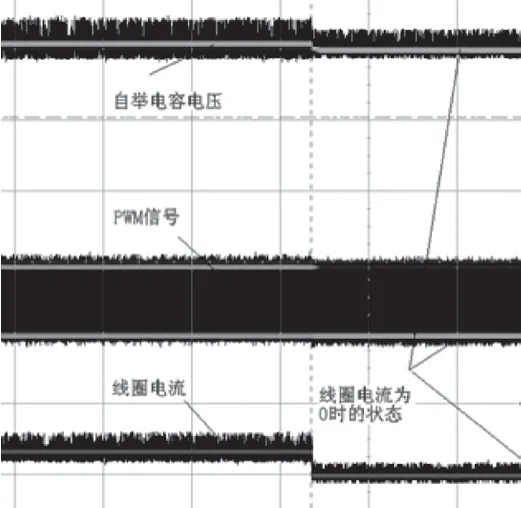
上式中,P为载波频率,A为PWM占空比(0 自举电容需要提供HVIC静态消耗电流和Q1栅极驱动电流,设在一个PWM周期内,自举电容平均消耗电流为IB,可得到自举电容放电所降低的电压Δv2为: 为了满足可靠驱动,自举电容充电电压增值必须大于放电电压降低值,即: 根据式(2)、式(3)和式(4),则可求得满足要求占空比值A。 设UD=15V,P=10kHz,UD3=UQ2=1V,R1=100Ω,RL=5Ω,U0=10V,C1=10μF,IB=0.002A,则可得到: 求得最小占空比A为7%,下面通过实验验证: (1)当轴承线圈电流为0时,将PWM占空比设为0,自举电容电压逐渐降为0。 图4 充电PWM占空比设为0 (2)当轴承线圈电流为0时,将PWM占空比设为5%,小于7%,自举电容电压降到9V,小于开关管驱动欠压保护电压U0,存在损坏开关管的风险。 图5 充电PWM占空比设为5% (3)当轴承线圈电流为0时,将PWM占空比设为15%,自举电容电压维持在13V,大于开关管驱动欠压保护电压U0,满足开关管可靠驱动电压。 图6 充电PWM占空比设为15% 本文对半桥式磁悬浮轴承开关功率放大器的工作原理进行了分析,并根据其工作特点,对自举电容的充电方法进行了优化,可实现开关管的可靠驱动,大幅提升了磁悬浮轴承运行的稳定性和可靠性,具有重要实用价值。

3 试验及结果
4 结论
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23 13:48:30
莆田学院学报(2021年5期)2021-11-13 06:36:38
小学科学(学生版)(2021年4期)2021-07-23 01:24:18
石材(2020年7期)2020-08-24 08:28:04
甘肃科技(2020年20期)2020-04-13 00:30:22
电子测试(2018年14期)2018-09-26 06:04:10
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:31
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:46:03
电测与仪表(2016年1期)2016-04-12 00:35:12
专用汽车(2016年4期)2016-03-01 04:14:17
