
基于卡尔曼方法的历史建筑不均匀沉降预测
2021-08-20 09:12陈小杰龚赛博
桂林理工大学学报 2021年2期
陈小杰, 龚赛博
(1.上海房屋质量检测站, 上海 200031; 2.上海理工大学 环境与建筑学院, 上海 200093)
随着当前城市化速度的加快, 城市基础设施大规模升级。地铁和隧道等地下工程的施工可能对历史建筑周围的土体造成扰动[1]。历史建筑物由于建造年代久远, 材料和结构老化, 其抗变形能力很差, 在土体扰动下容易发生不均匀沉降。当不均匀沉降过大时, 结构会产生开裂、 倾斜等现象, 甚至危害历史建筑的安全。因此, 需要定期对历史建筑进行沉降观测, 并预测其不均匀沉降趋势。
卡尔曼滤波模型和回归分析模型是常用的数据分析和预测模型, 常用于预测施工中建筑物的不均匀沉降[2]。回归分析模型是一种静态的数据分析模型, 根据不均匀沉降与影响因子之间的相互关系建立回归方程, 以预测某一时刻历史建筑的不均匀沉降, 但是这种方法要求数据有一定的规律, 否则预测会产生较大误差, 而且不能实时处理监测数据, 预测成本较大[3]。卡尔曼滤波模型使用一组状态方程和观测方程来描述动态观测系统, 可以根据观测值不断地修正预测值, 其本质上是最优线性估计算法。相比于回归分析模型, 卡尔曼滤波模型可以快速、 实时地处理大量监测数据, 预测成本较低, 并且它可以将系统状态和观测信息有机结合, 有效提高不均匀沉降的预测精度[4]。基于卡尔曼滤波模型的优势, 本文构建了卡尔曼滤波沉降预测模型, 利用该模型对某历史建筑的不均匀沉降进行预测, 并与工程中常用的多项式回归分析模型进行了对比分析。
1 卡尔曼滤波沉降预测模型
1.1 观测系统的离散化模型

(1)
可用下面的连续性方程来表示:

(2)
此方程为常系数线性微分方程, 其解等于相应齐次方程的通解和非齐次方程特解的和。求解过程已在文献[5]中详细描述, 此连续线性微分方程的解为
(3)
将上式进行离散化

(4)
若用下标k+1和k分别表示tk+1和tk, 对式(4)进行求解, 并设
(5)
即可得观测系统的状态方程
(6)
其中: Δt=tk+1-tk为观测间隔。由于相邻两次观测时间间隔相同, 取Δt=1。同时考虑到观测方程为
(7)
上述观测系统的离散化模型可以表示为
xk+1=Axk+Γwk,
(8)
yk=Bxk+vk,
(9)
其中:xk是系统状态向量;yk是观测向量;wk是系统噪声;vk是观测噪声;A为状态转移矩阵;B为观测矩阵;Γ为系统噪声的系数矩阵。
1.2 卡尔曼滤波过程
1.2.1 基本卡尔曼滤波模型 卡尔曼滤波模型可以利用观测信息实时、 快速地估计随时间不断变化的状态向量, 并对未来时刻的状态向量进行预测。实现过程为[7-8]
① 根据上一时刻的最优估计, 预测当前时刻的系统状态:
x(k|k-1)=A·x(k-1|k-1);
(10)
② 计算第① 步中当前时刻预测结果的偏差
P(k|k-1)=A·P(k-1|k-1)·AT+ΓQΓT,
(11)
其中:P为预测结果偏差的方差阵,P(k-1|k-1)表示上一时刻的预测偏差;
③ 计算当前时刻的卡尔曼增益
Kg(k)=P(k|k-1)·BT(B·P(k|k-1)·
BT+R)-1;
(12)
④ 修正第①步的预测, 获得当前时刻的最优估计结果
x(k|k)=x(k|k-1)+Kg(k)·[y(k)-
Bx(k|k-1)];
(13)
⑤ 计算相应于第④步当前时刻最优估计结果的偏差
P(k|k)=[I-B·Kg(k)]·P(k|k-1)。
(14)
因此, 只要给定初始值x(0|0)和初始估计结果偏差P(0|0), 利用观测值y1,y2, …,yk便可由上述的递推方程得到k时刻状态向量的最优滤波值x(k|k)。
1.2.2 卡尔曼滤波预测模型 基本的卡尔曼滤波方程实现了对状态的最优估计, 如果为了实现一步预测, 应采用卡尔曼滤波的一步预测方程对历史建筑的沉降进行预测[9]:
x(k+1|k)=A(k)x(k|k-1)+Kg*(k)·
[y(k)-Bx(k|k-1)],
(15)
其中, 预测模型的卡尔曼增益Kg*(k)和预测结果偏差P(k+1|k)分别为
Kg*(k)=A·P(k|k-1)·BT·[A·P(k|k-1)·
AT+R]-1,
(16)
P(k+1|k)=[A-B·Kg*(k)]·P(k|k-1)·
BT+ΓQΓT。
(17)
利用上述方程得到k+1时刻的最优预测值x(k+1|k), 实现对沉降的一步预测。当迭代n次时, 即可完成n步预测。
2 工程实例及沉降预测
由于临近地铁的施工对土体造成较大扰动, 影响了上海市黄浦区某历史建筑原有地基和基础的状态, 需要对其进行基础托换施工。该历史建筑于1934年竣工, 上部结构为现浇钢筋混凝土结构, 基础为双向钢筋混凝土条形基础, 平面形式近似矩形。为了防止该历史建筑在基础托换期间因不均匀沉降引发严重破坏, 对其进行静力水准系统自动化连续沉降监测。观测点均匀布置在该历史建筑四周的柱基上, 共布置19个观测点, 如图1所示, 其中S13为基准点。由于S01测点距离基准点最远, 且由各测点监测数据可知, 该测点的不均匀沉降最大, 因此本文对S01测点15期的监测数据进行分析。首先建立卡尔曼滤波的动态观测模型, 运用该模型对前10期监测数据进行滤波, 然后分别用卡尔曼滤波模型、 基于卡尔曼滤波的多项式回归分析模型和传统多项式回归分析模型对后5期数据进行预测对比分析。

图1 测点布置图
2.1 卡尔曼滤波模型

残差是实际观测值减去估计值(拟合值)所得之差, 它反映了估计值的准确程度[11]。结合卡尔曼滤波的递推公式和上述的初始状态。对比实际观测值和卡尔曼滤波值, 并进行残差分析, 得到S01测点数据前10期的滤波结果, 见图2。 监测数据由第2期开始收敛, 协方差逐渐趋向于0。卡尔曼滤波的结果与原始数据相差不大, 残差的绝对值最大不超过0.3 mm, 说明初始状态的选取比较合理。滤波后的曲线更加平滑, 能够更好地反映历史建筑的沉降趋势。
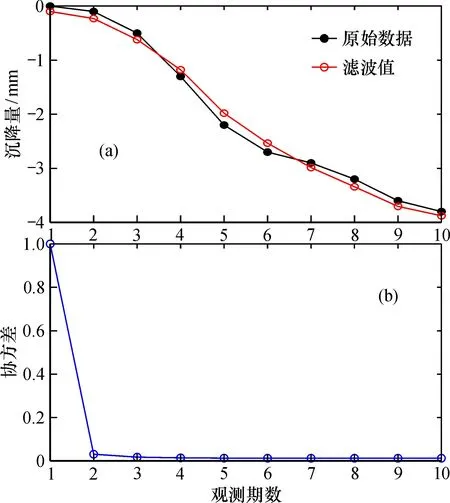
图2 卡尔曼滤波结果(a)和滤波协方差(b)
2.2 沉降预测及对比分析
在沉降预测过程中, 根据前10期原始观测数据, 将观测时间作为自变量, 不均匀沉降作为因变量, 建立传统的多项式回归分析模型, 并运用该模型预测后5期的不均匀沉降; 基于前10期的卡尔曼滤波数据, 用多项式回归模型建模, 然后利用该模型得到后5期的预测结果; 根据前10期的滤波结果, 用卡尔曼滤波模型对后5期的不均匀沉降进行预测。将3种方法所得的预测结果与实际观测值进行对比, 并进行残差分析, 其结果见表1。
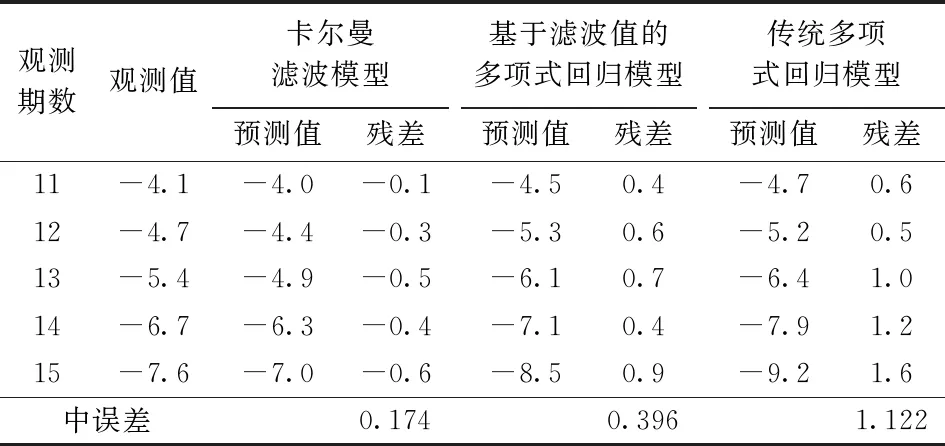
表1 不同模型的预测结果对比
3种方法所得到的预测值与实际观测值残差的绝对值均小于2 mm, 说明这几种方法的预测结果和实际观测值较为吻合, 都适用于历史建筑不均匀沉降的预测, 但是卡尔曼滤波预测值的中误差只有0.174 mm, 预测精度最高。相比之下, 传统多项式回归分析模型的预测误差较大, 其预测值的中误差为1.122 mm, 明显大于另外两种方法。同时, 基于卡尔曼滤波值的多项式回归模型由于剔除了建模数据中的部分随机干扰, 其预测精度与传统的多项式回归模型相比有所提高, 但是没有达到卡尔曼滤波模型的预测精度。
根据以上分析, 卡尔曼滤波模型相比于多项式回归模型, 能够更好地预测历史建筑的不均匀沉降。在预测过程中, 多项式回归模型每一次预测更新都需要将前几期的数据重新整合建模。相比之下, 卡尔曼滤波模型不需要储存大量数据, 只需要新一期的监测数据即可进行预测, 大大节省了时间和成本, 因此卡尔曼滤波模型更适合于实际工程。
3 结束语
(1)与传统的多项式回归模型相比, 卡尔曼滤波模型能够更好地预测历史建筑的不均匀沉降。它可以实时、 快速地处理大量监测数据, 提高了预测效率, 有效运用于实际工程。
(2)基于卡尔曼滤波的多项式回归模型可以对初始的监测数据进行修正, 剔除数据中部分随机扰动的影响, 一定程度上提高了多项式回归模型的预测精度。
(3)在实际应用中, 需要考虑卡尔曼滤波的收敛速度,且滤波初值的选取对滤波效果的影响较大, 其预测值可能带有模型误差, 需要进一步研究。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
铁道通信信号(2019年11期)2019-05-21
测控技术(2018年12期)2018-11-25
北京航空航天大学学报(2017年9期)2017-12-18
中国医学装备(2016年6期)2016-12-01
电源技术(2016年9期)2016-02-27
燕山大学学报(2015年4期)2015-12-25
振动工程学报(2015年1期)2015-03-01
全球定位系统(2015年4期)2015-02-28
电测与仪表(2014年3期)2014-04-04
