
核心舱机械臂托举航天员顺利完成出舱任务
2021-08-19 13:32高晓雷张宇郭睿北京空间飞行器总体设计部
国际太空 2021年7期
高晓雷 张宇 郭睿(北京空间飞行器总体设计部)

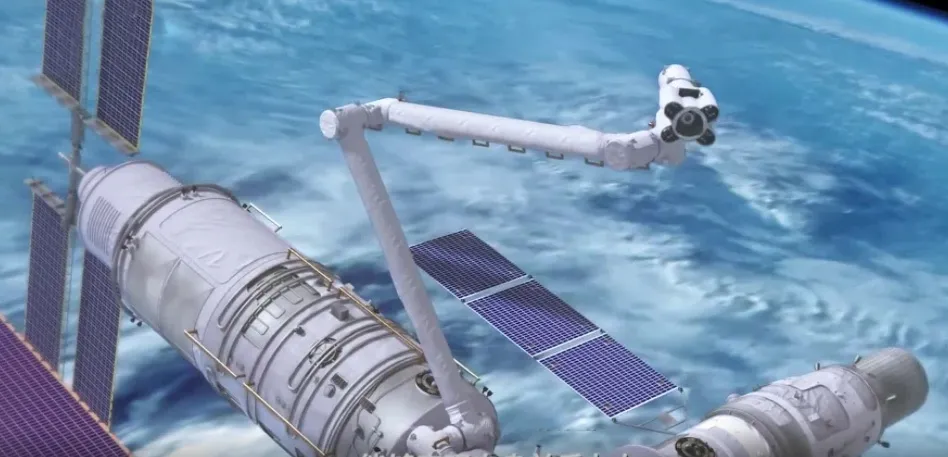
2021年7月4日,神舟十二号航天员刘伯明、汤洪波顺利出舱,雄伟有力的空间站核心舱机械臂首次托举航天员刘伯明到指定位置,圆满完成出舱操作,抬升天和核心舱舱外全景相机的位置,并验证了机械臂的大范围转移能力,在刚刚迎来建党百年华诞之际,完成了我国空间站工程建造任务的又一壮举。
此次出舱活动,圆满完成了舱外活动相关设备组装、全景相机抬升等任务,首次检验了航天员与机械臂协同工作的能力及出舱活动相关支持设备的可靠性与安全性,为空间站后续出舱活动的顺利实施奠定了重要基础。
攻关崭新领域,展现中国力量
空间站核心舱机械臂由中国空间技术研究院抓总研制,是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统,主要承担舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护等八大类在轨任务。其中核心舱机械臂展开长度为10.2m,最多能承载25t的质量,是中国空间站型号任务中的“大力士”。
空间站机械臂是我国航天发展的新领域之一,是空间站组装、建造以及航天员舱外操作的重要装备。研制过程中在关键技术、原材料选用、制造工艺、适应空间站环境的长寿命设计等方面均取得了巨大的突破和创新。空间站机械臂并非单一的专业产品,而是融合了机、电、热、控制、光学等多个专业。
空间站机械臂是一款模仿人类手臂的七自由度机械臂,核心舱机械臂的肩部设置了3个关节、肘部设置了一个关节、腕部设置了3个关节,一共7个关节。每一个关节对应一个自由度,就如同人的手臂一般,具有七自由度的活动能力,通过各个关节的旋转,能够实现自身前后左右任意角度与位置的抓取和操作,真实地模拟了人类手臂的灵活运动,为航天员顺利开展出舱任务提供了强有力的保证。
核心舱机械臂具备七自由度活动能力
国产核心部件,引领中国创新
空间站机械臂研制团队践行自立自强的创新精神,全面跨越国际技术封锁,在国内首次提出并实现了可爬行、可维护的大型七自由度全对称构型空间机械臂系统方案。
为扩大任务触及范围,空间站核心舱机械臂具备“爬行”功能,由于核心舱机械臂采用了“肩3+肘1+腕3”的关节配置方案,肩部和腕部关节配置相同,意味着机械臂两端活动功能一致。同时肩部与腕部各安装了一个末端执行器,作为机器臂的触手,末端执行器可以对接舱体表面安装的目标适配器,机械臂通过末端执行器与目标适配器对接与分离,同时配合各关节的联合运动,就能实现在舱体上的爬行转移。

机械臂大小臂组合试验
空间站核心舱机械臂是我国首个可长期在太空轨道运行的机械臂,它能真实模拟人手臂的灵活转动,通过旋转结构,能在前后左右的任何角度和部位抓取物体,是我国首次实现大型空间机械臂的工程研制产品。
中国空间站核心舱机械臂的研制攻关历程,是中国航天科技发展求索创新之路的一个缩影。在空间站机械臂研制团队的努力下,全部核心部件实现国产化,并形成了多项国家空间机器人行业标准,引领空间智能装备的中国制造之路。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
小哥白尼(神奇星球)(2022年5期)2022-08-15
军事文摘(2022年10期)2022-06-15
作文大王·低年级(2022年4期)2022-04-23
中国典型病例大全(2022年9期)2022-04-19
机械科学与技术(2022年2期)2022-03-30
科技风(2021年10期)2021-04-18
武术研究(2017年6期)2017-07-20
现代仪器与医疗(2017年3期)2017-07-06
