
运载火箭姿控系统组件化模型库设计与应用
2021-08-17 07:57于一帆陶久亮
宇航计测技术 2021年2期
于一帆 陶久亮 王 晨 马 成 彭 博
(北京宇航系统工程研究所,北京 100076)
1 引 言
运载火箭飞行性能仿真是以火箭全系统为研究对象,对飞行全过程各项综合性能进行分析与评估的活动。开展运载火箭飞行性能仿真,能够对火箭在多种发射条件、多种工况、多种偏差和典型故障下的飞行过程进行预示,评估环境条件对火箭发射的影响,为改进设计和制定故障预案提供支持,对提高型号可靠性、确保发射成功具有重要意义。而姿控系统仿真模型作为运载火箭飞行性能仿真系统中的重要组成部分,用于实现仿真系统中控制火箭稳定飞行和姿控系统典型故障仿真的功能,是必不可少的关键分系统模型之一。其建模质量也严重关系到整个仿真系统的精确度和可靠性。
目前,我国运载火箭发射任务密集,航天器种类繁多。在飞行仿真系统建模中,由于目前不同型号的姿控系统差异性大、专用型强、复用性差,导致在系统设计方案、仿真需求有新的改动时,不得不重新开发,原有经过验证的仿真模型代码也无法得到复用,这不仅延长了开发周期,也导致了模型可信度的降低。
为了提高模型可重用性,实现对模型资源和模型验证成果的积累,本文提出了面向运载火箭飞行性能仿真的姿控系统通用仿真建模技术,通过合理划分模型功能,将姿控模型中可重用的部分进行提炼固化形成可复用的基础建模组件,将模型中差异性较大的部分通过参数配置的形式和对基础建模组件进行拼装搭建的形式进行重组和改型,实现针对不同型号和不同仿真需求的姿控系统仿真模型快速构建。
2 姿控系统仿真模型组件化设计
2.1 组件化模型设计方法
组件化模型设计方法将仿真模型建模重塑为一个模型组装的过程,通过参数配置和模型拼装的过程来进行姿控系统仿真模型开发。不同运载火箭型号的姿控系统架构基本相同,控制算法也有共性之处,本文采用组件化建模的思路进行运载火箭姿控系统仿真模型设计,形成姿控系统组件化仿真模型库,尽量减少建模过程中的重复工作。组件化模型设计方法的特点总结如下:
(1)系统模型的分层架构。系统模型按照功能模型和单机模型分层分类,易于用户理解整个仿真系统的构成。
(2)模型的参数化设计。将模型的底层算法逻辑和参数相分离,用户可通过界面参数配置即可实现不同的功能。极大提高了模型的复用率和用户的建模销量。
(3)模型的并行开发。组件化模型设计将系统的功能模块按照较细的颗粒度进行划分,可实现不同功能模块并行开发,提升了功能模块的优化空间。
(4)模型的高可靠性。模型库中的每个功能模块都能进行详细的校验,与商软模块进行精度和建模效率对比,一定程度上提高了模型库中功能模块的可靠性。
姿控系统仿真模型的组件化设计首先对姿控系统进行梳理,按照不同运载火箭姿控系统的特征进行归类,然后对这些归类后的特征进行抽象,抽象出不同的单机模型和算法模型,并对这些组件化模型进行建模、开发和验证。再依据最初的分类原则,基于组件化模型进行装配,最终实现运作火箭姿控系统的仿真模型。由此可见,姿控系统组件化模型设计的建模过程包括组件化设计、组件化开发、组件化装配、组件参数配置和模型库存储这五个环节。其中组件化设计是整个建模方法的关键环节,它是整个建模过程的基础,关乎模型库的易用性和精度。
2.2 姿控系统仿真模型组件化接口设计
针对姿控系统开展组件化建模工作,首先需要制订仿真建模规范并开发组件化模型接口,从而实现对多个仿真模型组件模块的统一封装、管理和仿真驱动运行。运载火箭姿态控制仿真系统是典型的连续离散混合系统仿真,有连续传递函数、插值算法等连续仿真,也有校正网络等离散仿真,系统内部状态变化是连续的,飞行时序、飞行故障等事件的发生是离散的。
对于运载火箭姿态控制系统仿真模型而言,可以将其归纳为给定一组的输入,经过内部的状态运算,然后得到一组输出,用统一的数学表述可写为:
(1)
其中,各参量的定义为:T
——系统的仿真时间;U
——系统输入;Y
——系统输出;X
——系统的内部状态;F
——状态的变化规律;G
——输出的变化规律。针对连续离散混合仿真系统的特点,本文设计了一种基于消息驱动的连续离散混合系统组件模型建模方法。将仿真模型离散状态的转移以消息形式加以描述。在输入、输出、状态变量这三个组件接口的基础上,增加消息和事件接口。其中消息是模型发出和接收的信号信息,事件以回调函数形式实现,定义了模型如何响应接收到的消息。
依据上述理论,设计形成姿控系统组件化模型接口描述规范如图1所示。每个组件模型包括5个接口:输入参数(Input)、输出参数(Output)、状态参数(State)、事件响应接口(Event)、消息(Message)。其中Input、Output、State的信息类型均为参数列表,每个组件模型需明确参数个数、每个参数的描述及数据类型等。这些是组件模型的个性信息。Message是指模型发出和接收的信号信息,包括模型主动发出,系统响应和转发的消息,还包括系统和其它模型发出,本模型响应的消息。Event以回调函数形式实现,定义了模型如何响应接收到的消息。

图1 模型描述规范
以姿态角偏差计算模型为例,按照组件模型规范进行建模,模型输入参数为:俯仰角、偏航角、滚转角、俯仰角指令、偏航角指令和滚转角指令,模型输出参数为:俯仰角偏差、偏航角偏差和滚转角偏差,模型状态参数为0,模型消息均为接收级间消息,事件响应为接收到分离消息后,切换至相应飞行段的姿态角指令。模型库中其它单机模型和算法模型均遵循此模型规范,便于模型的重用和扩展,提高了模型通用性。
2.3 姿控系统仿真模型库设计
一般来说,运载火箭的姿态控制系统主要具有以下功能:
(1)控制功能:根据弹道设计的要求,控制运载火箭的姿态,实现弹道的转弯、变轨等飞行程序;根据制导系统的要求,控制运载火箭的姿态,改变推力矢量方向,实现横、法向导引控制;
(2)姿态稳定功能:克服作用在箭体上的各种干扰的影响,使运载火箭的姿态稳定在允许范围内,确保火箭稳定飞行;
(3)调姿定向功能:按照发射任务的要求,将有效载荷的姿态调整到指定的方向上。
常见的运载火箭姿控系统一般包括敏感器件、执行机构、箭载计算机等部件,另外还有增益调度、连续/离散传递函数、坐标转换、控制方程等算法。因此,按照组件化建模的思想,姿控系统基础模型库可分为单机模型和算法模型两大类,顶层的单机模型可由底层的算法模型封装而成,可直接调用封装好的单机模型进行仿真,也可根据型号特点,采用基础算法模型封装型号特有的单机模型,以达到快速响应型号任务的目的。姿控系统仿真模型库的架构如图2所示。
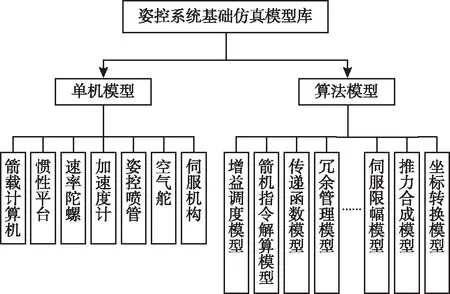
图2 姿控系统基础仿真模型库架构图
由图2可知,常用的算法模型可包括:增益调度模型、箭机指令解算模型、连续/离散传递函数模型、冗余管理模型、伺服限幅模型、推力合成模型、坐标转换模型等。以连续传递函数算法模型为例,该模块通过读取分子分母系数文件,得到不同的传递函数数学模型,并将其转化成能观测标准形式,采用四阶龙格库塔积分算法求解能观测标准型方程得到传递函数的输出。用户调用传递函数模型,在界面配置传递函数的分子分母系数和传函阶次,得到不同阶次的传递函数模型,输入信号,计算得到相应的输出。同时,根据运载火箭伺服系统的组成和构型,可将配置好的连续传递函数算法模型组装成伺服机构单机模型,被姿控系统直接调用,或具备相同伺服构型的其它运载火箭仿真系统调用。
常用的单机模型包括:箭载计算机模型、惯性平台模型、速率陀螺模型、加速度计模型、姿控喷管模型、空气舵模型、伺服机构模型等。以箭载计算机模型为例,该模型首先对姿态角偏差、姿态角速度、横法向加速度等输入信号进行校正滤波并进行控制解算,因此,箭载计算机模型可由离散传递函数模型、箭机指令解算模型和增益调度模型组成。
3 组件化模型库验证
开发出姿控系统基础仿真模型库之后,需要对模型仿真精度进行验证,在相同的输入条件下,将模型库中各个组件仿真模型分别与商业软件Matlab/Simulink模型进行精度对比,得到两者仿真结果对比验证的误差情况如表1所示。
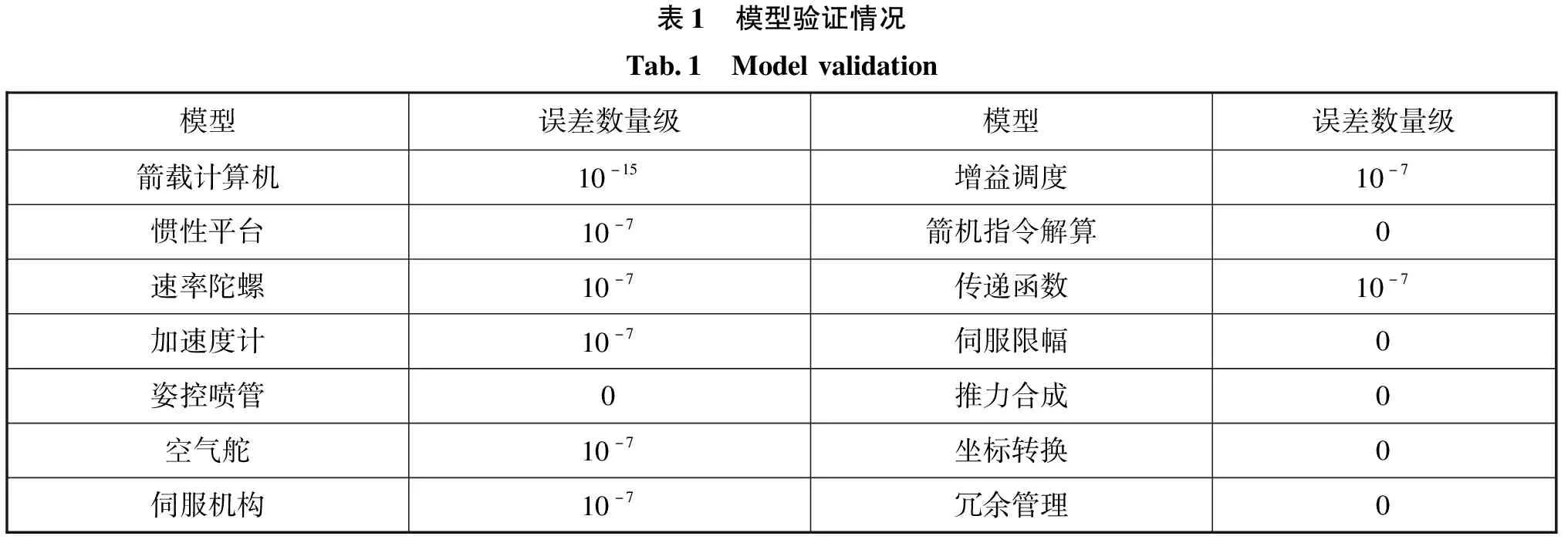
表1 模型验证情况Tab.1 Modelvalidation模型误差数量级模型误差数量级箭载计算机10-15增益调度10-7惯性平台10-7箭机指令解算0速率陀螺10-7传递函数10-7加速度计10-7伺服限幅0姿控喷管0推力合成0空气舵10-7坐标转换0伺服机构10-7冗余管理0
由表1可知,模型库中的算法模型和单机模型与Simulink模型的仿真误差均小于10数量级。不仅如此,采用模型库搭建开环控制系统,在相同输入条件下与Simulink模型输出结果进行对比,仿真结果之间的误差达到了10数量级。验证了姿控系统基础模型库的仿真正确性和精确性。
4 仿真应用案例
4.1 应用案例背景介绍
以某型运载火箭飞行性能仿真为例,该型号火箭姿控系统需根据弹道设计的要求,控制运载火箭的姿态,实现弹道的转弯、变轨等飞行程序;根据制导系统的要求,控制运载火箭的姿态,改变推力矢量方向,实现横、法向导引控制;根据载荷设计的要求,控制运载火箭的姿态,改变飞行轨迹,实现飞行载荷控制。采用姿控系统模型库搭建运载火箭姿控系统仿真模型如图3所示。
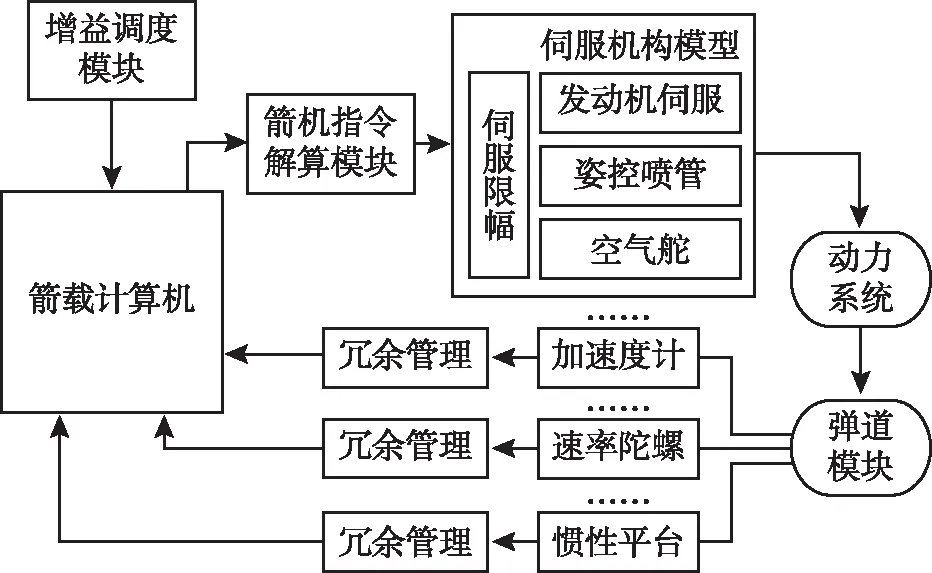
图3 某型火箭三冗余姿控系统仿真模型体系
4.2 仿真配置与结果分析
组件化建模方法使得模型在很大程度上实现了参数化,搭建仿真模型之后,对模型关键参数,如传递函数分子分母系数、飞行段切换消息、动静态增益等进行配置。将运载火箭飞行性能仿真系统的仿真步长设置为0.005s,控制系统仿真模型的解算周期设置为0.01s,仿真时间设置为170s。为仿真模型配置相关偏差项,如大气密度偏差、某发动机安装角偏差、结构质量偏差以及法向力系数偏差等,以验证控制系统的性能,所考虑的偏差项及取值如表2所示。
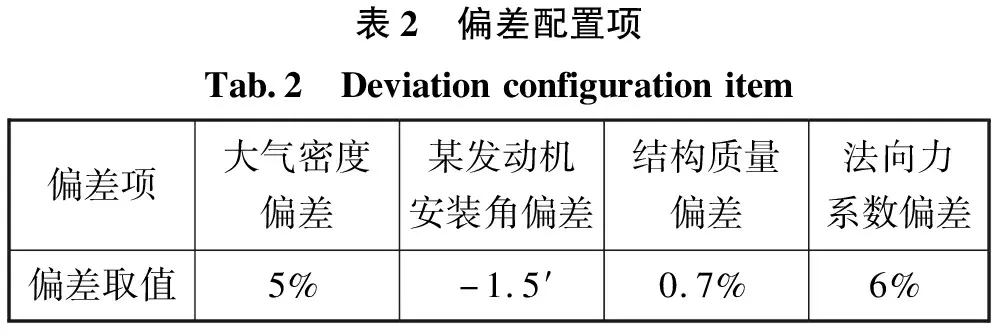
表2 偏差配置项Tab.2 Deviationconfigurationitem偏差项大气密度偏差某发动机安装角偏差结构质量偏差法向力系数偏差偏差取值5%-1.5′0.7%6%
运行某型号运载火箭飞行性能仿真系统,俯仰角偏差和偏航角偏差的输出结果如图4和图5所示。由图可知,在给定多项偏差的情况下,火箭姿态失调角都在允许范围内,说明在姿控系统的控制下,火箭按照姿态程序角飞行,控制效果良好,仿真结果也证明了姿控系统组件化模型库的正确性和可用性。

图4 俯仰角偏差仿真结果(deg)
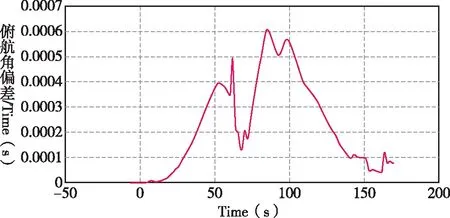
图5 偏航角偏差仿真结果(deg)
最后,针对该运载火箭型号姿控系统仿真建模工作,将C++自编程、Matlab/Simulink建模和基础模型库建模三种建模方式进行对比,分别就建模时间、自编程比例和建模特点进行比较,如表3所示。
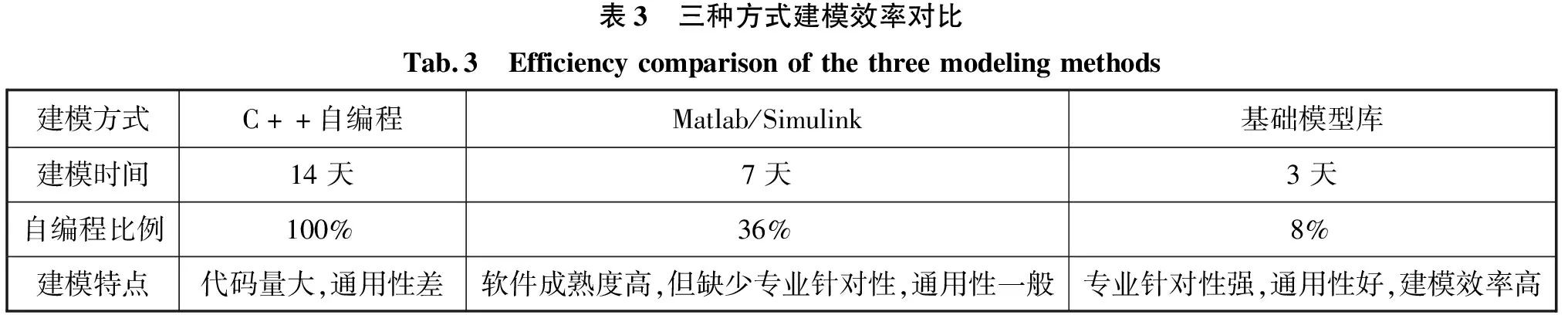
表3 三种方式建模效率对比Tab.3 Efficiencycomparisonofthethreemodelingmethods建模方式C++自编程Matlab/Simulink基础模型库建模时间14天7天3天自编程比例100%36%8%建模特点代码量大,通用性差软件成熟度高,但缺少专业针对性,通用性一般专业针对性强,通用性好,建模效率高
从表3可知,由于姿控系统模型库的开发以我国多个运载火箭型号仿真经验为工程基础,以组件化的建模思想为技术基础,因此,相对于其它建模方式来说,基础模型库具有专业针对性强,通用性好,建模效率高等优点,更适用于我国研制的运载火箭飞行综合性能仿真。
5 结束语
本文通过组件化建模的设计方法,构建了运载火箭姿控系统组件化仿真模型库,基于此模型库搭建不同型号的姿控系统仿真模型,在提高建模效率的同时又能保证仿真可信度,为运载火箭系统级仿真建模起到了示范性作用,并且本文所提到的方法具备向其他领域模型体系设计推广的潜力。
