
基于IP的遥测网传输综述
2021-08-17 07:29罗煜缤周广铭
宇航计测技术 2021年2期
罗煜缤 李 洪 周广铭 路 娟
(1.北京宇航系统工程研究所,北京 100076;2.中国航天科技集团有限公司,北京 100048)
1 引 言
在上世纪后期,以脉冲编码调制(Pulse Code Modulation, PCM)帧格式为基础的包交换网络凭借其优异的性能及可靠性,已经在地面遥测系统服役了数十年之久。但随着遥测数据体量的不断增大,传统基于PCM帧的包交换网络性能逐渐趋于饱和,无法满足未来的发展需求。而在民用领域,光纤等传输介质和IP网络技术的普及,给地面遥测网的升级换代提供了机遇。于是,早在2006年之前,美国靶场司令委员会(Range Commanders Council, RCC)的电信时序工程组(Telecommunications and Timing Group, TTG)就开始致力于制订一个基于IP协议的串行遥测信号传输的标准,以填补美国靶场仪器组(Inter-Range Instrumentation Group, IRIG)IRIG 106标准第四章中关于该领域相关描述的不足;在2007年时,RCC TTG发布了第一版基于IP的遥测网传输(Telemetry Transmission over Internet Protocol, TMoIP)标准IRIG 218-07;后经数次修订与升级,发布了IRIG 218-10、IRIG 218-P和IRIG 218-18等多个版本;2020年初发布了最新升级的IRIG 218-20,使得TMoIP技术愈发完善。
使用TMoIP技术可以带来以下几个优势:IP技术的普及和设备的不断更新换代,使得网络性能不断提升的同时费用开销却在不断降低;IP技术的从业人员及相关企业很多,其能提供丰富的技术支持,避免出现专业技术人员稀缺的情况;IP技术提供了无连接的传输方式,在方便网络配置的同时提供了多播传输的能力,从而节省传输带宽;利用IP技术使得PCM包能够轻松地在电脑等设备上存储和展示。
目前国际上对TMoIP技术的研究仍处于探索和完善阶段,有一些厂商例如GDP Space System公司已经研发出了完整的配套设备,例如网关、PCM-IP转换器、交换机/路由器等,且RCC也在根据厂商的反馈不断改进相关标准。反观国内目前还没有与此技术相关的论文及研究成果,于是本文在总结和梳理国外研究成果的基础上,对该技术的概念与范畴、发展历程及技术实现等方面进行了详细阐述,希望能对国内研究者发展下一代地面遥测网提供一定的参考。
2 TMoIP的概念与范畴
TMoIP主要解决的是地面包交换网络使用IP技术传输遥测数据时所遇到的问题,其服务的主体是地面遥测网,例如各遥测地面站之间的通信或遥测地面站与数据存储中心或数据处理中心之间的通信。图1展现了一个使用TMoIP技术的简单场景:遥测设备产生一个PCM包流,通过网络处理器封装为TMoIP包流,然后通过地面遥测网路由交换到达收端处的网络处理器对包进行拆解,转化为PCM包流再输出到收端处的遥测设备。从该流程中可以看出,整个地面遥测网的交换路由过程使用的都是TMoIP包,只需在现有IP设备上对软件稍作更改即可适配,无需专门研发新设备,因此整个框图中的核心是网络处理器,其功能是实现PCM包与TMoIP包的相互转化,这也是TMoIP标准所解决的关键问题。

图1 TMoIP遥测网功能框图
随着对TMoIP技术的深入研究,网络场景的刻画也更加复杂。在IRIG 218-18中引入了一些新功能,进而得到改进后的TMoIP遥测网功能框图,如图2所示:输入端增加了比特同步捕捉器专门用于比特同步、增加了接收机直接接收其他TMoIP设备输出的包;输出端增加了最佳源选择器挑选出想要的包以保证实时性和准确性、增加软件解调器用于直接对包进行解析并在显示设备上输出、增加IP解密器对有需要解密的包进行解密。由此也可以看出TMoIP技术的引入为地面遥测网功能的扩展提供了更多的可能性。

图2 TMoIP遥测网功能框图改进
在上面的介绍中提到,TMoIP技术所解决的关键问题是建立PCM包与TMoIP包的相互转化机制,其本质是IP技术的升级,除引入TMoIP控制字以外使用的都是现有的成熟技术。IRIG 218-20标准中的TMoIP控制字位于OSI七层模型中的表示层,位于TCP/IP五层模型中的应用层。图3给出了TMoIP技术用TCP/IP五层模型表示的框图:物理层和数据链路层按Ethernet(IEEE 802.3)协议的规定进行设置、网络层使用IP协议、传输层使用UDP协议、应用层使用TMoIP协议。对于各层协议的选取理由和技术细节将会在后面进行介绍。
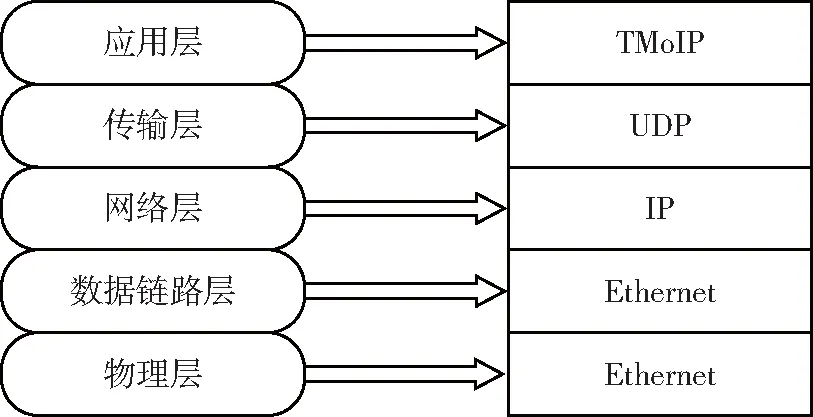
图3 TMoIP的五层模型表示
3 TMoIP的发展历程
TMoIP技术从诞生走向完善至今已历经了十余年。首先来看标准的升级历程,前面已经提到,最早于2006年之前RCC TTG就着手于TMoIP标准的制订,并在2006年发布了第一个初稿;2007年,RCC TTG发布了第一版基于IP的遥测网传输标准IRIG 218-07,重点阐述了TMoIP技术的概况和OSI七层模型中各层协议的具体构筑,包括各层帧头的字段类型与描述以及设定的依据;2010年RCC TTG发布了IRIG 218-07的升级版IRIG 218-10,增加了TMoIP技术管理方面的内容,包括QoS保证、网络性能评估、IPV6及多播支持等;2016年第52届国际遥测年会(International Telemetering Conference, ITC)上探讨了IRIG 218-10的升级事宜,重点是增强实时传输的能力;2017年在第53届ITC上发布了IRIG 218-10的升级内容,即IRIG 218-18,删除了不必要的Alarm字段,增加了负载类型、帧同步状态和时间戳字段,用于区分业务、保障传输的实时性以及PCM时钟信号的恢复;2020年,RCC TTG发布了最新的IRIG 218-20标准,在IRIG 218-18的基础上删去了长度字段,增加了子帧同步状态和时间戳参考源类型的字段,进一步增强了实用性;IRIG 218系列中间还有一个版本叫做IRIG 218-P,这里的P是单词Proprietary的缩写,该标准主要由厂家为特定应用所设计。
接下来介绍研究人员为传播和改善TMoIP所做的努力。2007年在第43届ITC上,Brian等人对TMoIP标准的初稿进行了梳理和重点描述;2008年在第44届ITC上,Kenney等人对TMoIP具体实现中可能涉及的关键技术点进行了分析和阐述;2009年在第45届ITC上,Andy对传统架构中使用异步传输模式(Asynchronous Transfer Mode, ATM)的网络转换为使用TMoIP技术的以太网给出了具体的方法及建议;2013年在第49届ITC上,Bob在应用层面提出了TMoIP的一个全新架构,为TMoIP的具体应用实施提供了参考;2014年在第50届ITC上,GDP Space Systems公司的Richard从工程应用的层面为工程师们提供了TMoIP的技术手册,包括其优点、问题、解决方案及未来的发展趋势等;2015年在第51届ITC上,Bob探讨了下一代TMoIP可能具有的特点:流监测、错误恢复、元数据、存储媒介管理、应用流量的瞬时分配等;2017年在第53届ITC上,Thom根据工程实践的经验提出了IRIG 218-10改进后的一种形式,主要内容是增加了时间戳及帧同步状态,提高网络流量监测及时钟再生的能力,这刚好与IRIG 218-18的主题思想不谋而合;2018年在第54届ITC上,GDP Space System公司的Richard给出了TMoIP从IPv4迁移到IPv6版本下会遇到问题及解决方案。
总的来看,TMoIP适用的场景在不断扩大且趋于多元化,其理论也在为适配各种不同的应用场景而日趋完善。IP技术的引入为传统地面遥测网增添了许多可能性,许多不可能完成的功能也将得以实现,例如将地面遥测网与互联网通过网关连通,从而实现遥测图像的低延迟实时转播。随着IP技术、传输媒介及以太网技术的不断发展,TMoIP的性能将不断地提升,适用场景也将不断地扩大。
4 TMoIP的技术实现
TMoIP的技术实现将以最新的IRIG 218-20标准作为参考,主要是对各层帧头的构成及技术要点进行描述。按照TCP/IP五层模型可分为五个部分:物理层、数据链路层、网络层、传输层及应用层,其中遥测终端只有物理层,用于PCM信号的输入与输出。对于遥测终端产生的PCM信号,在传输到网络处理器后,从应用层的接口进入,经过五层模型自上而下的封装,最终由物理层输出TMoIP信号;而通过地面遥测网路由交换到达网络处理器的TMoIP信号,经过物理层从下到上逐层按照协议解析包,最后从应用层输出带时钟的PCM信号,其信号流动方向的直观展示参见图4。下面将自上而下分别阐述每一层的功能、构造及技术要点。
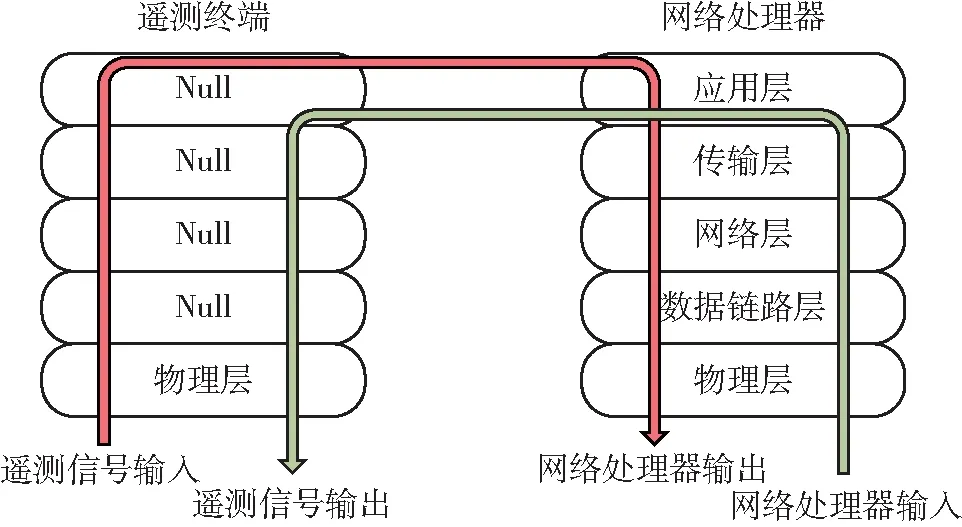
图4 TCP/IP五层模型信号流动示意图
4.1 应用层
应用层的主要功能是将外部接口接收到的串行遥测数据流转化为代表原始数据的数据包格式,并为这个原始数据包增加一个TMoIP控制字;或者是从下层接口处接收到的包拆解掉TMoIP控制字,重新生成时钟信号,进而将包流转化为串行遥测数据流。应用层的控制字组成如表1所示,直观构造参见图5。
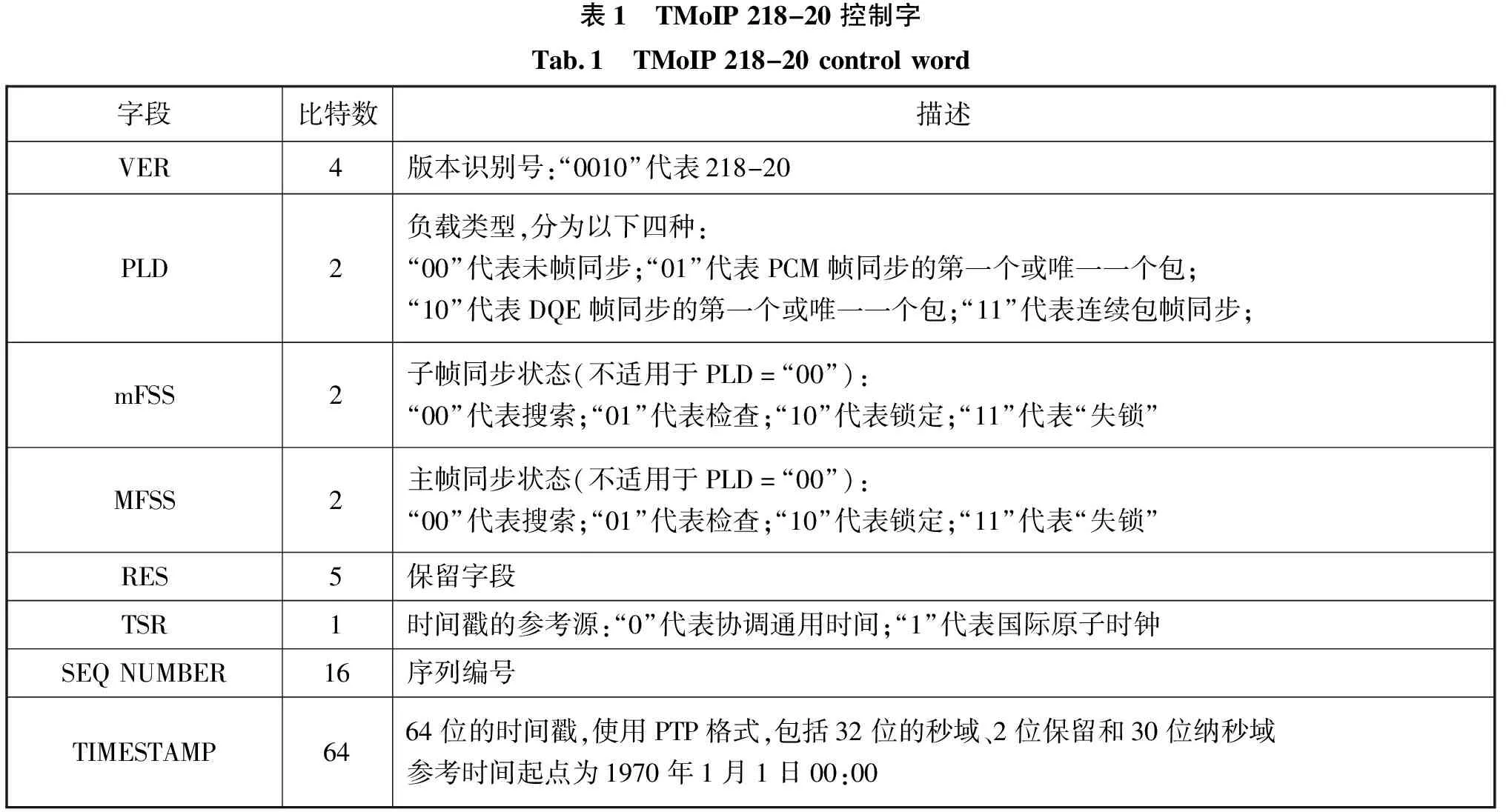
表1 TMoIP218-20控制字Tab.1 TMoIP218-20controlword字段比特数描述VER4版本识别号:“0010”代表218-20PLD2负载类型,分为以下四种:“00”代表未帧同步;“01”代表PCM帧同步的第一个或唯一一个包;“10”代表DQE帧同步的第一个或唯一一个包;“11”代表连续包帧同步;mFSS2子帧同步状态(不适用于PLD=“00”):“00”代表搜索;“01”代表检查;“10”代表锁定;“11”代表“失锁”MFSS2主帧同步状态(不适用于PLD=“00”):“00”代表搜索;“01”代表检查;“10”代表锁定;“11”代表“失锁”RES5保留字段TSR1时间戳的参考源:“0”代表协调通用时间;“1”代表国际原子时钟SEQNUMBER16序列编号TIMESTAMP6464位的时间戳,使用PTP格式,包括32位的秒域、2位保留和30位纳秒域参考时间起点为1970年1月1日00:00

图5 TMoIP 218-20控制字
由于时间戳的引入,相比于IRIG 218-10多了8个字节,而之所以加入时间戳主要是起到以下两方面的作用:一是用于时钟恢复,由于PCM数据流是包含时钟信息的,那么在TMoIP包转化为PCM信号的时候,需要再次生成时钟信号,通过计算流量来生成时钟是不稳定的,而使用时间戳则能很好地解决这个问题;二是用于定时发送,在地面遥测网络中,由于组包耗时和不同路径传输耗时的不同,会导致接收端接收到的多个包出现不同相移的情况,因此会根据组包耗时和路径传输耗时之和的最大值来确定一个统一时延,从而保证接收端收到的包相位一致。
在应用层组包方面还有一个需要重点考虑的因素,那就是包大小。如果组成较小的包进行发送,就会导致较高的帧头开销,但是换来了低延迟、低时延抖动以及高采样率的时钟恢复;如果组成较大的包,会提高数据的传输效率,但在延迟和时延抖动方面不够理想。综上,在包大小的选取方面需要根据应用需求进行折中考虑。
4.2 传输层
传输层的功能是增加端到端的通信控制来保证数据传输的可靠性。在TCP/IP协议中有两种选择,分别是TCP和UDP,在TMoIP中使用的是UDP协议。之所以使用UDP是因为TCP是一种需要事先建立连接的协议,而UDP是一种无连接的传输协议,不需要经过事先握手。虽然UDP无法通过重传来保证传输的可靠性,但是它的好处是只需要单向链路即可通信;较低的时延和较小的帧头开销;支持多播,从而提升带宽的利用效率。其中低时延特性带来的实时性保障正是在遥测系统中所需要的,相比之下TCP的重传机制消耗了更多的资源并且带来了更多的时延。不过在IRIG 218-20中也提到未来可能会因为某些场景的加入而引入TCP。在TMoIP中规定的UDP帧头定义如表2所示。
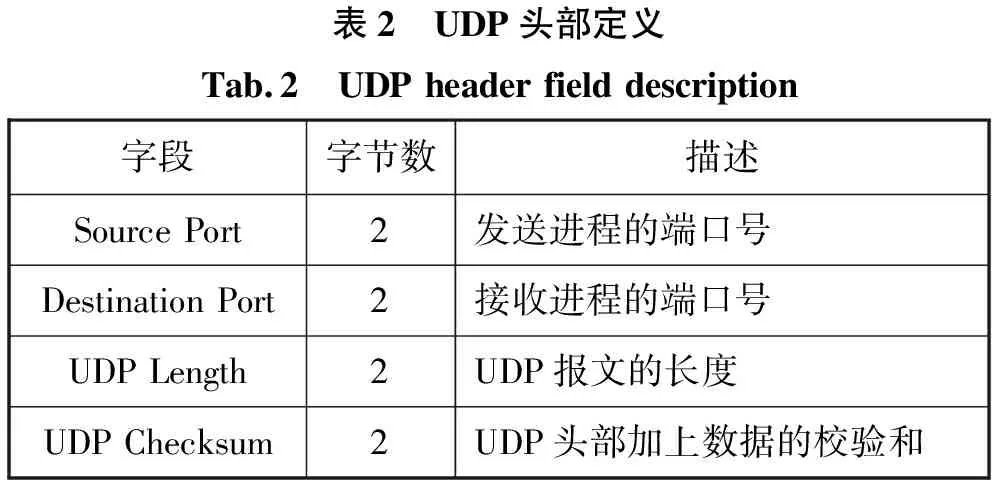
表2 UDP头部定义Tab.2 UDPheaderfielddescription字段字节数描述SourcePort2发送进程的端口号DestinationPort2接收进程的端口号UDPLength2UDP报文的长度UDPChecksum2UDP头部加上数据的校验和
4.3 网络层
网络层的功能是提供路由能力,在TMoIP 218-20中规定使用的是IPV4协议,根据源节点和目的节点的IP地址,网络中的路由器进行中继转发从而形成一条传输路径,并且根据目的节点IP地址的不同还可以实现单播、多播和广播的功能,在TMoIP 218-20中支持单播和多播。其IP帧头定义如表3所示。
目前TMoIP 218-20使用的仍是较老的IPV4协议,因为现有的商用设备大多仅支持IPV4。但随着入网设备数量的增加、IPV6协议的普及以及部分地面遥测网络与互联网的逐步互通,现在已经将TMoIP升级至支持IPV6的相关事项提上了日程,前面发展进程中也提到目前GDP Space System公司正在研发支持IPV6的TMoIP设备。
IPV6相比IPV4主要有以下几个方面的优势:更大的地址空间从而容纳更多的入网设备;不再需要DHCP以及NAT,从而减少设备复杂度;虽然帧头变大了,可是字段数目变少了,使帧头更加简洁;更好地支持多播功能;使用IPV6中特有的流动标签字段实现更简洁更高效的路由,使用流量分级字段实现更细的QoS支持;更加灵活且具有可扩展性,可通过扩展帧头来增加内置身份认证和隐私保护支持。

表3 IP头部定义Tab.3 IPheaderfielddescription字段字节数描述Version1比特0-3为版本号HeaderLength比特4-7为IP头长度TypeofService1对于特定流量设定QoS等级TotalLength2IP包的总长度ID216位的IDFlagsFragmentOffset2比特0-3为标记比特4-15为分段偏移TimetoLive1一个包在被路由器销毁之前在网络中的最大跳数ProtocolType1被IADA注册表定义的协议类型HeaderChecksum2IP头循环冗余校验SourceAddress4源IP地址DestinationAddress4目的IP地址
4.4 数据链路层
数据链路层的功能是对从网络层接收到的包进行再封装,从而实现对等层的可靠传输,包括差错检测和流量控制。在TMoIP 218-20中规定使用的是以太网协议(IEEE 802.3),其字段构成如表4所示。
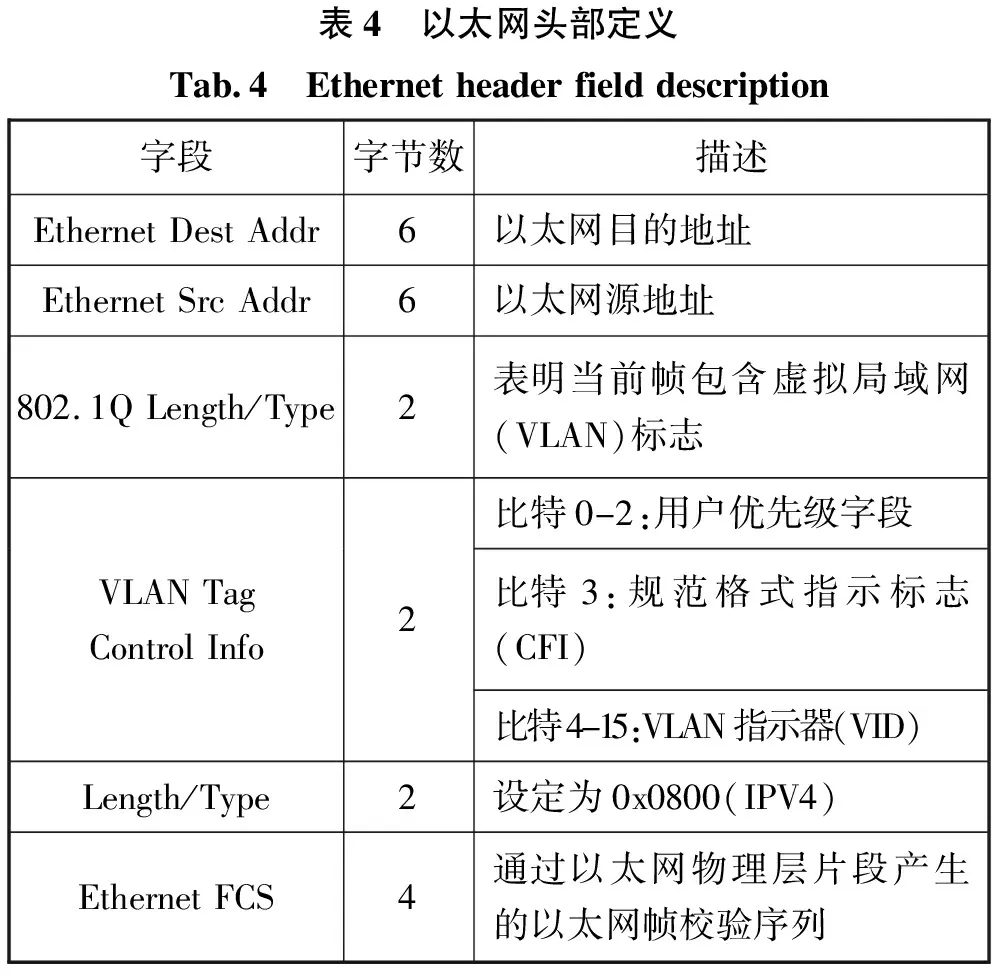
表4 以太网头部定义Tab.4 Ethernetheaderfielddescription字段字节数描述EthernetDestAddr6以太网目的地址EthernetSrcAddr6以太网源地址802.1QLength/Type2表明当前帧包含虚拟局域网(VLAN)标志VLANTagControlInfo2比特0-2:用户优先级字段比特3:规范格式指示标志(CFI)比特4-15:VLAN指示器(VID)Length/Type2设定为0x0800(IPV4)EthernetFCS4通过以太网物理层片段产生的以太网帧校验序列
在该头部中关于IEEE 802.1Q的字段有4个字节,该协议通过VLAN的划分使得相同物理链路上得以传输相互独立的网络流量;用户优先级字段提供了IEEE 802.1p中规定的QoS保障,支持8种服务分级。此协议非必选,若不使用IEEE 802.1Q则可以在帧头中去掉相关的4个字节。
4.5 物理层
物理层的功能是负责与传输介质的连接,并定义物理接口和信号的电气规格。在TMoIP中主要使用的是以太网协议(IEEE 802.3)中相关的物理层机制,主要包括的类型如表5所示。

表5 物理层可选机制Tab.5 Physicallayeroptionalmechanism名称标准描述100BASE-TX802.3u支持100Mbps的铜线/双绞线传输100BASE-FX802.3u支持100Mbps的光纤传输10BASE-T802.3i支持10Mbps的铜线/双绞线传输10BASE-F802.3j支持10Mbps的光纤传输1000BASE-X802.3z支持1000Mbps光纤传输的千兆以太网1000BASE-T802.3ab支持1000Mbps双绞线传输的千兆以太网
原始的PCM信号,经过TCP/IP五层模型从上到下的处理和封装后,转化为TMoIP信号从物理层接口输出,历经一系列传输后又从另一个网络处理器的物理层接入,从下到上对包进行解析,最终恢复出原始的PCM信号,这就是五层模型的作用。根据实际应用场景的不同,可选择仅运行PCM与TMoIP信号之间的单边转换,以实现特定的功能。
5 结束语
TMoIP技术的引入为地面遥测网的更新换代提供了重要的理论参考,其具有提升系统容量、降低系统复杂度、增强系统可扩展性和可维护性等优势。目前国际上对该技术的研究发展正不断深入,这也迫切要求国内遥测系统的研究者紧跟其发展的脚步。于是本文总结了历年国际遥测年会的相关论文及标准文献中关于TMoIP技术的描述,梳理了其发展进程和研究现状,利用TCP/IP五层模型对其技术实现及相关要点进行了重点阐述。从遥测系统发展的全局角度来看,TMoIP技术能在不影响现有地面遥测网整体架构的基础上逐步替代和升级网络中的设备设施,提高网络的性能,具备可实现性。当前协议研究已较为完善,下一步的工作是扩充TMoIP的使用场景、研发相应的硬件设备以及开发相应的软件,从而将TMoIP技术真正地落实落地。
