齿鲸生物声呐目标探测研究综述*
2021-08-14 07:54宋忠长张金虎冯文杨武夷张宇
物理学报 2021年15期
宋忠长 张金虎 冯文 杨武夷 张宇†
1) (厦门大学环境与生态学院, 近海海洋环境科学国家重点实验室, 厦门 361005)
2) (厦门大学海洋与地球学院, 水声通信与海洋信息技术教育部重点实验室, 厦门 361005)
齿鲸依靠其天然的声呐系统进行水下目标探测.齿鲸通过前额的声发射系统发出超声脉冲, 经声阻抗各异的声学结构调控形成波束, 作用于目标, 利用下颌区域的多相声接收通道接收目标回波.齿鲸通过分析目标回波中蕴含的时域、频域与能量等多维度信息, 并进行非线性组合, 实现目标探测与辨别.齿鲸目标探测过程蕴藏复杂的物理机理.本文以目标探测实验测量、目标回波散射分析与仿齿鲸声呐系统为出发点, 回溯齿鲸声呐目标探测的相关研究.齿鲸在目标探测过程中, 会根据目标强度、回波的时频信息, 自适应调整其声发射脉冲频率、发射系统几何形态, 实现高效探测, 是优越的水声探测系统.参考齿鲸声呐设计人工探测系统可获取多维度的声场信息, 与生物实验测量相辅相成, 加深对生物多相介质中的声发射与声接收过程的理解,丰富齿鲸目标探测物理机理认知, 为人工仿生声探测技术的发展与仿生水下装置设计提供新参考.
1 引 言
水下目标探测研究具有重要的实用价值, 声波是当前水声探测的主要手段[1,2].自然界中存在天然的、高效的水声声呐系统—齿鲸生物声呐[3-13].齿鲸声呐主要由两部分组成: 位于头部前额的声发射系统以及位于头部下颌区域的声接收系统[4,14-17].在目标探测过程中, 齿鲸通过声源发出超声脉冲,经由前额软组织结构、鼻道结构、气囊系统与上颌骨调制形成声波束, 作用于目标[14,18-21], 产生回波.齿鲸能利用目标回波的时域、频域以及能量等多维度信息分辨目标[22,23].齿鲸的目标探测过程是动态的, 目标回波信息能反馈于声发射.齿鲸能针对目标特性以及距离, 自适应调控超声脉冲频率与间隔[24-35], 并利用目标之间尺寸、形状、结构与材质作为判别标准, 进行辨别[31-33].Kellogg[36]在1958年开展研究, 发现宽吻海豚能通过发出超声脉冲判别鱼的尺寸, 从而择优选取食物, 证明了其目标辨别能力.宽吻海豚属于齿鲸亚目下的海豚科, 该科目还包含真海豚、中华白海豚、虎鲸等生物, 均具备生物声呐与目标探测能力.此后, 研究人员开展了一系列齿鲸目标探测研究[7,8,27-34,37-41], 发现齿鲸的探测效率与目标的材质、尺寸均相关.齿鲸虽能区分尺寸各异的目标, 但具有特定的阈值范围, 目标尺寸过小会影响齿鲸的目标探测效率[37-39].Evans和Powell[37]在1967年发现, 以75%检测准确率为标准, 海豚能区分厚度分别为0.22, 0.32与0.64 cm的铜盘.当铜的厚度调整为0.22, 0.27与0.16 cm时, 海豚便很难再分辨这3个厚度不同的圆盘.当探测目标置换为钢制圆壳时, 同样检测率标准下,海豚的探测精度会降低[41], 充分说明了材质、形状等因素会影响齿鲸的辨别能力.
齿鲸在目标探测过程中探测声阻抗不同的目标时, 产生的回波的强度与时频特性均存在差异[12,42-46], 可以作为齿鲸区分不同目标的参考信息[10,31,46,47].Palihas等[9]利用仿生声呐信号进行目标探测实验, 发现不同材质的圆柱壳回波频谱特性有所差异, 可用于目标辨别.Bel’kovich和Borisov[43]研究表明海豚能区分外形一致, 而内部结构差异的目标.齿鲸的回声定位脉冲拥有一定的频率分辨率[48], Au和Pawloski[49]发现海豚能够辨别振荡的噪声频谱与非振荡的噪声频谱, 但并未表明海豚是否利用该频谱信息分辨目标.齿鲸在目标探测过程中如何整合目标回波的各个维度信息, 实现目标辨别还需后续研究[50-52].
齿鲸的目标探测是一个动态的、复杂的过程,齿鲸自身的自适应行为(如摆动头部, 改变声信号频率与几何形态)虽丰富了研究内容, 却也在一定程度上为实验的可控性提出了挑战.为此, 可引入数值模型与人工设计从多角度研究齿鲸目标探测过程.参考齿鲸的回声定位脉冲的信号特征, 可构造仿生超声脉冲的函数表达式作为声激励, 将其输入仿齿鲸声呐系统人工结构, 结合数值模拟和实验测量完善对目标探测物理机理的研究, 为人工声呐系统设计提供参考.
齿鲸的目标探测就是一个应用主动声呐的过程.齿鲸在目标探测过程中的环境参数(如噪声强度)、目标强度、以及其发出的声呐信号的强度的变化均会直接影响探测效率, 过程如下式所示:

其中, DT为探测阈值, SL为齿鲸发出的超声脉冲信号的声源级, TL为传播损失, TS为目标强度,NL为环境噪声级, DI为系统指向性指数.本文从齿鲸生物动态探测、声呐信号模型静态探测与齿鲸声呐物理模型出发, 介绍了齿鲸目标探测的物理过程.齿鲸能自适应调控其声呐信号, 作用于目标,分析回波中的时域、频域及其组合而成的高阶信息, 实现目标探测.本综述可为继续深入研究齿鲸目标探测物理机理、设计新型探测系统提供一定参考.
2 齿鲸声呐动态目标探测研究概述
2.1 目标探测效率与探测距离
由声呐方程(1)可知, 若齿鲸的探测阈值(DT)是固定的, 则目标强度的变化会影响探测距离, 目标强度与材质、结构与尺寸是相关的.Zaslavskiy等[53]以90%正确响应为标准, 发现宽吻海豚对75 mm高的金属圆柱探测距离可达11 m, 对115 mm高的塑料圆柱与木制圆柱的探测范围则分别为7.3与6.8 m.目标尺寸越大, 声散射强度与目标回波相应增强, 探测距离会相应变长[54].材质也会影响探测距离, 宽吻海豚对同一尺寸的橡胶、蜡制、铅制与钢制圆球的探测距离分别为5.9, 7.8,11.1 与12.4 m[41,55].Murchison等[56,57]在开放水域开展实验, 评估距离对宽吻海豚探测目标的影响, 结果表明随着距离的增加, 海豚探测目标的效率会降低.以海豚的50%探测正确响应为标准, 宽吻海豚对2.54 cm直径实心钢球和7.62 cm直径充水不锈钢球体的探测范围分别可达到72.3和76.6 m.Au和Snyder[58]利用重复实验, 表明宽吻海豚在50%正确响应标准下的目标探测范围可至113 m, 指出Murchison等[56,57]的实验中可能受混响干扰, 即噪声背景强度会影响探测距离.Au等[59]研究发现白鲸在噪声增强时会变化其声信号频率与信号能量, 平衡噪声影响.环境噪声强度不仅会直接决定噪声级NL的大小, 还会间接改变声源级、声接收指向性[60], 影响目标探测过程.齿鲸目标探测实验大多数以单目标或者一定数量的目标为基准, 而齿鲸在实际探测过程中, 遇到的目标是多样化的, 可能是单目标, 如大型鱼类, 也可能是目标群, 如鱼群[46,61].目标强度的改变会影响探测距离.Babkin等[54]实验发现宽吻海豚对单只鱼的最远探测距离为9.8 m, 而对4000只鱼组成的鱼群的探测距离预估可达350 m[41].针对同一目标, 在特定范围内, 距离不会显著影响海豚的探测效率(图1)[58], 当距离超过一定范围, 探测效率会降低.

图1 宽吻海豚目标探测准确率随距离的变化趋势[58]Fig.1.Dolphin’s performance as a function of range[58].Reprinted with permission (RightsLink: https://s100.copyright.com/CustomerAdmin/PLF.jsp?ref=a66368f0-df92-40d7-b308-5da5b8b92324).
由此可知, 齿鲸的目标探测是自适应的.齿鲸在目标探测过程中会依据实际情况调控其声源级、声信号频率, 改变探测策略.如图2所示, 鼠海豚在目标探测过程中会调控超声波束以及探测区域面积[24,34].靠近目标过程中, 鼠海豚会改变超声脉冲信号频率与头部几何形态, 调控声波波束, 实现最优探测[24].齿鲸的目标探测是一个复杂的物理过程, 涉及因素多, 与生物自身状态、环境, 以及目标强度均相关.背景环境声场的改变会直接或者间接改变声呐方程中的许多参数, 进而改变齿鲸目标探测过程.开展齿鲸目标探测研究需要结合实际情况, 从多角度展开.
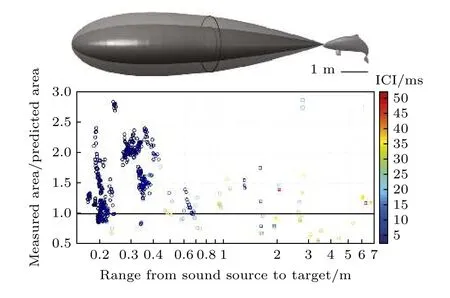
图2 鼠海豚的声波束随目标探测距离的变化趋势[24]Fig.2.Approximate detection volume for a harbour porpoise tracking fish in a quiet environment and relative change in the size of ensonified area ahead of the porpoise as it approaches a target[24].Reprinted with permission(RightsLink: https://elifesciences.org/terms).
2.2 齿鲸声呐目标辨别
由声呐方程(1)可知, 若其他参数固定, 则目标强度与检测域值存在关联, 从而影响齿鲸对不同目标的辨别.目标回波特性是由目标物理特性决定的, 不同材质目标回波的时域、频域特征均有所差异[13,22,28,37,62-66].图3给出了宽带脉冲声信号作用于圆柱壳(外径50 mm, 内径40 mm, 厚度10 mm)时得到的回波[66].时域、频域结果均表明, 该目标回波主要由两部分组成, 镜面反射波与弹性波.镜面波与第一次弹性波之间的时差称作TSP (time separation pitch), 齿鲸可利用TSP评估目标厚度[8,13].Delong等[8]以及Au和Pawloski[13]训练宽吻海豚探测厚度为6.35 mm, 长度为12.7 cm,外径为37.85 mm的铝制圆柱筒, 并以0.2, 0.3, 0.4与0.8 mm为步长, 分别增加或减小圆柱筒厚度,进行实验.随着壁厚之间差值的减小, TSP会随之发生变化, 而海豚的目标探测准确率会降低.Delong等[8]研究发现以75%正确响应为标准, 宽吻海豚可检测壁厚变化范围为—0.23—0.27 mm(图4).圆柱筒的外径保持不变, 当内径增加或减少同样幅度时, 探测精度有所差异[8].
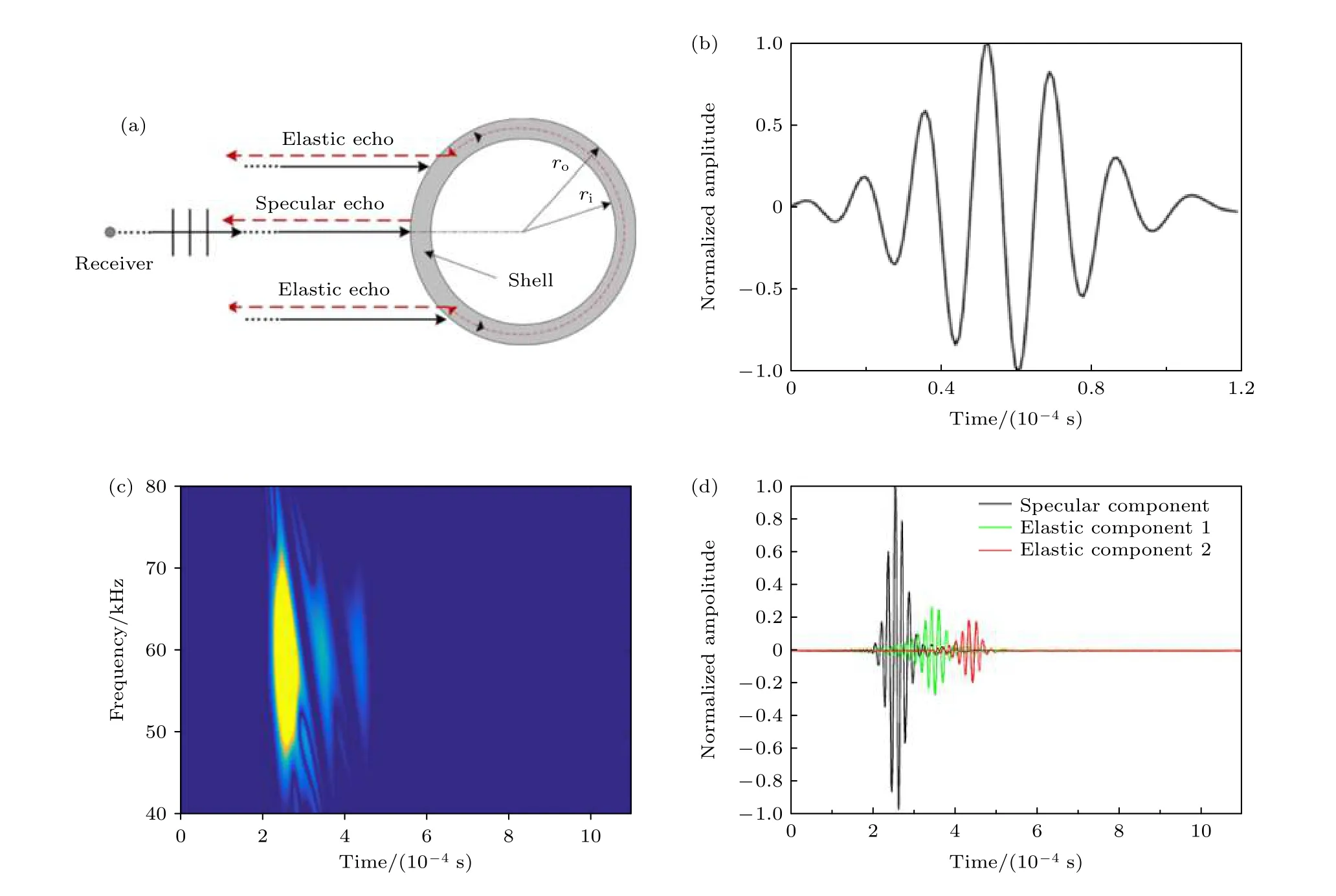
图3 宽带仿生声呐脉冲信号及圆柱壳回波 (a) 仿生脉冲作用于圆柱壳示意图; (b) 仿生脉冲时域特性; (c)目标回波时频特性;(d) 目标回波的镜反射与弹性成分[66]Fig.3.A biomimetic broadband pulse and echoes from the cylindrical shell: (a) Geometric illustration for a pulse incident upon a shell; (b) waveform of the biomimetic pulse; (c) modified time-frequency of the synthetic echo of targets; (d) extracted elastic echo and the original synthetic echo[66].
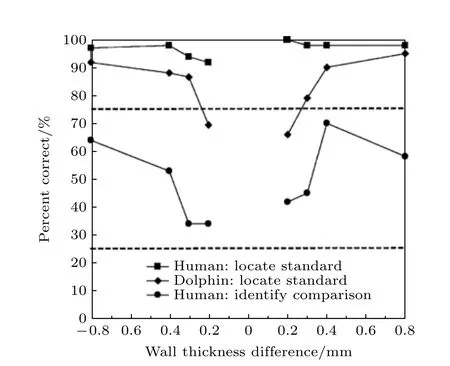
图4 人类与宽吻海豚的目标识别率随厚度的变化趋势对比[8]Fig.4.Comparison of performance in identifying the comparison and standard targets between human and dolphin as a function of the wall thickness[8].Reprinted with permission (RightsLink: https://s100.copyright.com/CustomerAdmin/PLF.jsp?ref=b173fda8-9b88-4bde-943f-ddbed16528ba).
海豚在目标识别过程中可使用多维度信息, 除了目标回波强度与时长, 海豚还可利用前壁和后壁的反射波之间的时间延迟区分壁厚.以标准目标为参考, 当壁厚增加与减小同样厚度时, 圆柱壳中的周向表面波频散特性会有所差别.周向表面波在薄柱壳中传播得更慢, 相对更厚的圆柱壳, 回波差异更明显, 利于分辨.壁厚减小时, 回波的频谱会往低频偏移而壁厚增加时, 回波的频谱往高频偏移[7,28].目标回波中的时域、频域信息均可用于目标辨别[46].
为探究齿鲸如何综合目标回波中包含的多维度信息, 人工神经网络被用于组合目标回波的各项声学特征[8,10,64,65].结果表明, 同时使用回波的时域、频域信息时的目标识别效率高于单独利用频域信息[64,65].海豚在探测过程中会综合回波信号的目标强度、时长、信号峰数量、峰值频率、中心频率以及均方根带宽等参数(图5), 提升目标探测效率.
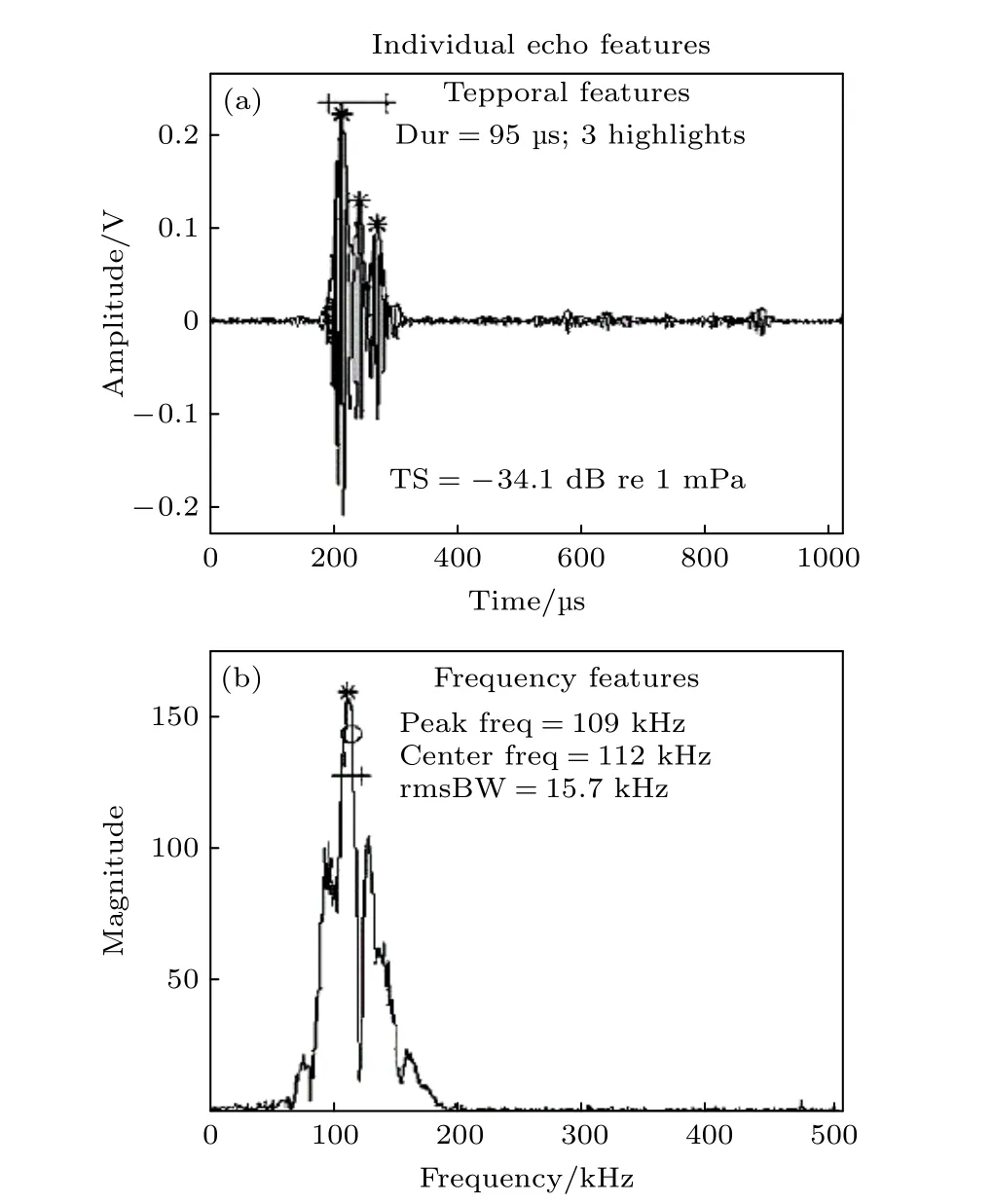
图5 目标回波特征 (a) 时域特征; (b) 频域特征[10];Duration (Dur), Highlight, TS, Peak frequency, Center frequency, rmsBW分别表示时长、局部峰值、目标强度、峰值频率、中心频率与均方根带宽Fig.5.Echo features.(a) Features in time domain, including duration (line above echo) and number of highlights(marked with asterisks).Target strength is also shown on the bottom of the graph.(b) Features in frequency domain,including peak frequency, center frequency, and rms bandwidth[10].Reprinted with permission (RightsLink: https://s100.copyright.com/CustomerAdmin/PLF.jsp?ref=34445ac7-c515-4487-bb56-0be555fd3cfc).
3 齿鲸声呐静态目标探测研究
3.1 目标探测过程中声传播与散射
齿鲸在探测目标时, 首先发射声波, 作用于目标, 接收与分析目标回波.这些物理过程涉及声波在流体以及固体介质中的传播.在小振幅振动条件下, 声波在流体中的传播可由波动方程表述:

其中p是声压, ρ是声传播条件下密度, ρ0是静态下的介质密度, cs是声在介质中的传播速度(m/s),Qm为声源激励.
声波在传播过程中遇到声阻抗不同的介质会发生散射.当声波在固体中传播时, 其纵波和横波传播方式可描述为

其中, v是速度向量, λ和μ是描述压缩和剪切模量的拉梅常数.齿鲸目标探测过程中, 涉及声波在不同介质之间的耦合, 包括流体与流体之间、流体与固体之间以及固体与固体之间.流体之间的边界条件满足界面上声压与法向速度连续.而流体与固体, 固体与固体间的连续条件为法向速度连续与法向应力连续.研究齿鲸目标探测机理时, 会参考实际齿鲸发出的回声定位脉冲, 设置脉冲信号.脉冲的频率及带宽设定可参考实际所研究齿鲸的回声定位脉冲信号特性.如对齿鲸中能发出宽带脉冲的种类, 可构造超声脉冲 Qm形式为

其中A0为控制脉冲幅度参数, t0与σ为控制高斯脉冲峰值与宽度的参数, f0为声源脉冲的声波峰值频率, T为脉冲长度.齿鲸发出的声波作用于目标后, 会产生散射波.令平面中波数为k (k = ω/c, ω为角频率, c为背景介质声速)的声波作用于半径为a的弹性球体时, 在空间中产生的总声压场p可由下式表示[67-69]:

其中, i是虚数单位, p0为入射声压常数, Pn为勒让德多项式, Jn是贝塞尔函数, Hn(1)表示一阶汉克尔函数, r为距离参数.bn为系数矩阵, 可由弹性散射体与流体介质交界处的连续条件, 结合克拉姆法则、波数k、贝塞尔函数以及汉克函数进行求解[67-69].(5)式为标准圆柱目标散射的解析解, 若目标类型不同, 则相应的解析形式会有所差异[67-69].
3.2 仿齿鲸声呐脉冲信号目标探测研究
早期研究齿鲸目标探测主要依靠实验测量与行为观察, 发现齿鲸的目标探测是一个主动的、自适应的过程[24].齿鲸会根据实际情况调整探测策略, 动态改变声波频率与波束宽度.齿鲸的自适应调控效应虽丰富了研究内容, 却也在实验中带来不确定性.数值模型可排除齿鲸在目标探测过程中来源于其自身自适应行为的干扰, 为实验研究提供补充和辅助, 更好地探究齿鲸目标探测背后的物理过程[9,11,66,68,70].Pailhas等[9]通过设置仿海豚超声脉冲作为声激励(图6), 作用于PVC管与钢管, 其目标后向散射声波表明不同目标回波的时频信息存在明显差异.钢管与PVC管的散射波在时域上、频域上均存在显著不同, 可用于辨别, 证明了使用仿生声呐脉冲进行目标探测研究的可行性.
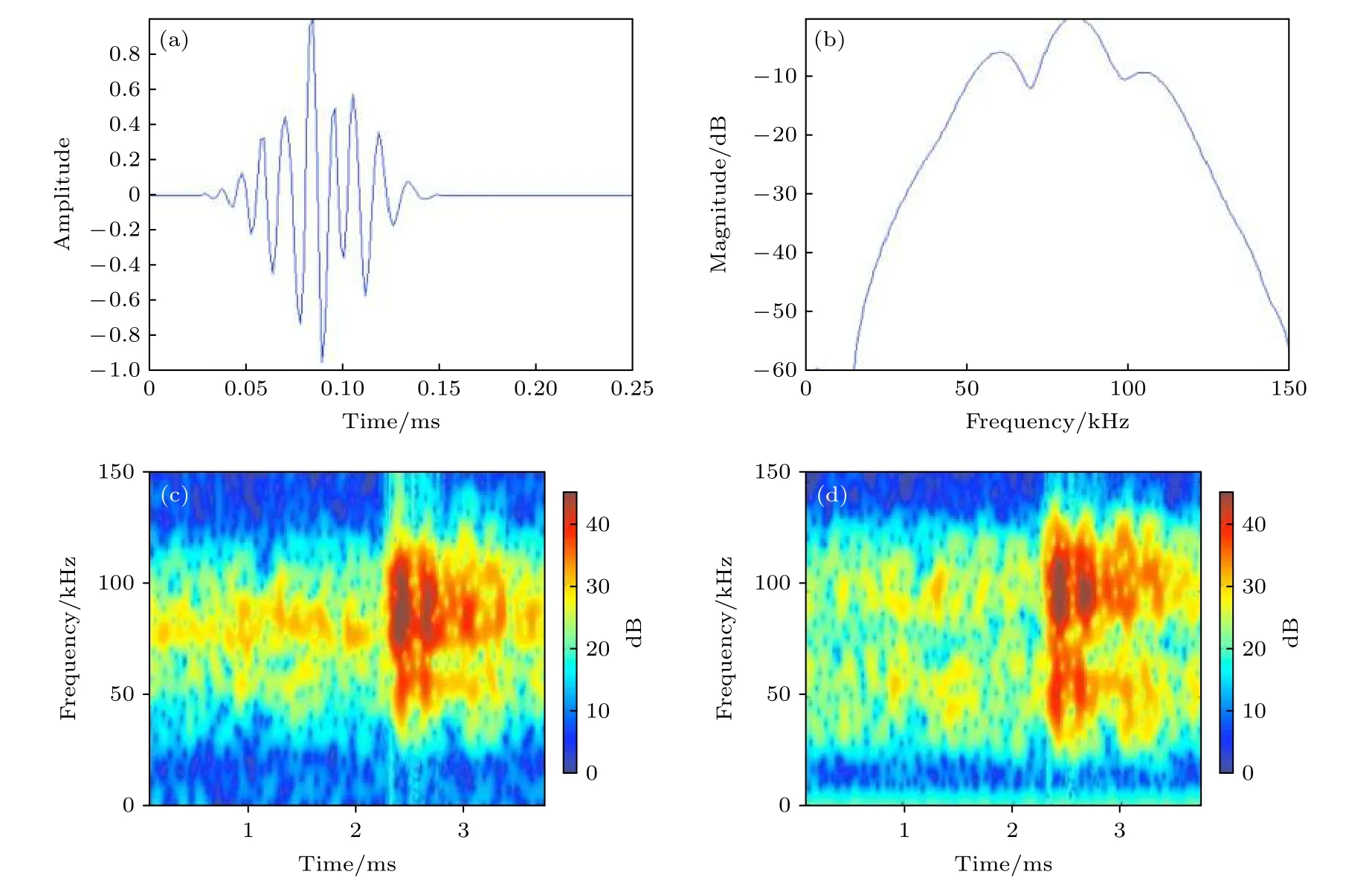
图6 仿生超声脉冲及与目标回波特性 (a) 仿生超声脉冲信号时域特性; (b) 仿生超声脉冲信号频谱特性; (c) PVC管回波时频特性; (d) 钢管回波时频特性[9]Fig.6.Biomimetic pulse acts on tubular targets and the echoes: (a) Display of the biomimetic pulse in time domain; (b) power spectrum of the pulse; spectrograms of PVC tube (c) and steel pipe (d) target for the biomimetic pulse[9].Reprinted with permission (RightsLink: https://s100.copyright.com/CustomerAdmin/PLF.jsp?ref=9f39d17e-b79f-4173-a2fd-bc04cca52724 ).
实际探测中, 齿鲸遇到的目标大多数是自由游动且非规则的.Au等[46]在2009年, 以大西洋宽吻海豚和港湾鼠海豚的声呐信号为参考, 设置仿生超声脉冲信号探测大西洋鳕鱼、鲻鱼、明太鱼和鲈鱼(图7).当声脉冲从垂直于鱼的长轴方向入射时,目标回波振幅大且反射波较少, 利于区分目标.当入射方向偏离垂直方向时, 回波结构变得复杂.四种鱼的目标回波时频信息差异明显, 蕴含足够可辨别的声学特征.但Au等[46]认为回波信号的时频信息只是齿鲸目标探测过程中使用的信息之一, 齿鲸在探测过程中还可能通过目标在游动状态下得到的回波的强度变化、信号变化进行判别.目标回波的各项声学特征在齿鲸分辨目标时占据特定权重, 目标探测是一个综合判断的结果.

图7 鳕鱼(Cod)、鲻鱼(Mullet)、明太鱼(Pollack)和鲈鱼(Sea bass)回波的时频特征[46]Fig.7.Time-frequency representation of the echoes using the dolphin-like biosonar signal[46].Reprinted with permission (RightsLink:https://s100.copyright.com/CustomerAdmin/PLF.jsp?ref=f7614cb8-8672-41a7-9f83-6f729a0ec2ff).
齿鲸在目标探测时会利用回波的综合信息, 对目标回波进行高阶处理, 提高探测效率[11,66].在回波中, 利用弹性波辨别目标的效率可能高于利用镜面反射波.Qiao等[66]运用分数阶傅里叶变换从回波中滤除目标镜面反射波保留弹性波(图8), 发现回波差异主要蕴含在弹性波中.相比时域波形或频域谱图, 目标回波的时频图可更充分地反映不同钢球壳的回波特性差异, 再次证明齿鲸的目标探测过程是一个综合判断的结果.

图8 钢球壳回波的时频信息以及滤除镜面反射波后的时频特性[66] (a) 1 mm厚度球壳回波时频特性; (b) 10 mm厚度球壳回波时频特性; (c) 15 mm厚度球壳回波时频特性; (d) 1 mm球壳滤除镜面反射波时频特性; (e) 10 mm球壳滤除镜面反射波时频特性; (f) 15 mm球壳滤除镜面反射波时频特性Fig.8.The Wigner-Ville distribution of the backscattering echoes of the target with (a) 1 mm, (b) 10 mm, and (c) 15 mm thickness.The corresponding modified distributions of the elastic echoes of the target with (d) 1 mm, (e) 10 mm, and (f) 15 mm thickness[66].
4 齿鲸声呐发射系统模型目标探测进展
声呐方程中包含的指向性指数(DI)表明指向性也会影响齿鲸目标探测.齿鲸生物在探测过程中, 会在头部外形成强指向性的声波束[14].科学家认为齿鲸形成声波束从而在目标探测中建立优势是其进化出产生高频超声脉冲的驱动力[26,34].不同齿鲸声发射系统的指向性指数存在差异, 会影响其探测过程.相比于无指向性声波, 指向性波束能提高生物声呐的有效探测距离.与无指向性仿声脉冲相比, 指向性波束可改变(1)式中的指向性指数,增强目标探测能力.若将齿鲸声发射系统当成活塞辐射换能器(半径为a), 则其指向特性R(θ)可由下式估算得出[2,71,72]:

其中, k是波数, a是活塞辐射面的半径, J1是一阶贝塞尔函数.若可知齿鲸的头部尺寸, 以及其发出的超声脉冲的频率, 则可估算波束指向特性.不同齿鲸的尺寸各异, 且发出的声波频率存在多样性,但均能将声波调控成强指向性超声波束用于目标探测, 体现了齿鲸声呐系统功能的一致性.相比于仿齿鲸脉冲信号, 将齿鲸声发射系统加入数值模型, 研究目标探测过程, 可获取更多信息.Feng等[67,70]结合实际齿鲸亚目鼠海豚科江豚头部的计算机断层扫描结果(图9), 构建其声呐探测模型,研究了其目标探测过程.
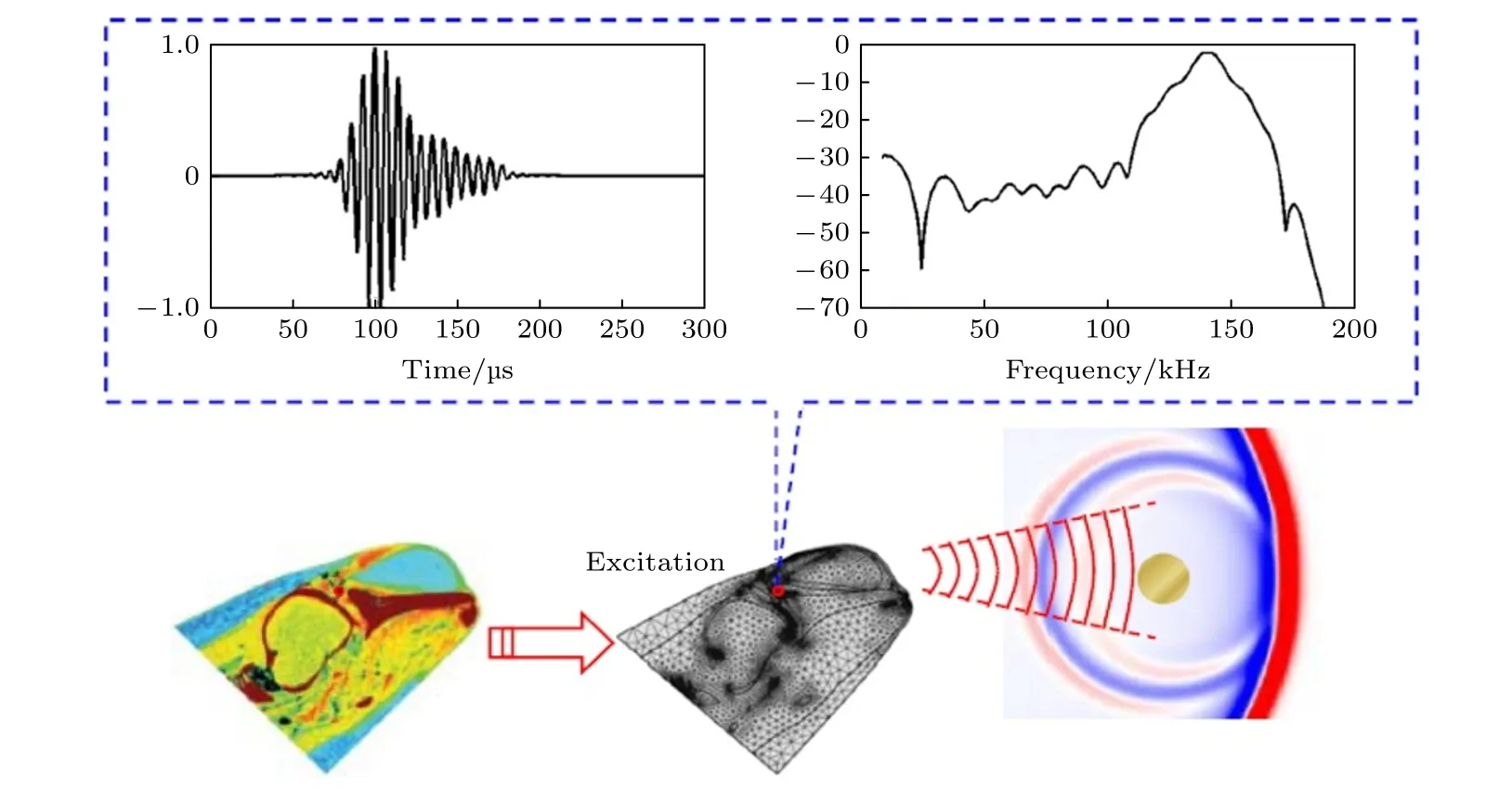
图9 江豚目标探测模型构建过程图解及激励波形和功率谱图[67]Fig.9.A systematic diagram of a biosonar model of an echolocating finless porpoise, where waveform and power spectrum of the excitation click are also presented.The finite element model was constructed based on the CT scan data[67].
图10 给出利用Feng等[68,70]构建的模型探测实心钢柱和亚克力柱时得到的回波波形和频谱[67].钢的声阻抗大于水, 形成强烈的镜反射, 透入钢柱内部的能量较少.而亚克力的声阻抗与水接近, 镜反射波弱, 大部分能量透入到圆柱内部.因此, 钢的回波强度在50—100 μs之间大于亚克力, 但在150—300 μs之间则小于亚克力.在100—150 μs之间, 镜反射波与其他路径到达的声波重叠使得亚克力的回波强度增加, 超过钢柱回波强度.钢柱回波有2个Highlights (回波局部最大值)[8], 亚克力柱回波有5个Highlights.两种材质的回波的时域波形存在明显差异.回波的频谱虽具有相似的轮廓,但频谱细节也呈现出明显差异.亚克力柱回波的频谱波动大于钢柱.在—30 dB范围内, 钢柱回波信号的频谱只有两个峰, 而亚克力柱的回波频谱具有3个峰(图10).这些信息表明该江豚声呐系统能通过回波的时频信息有效区分钢柱与亚克力柱.

图10 钢柱与亚克力柱回波的时域与频域特征[67]Fig.10.Simulated waveforms and frequency spectra of the echoes from steel and acrylic cylinders using finless porpoise’s model[67].
设计仿齿鲸声呐人工声探测系统可进一步丰富目标探测研究.图11给出仿江豚声发射系统人工物理模型的设计及实验过程[71].建立声发射系统人工物理模型需参考实际江豚的几何结构与声学特性(图9).江豚声发射系统主要包含软组织、上颌骨和气囊.人工物理模型中的上颌骨可由3D打印不锈钢而成, 气囊则可通过参照气囊几何形态, 利用聚乳酸材料进行3D打印, 将空气封入其中, 形成人工气囊结构.物理模型的关键在于实现软组织的声速梯度特性.江豚前额声发射系统软组织从内到外声速递增.为实现该声速渐变特性,参考等效介质理论[73-76], 设计人工超材料结构.等效介质理论即参考声散射理论, 在基底介质中插入特定尺寸的介质(填充材料), 实现声速可控.结构的等效声速可由下式决定:

图11 江豚声发射系统人工模型及实验测量 (a) 声发射人工模型目标探测示意图; (b) 目标探测实验系统; (c) 无人工模型目标探测时域波形结果; (d) 人工模型目标探测时域波形结果[71]Fig.11.Bioinspired device and its experiment setup: (a) Schematic showing the experimental setup of the biosonar device (PPM);(b) photograph of the underwater target detection setup; (c) measured pressures of the system without PPM at θ = 20° (lower) and 65° (upper), where Object 1 and its jamming Object 2 were used for underwater detection; (d) pressures of the system with PPM at θ = 20° (lower) and 65° (upper)[71].

其中, φ是填充材料的填充率, ρa是填充材料的密度, ρw是水(基底介质)的密度, Ba是填充材料的体积模量, Bw是基底介质的体积模量.通过改变上述各项参数, 可实现结构整体的等效声速接近江豚软组织.该结构与人工上颌骨、人工气囊可组成声阻抗大小分布接近江豚声呐的人工声发射物理系统, 并进行目标探测实验.相比无模型条件, 该人工物理模型能将声波调控成超声波束, 声能量被调控往前向传播, 从而使上颌骨正前方目标回波能量大于下方, 增强目标的镜面回波能量, 提高探测效率.结果表明, 参照齿鲸声呐系统设计人工物理模型, 进行目标探测是可行的, 可为设计新型人工声探测系统提供新思路.
5 结论与展望
齿鲸的目标探测过程包含复杂的物理过程.齿鲸利用多相介质组成声发射系统, 将回声定位声脉冲调控形成声波波束进行目标探测.目标探测过程中, 齿鲸会自适应调节声信号频率与波束特性, 提高探测效率.目标回波包含的信息是多维度的, 齿鲸能利用回波的目标强度和时域、频域声学特征,进行非线性组合, 提高目标探测效率.目标回波的波形、散射声场以及目标内的声场空间分布均会受目标物理特性的影响.当前关于齿鲸声呐目标探测所利用的回波信号均来自齿鲸声接收系统外部, 尚未考虑声接收系统对目标回波的耦合作用.后续研究中需耦合齿鲸声发射、声接收系统形成完整的齿鲸声呐目标探测系统, 为深入探索齿鲸目标探测物理机理提供全方位的信息.此外, 齿鲸指向性波束的动态变化是否影响目标探测过程也需后续研究.研究齿鲸目标探测过程可为后期设计新型仿齿鲸声呐人工声探测系统打下坚实基础.
感谢中国科学院水生生物研究所王丁研究员、王克雄研究员, 中国科学院深海科学与工程研究所李松海研究员,自然资源部第三海洋研究所王先艳老师、杨燕明老师在研究中提供的大力支持, 以及厦门大学环境与生态学院李炎老师、海洋与地球学院徐晓辉老师在研究开展过程中的帮助.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
汽车观察(2021年11期)2021-04-24
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
学生天地(2019年30期)2019-08-25
宇航计测技术(2018年3期)2018-09-08
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年6期)2014-03-01
太原城市职业技术学院学报(2014年9期)2014-02-27