民用飞机攻角传感器自动调节系统研究
2021-08-13 04:26吴熙
机械制造与自动化 2021年4期
吴熙
(上海飞机制造有限公司,上海 201324)
0 引言
随着航空科技的发展,对飞机失速现象的预防已经有一套有效的预警机制和系统。根据飞机失速特性的不同,各型号民用飞机在临近自身的失速迎角时,均能采用触觉、听觉和视觉的告警方式提醒飞行机组,甚至部分失速保护系统还能在飞行机组对告警疏忽的情况下,主动控制飞机驾驶杆以降低迎角,从而避免飞机进入失速区域。攻角传感器作为失速保护系统的重要组成设备,是发出告警信息以及主动作动信号的核心器件[1]。
攻角传感器是专门用于测量飞机迎角的设备,广泛应用于各种民用航空机型。攻角传感器主要是由风标探头组成。风标探头置于机体外侧,用于感知周围气流方向,测量出飞机的迎角,进而将测出的模拟数据发送至失速保护计算机转换成数字信号,并可以把此信号输出给仪表显示,并触发失速告警系统。当实际迎角接近临界迎角而使飞机有失速的危险时,失速告警系统即发出各种形式的告警信号。在飞行控制系统中常引入迎角信号来限制最大法向过载。迎角信号还可用于油门控制系统[2]。
1 攻角传感器在型号功能试验测试情况介绍
攻角在飞行控制中是一项很重要的参数。飞机在飞行过程中,由于受到气流的压力影响,攻角所处的位置始终是自身空气阻力最小的位置。所以通过它输出角度信号给飞控系统,可以指示飞机的飞行姿态[3]。因此在设计飞行控制系统中以及飞机生产制造过程中,都需要对攻角进行调节,以验证不同攻角下产生的不同控制效果,检查攻角传感器输出信号是否正常[4]。
飞机的攻角信号是通过攻角传感器测量产生的,因此可用调节攻角传感器来给飞机提供所需的攻角信号。在某机型的功能试验中,需要调节飞机攻角传感器使其产生多个迎角值以验证飞机各系统的功能是否达到设计所要求的指标。特别是在失速告警试验中,不同空速和不同襟缝翼卡位构型,有不同的临界攻角,并且需要攻角在临界攻角上下来回调节以验证飞机的失速告警功能。该机型有3套攻角系统,左上前机身攻角传感器1套、右上前机身攻角传感器1套、左下和右下前机身攻角传感器共为1套。
在调节传感器过程中,需要这些传感器保持同步运动,运动过程中角度差不能太大,运动结束后角度差也不可太大,否则迎角数据会失效。同时,每个传感器调节的最终结果需要达到所给定的角度,否则综合表决角度存在超差风险。
目前该机型功能试验是采用人工调节攻角传感器的方法。操作人员通过升降车到达左右前机身的攻角传感器区域,每侧至少需要两个人,再由一名操作人员通过飞控测试接口装置读取各个迎角传感器的值,并反馈给攻角传感器的操作人员。由于操作人员无法直观了解攻角传感器的数值,操作极为不便,两边的操作人员协调也较为困难。且攻角传感器的灵敏度较高,稍有抖动就会超差使得攻角值失效,这也进一步增大了试验的难度,使试验效率较低。为解决以上问题,需要研制一套系统来实现飞机攻角传感器角度的自动调节。该系统可应用于攻角传感器的相关试验,为飞控航电等系统提供一个准确的攻角值,并且能实现多个攻角传感器同时调节、单个调节及微调。这样可避免4个攻角传感器的角度值差值过大而失效,以提高试验效率和攻角调节的精度。
2 攻角传感器自动调节系统
2.1 技术总方案
一般飞机两侧都有多个攻角传感器,攻角传感器质心在转动轴上,且转动力矩小,因此容易受干扰。因攻角传感器的分布在飞机不同的位置,每个攻角传感器的转动角度有细微的角度区别。要实现对攻角传感器的控制,需要一套结构轻巧的调节装置。该装置转轴与攻角传感器的转轴同轴,由电机驱动。使用多个这种调节装置来调节飞机上所有的攻角传感器。这些调节装置的驱动电机由控制器统一控制,实现同步转动或单个转动;不仅可以实现直接角度值控制,也可以实现按键微调控制。控制器提供网络接口与PC机连接,便于功能的扩展,如通过输入角度-时间曲线对每个攻角传感器的控制,这样可以逼真地模拟出飞机实际飞行中攻角传感器的运动。控制器也可采用RS485接口与飞机测试平台通信,实现飞机的自动化测试。整个系统的结构如图1所示。
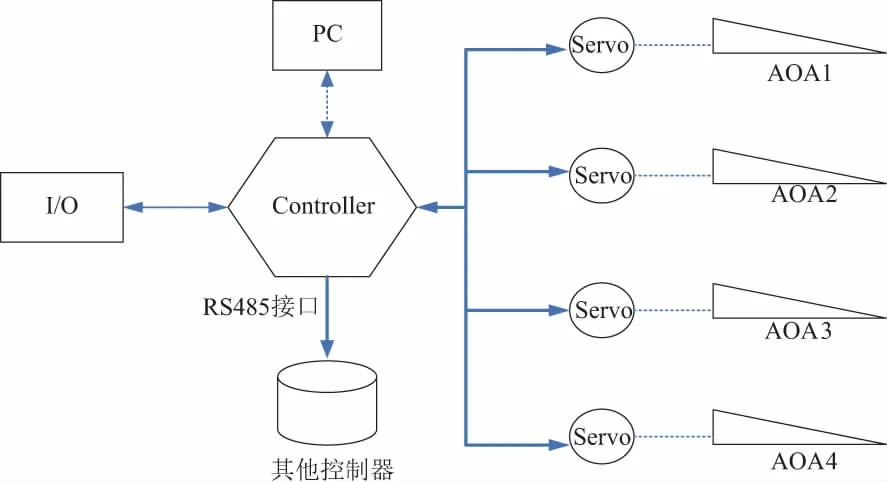
图1 攻角调节系统架构
2.2 调节装置夹具设计
攻角传感器本身的防护盖安装孔可以用来安装调节装置,定位销孔可以用来调节装置的定位,如图2所示。2个防护盖安装孔可承受的质量不超过0.45kg;试验中所需传感器角度值不超过60°;4个攻角传感器之间的角度差不超过2°。为满足目前的使用,并方便后续升级,选用一款质量轻、精度高的AM17SS1DG电机,该电机质量为0.39kg,精度0.018°;并设计该电机的安装底座,底座的加工精度为0.07°,再加上安装上存在的误差,综合得到的调节精度不超过0.5°。
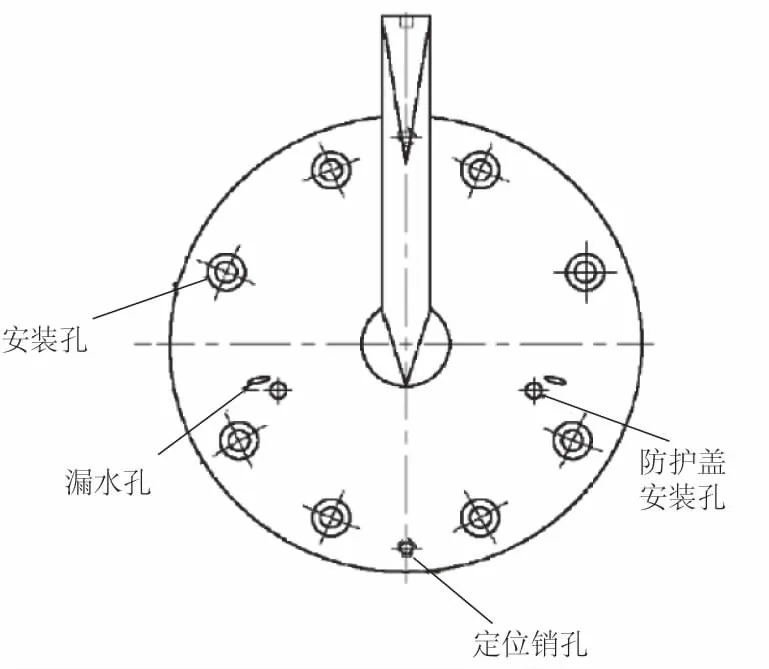
图2 攻角传感器
根据攻角传感器的顶层图样和数模,进行调节装置的详细设计。调节装置包括电机、底座、转接头、夹头等部分如图3所示。夹头夹持在风标上,并由弹簧压紧风标,使2个V型面贴合。转接头用于连接电机与夹头的轴。电机直接安装在底座上。底座通过防尘盖安装孔固定在攻角传感器上,安装时以销孔定位,这样也就保证了电机转动轴与风标转动轴同轴。
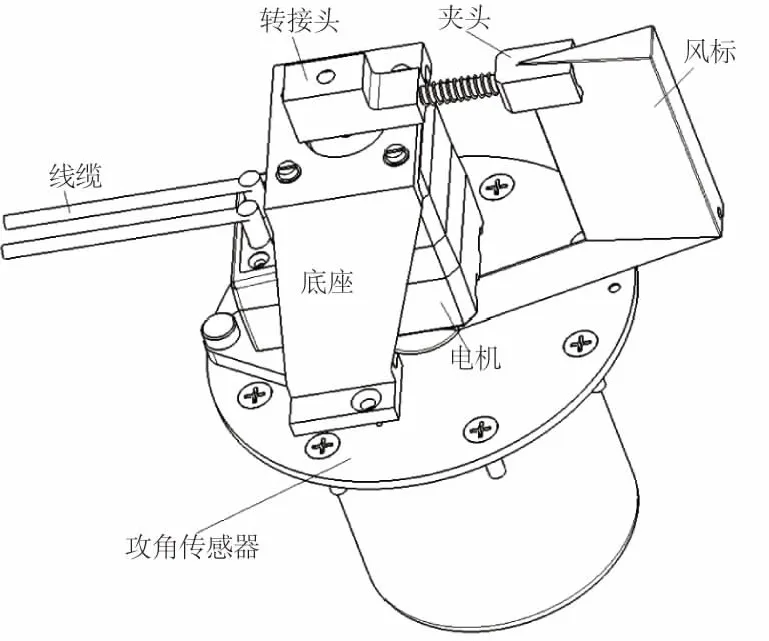
图3 攻角传感器自动调节夹具示意图
2.3 控制器硬件设计
由于现场电磁干扰严重,故选用运行稳定的PLC作为控制器[5]。步进电机采用原厂配套的驱动器SS05-Q-R进行底层的控制[6]。电机驱动器SS05-Q-R与PLC用MODBUS进行通信。图4为控制电路框图。
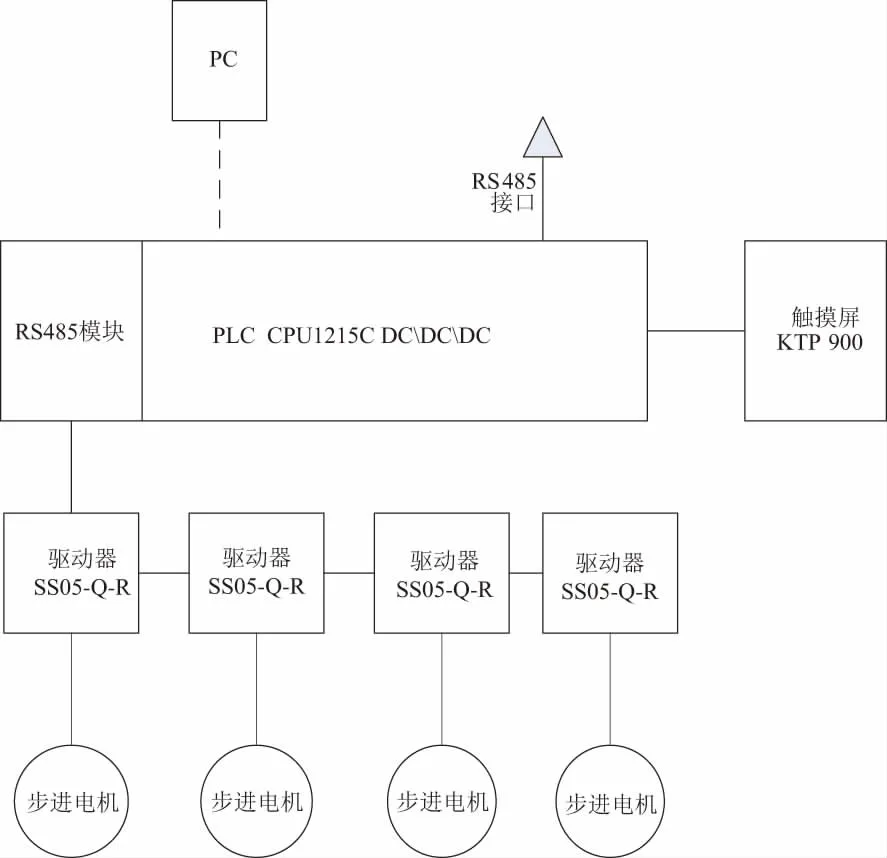
图4 控制电路框图
PLC与驱动器通过RS485模块进行连接,4个驱动器采用串行的连接方式。
2.4 软件以及人机交互界面设计
驱动器通过脉冲控制电机运动,电机运动所转动的角度通过编码器反馈回驱动器。这是物理层的控制,而应用层的控制需要对位移、加速度、减速度、速度等参数进行控制。图5是电机运动的模式。

图5 电机运动模式
加速度是指电机从静止到匀速运动状态的运动加速度;减速度是指电机从匀速运动状态到静止的运动减速度;速度是指电机匀速运动状态的速度;位移是这整个过程的运动角度。这4个参数通过参数设定PLC的MotionParaSet功能模块发送到控制器中,电机运动的触发信号通过Modbus_Master模块发送到控制器中,电机所运动的角度也通过Modbus_Master模块读取到控制器中[7]。
为了方便现场操作,攻角传感器自动调节控制系统需提供几个可视控件和操作控件:角度显示控件、角度设定控件、启动按键、攻角选择按键和复位按键,如图6所示。

图6 软件界面
通过该操作界面,工人可以方便地操作测试设备。界面上提供的操作功能有:进行角度设定,显示角度实际值,角度值复位清零,运动参数下发,运行电机选择、启动,通信连接及复位功能[8]。
3 试验验证
按图3将调节装置安装到攻角传感器上,注意使用销孔保证电机转动轴线与风标转动轴线同轴度;将所有装置控制线缆以及编码器反馈线缆接入控制器中;全机上电,采用测试接口设备读取攻角传感器数值。在正负方向,随机调节几个角度值,如表1所示。
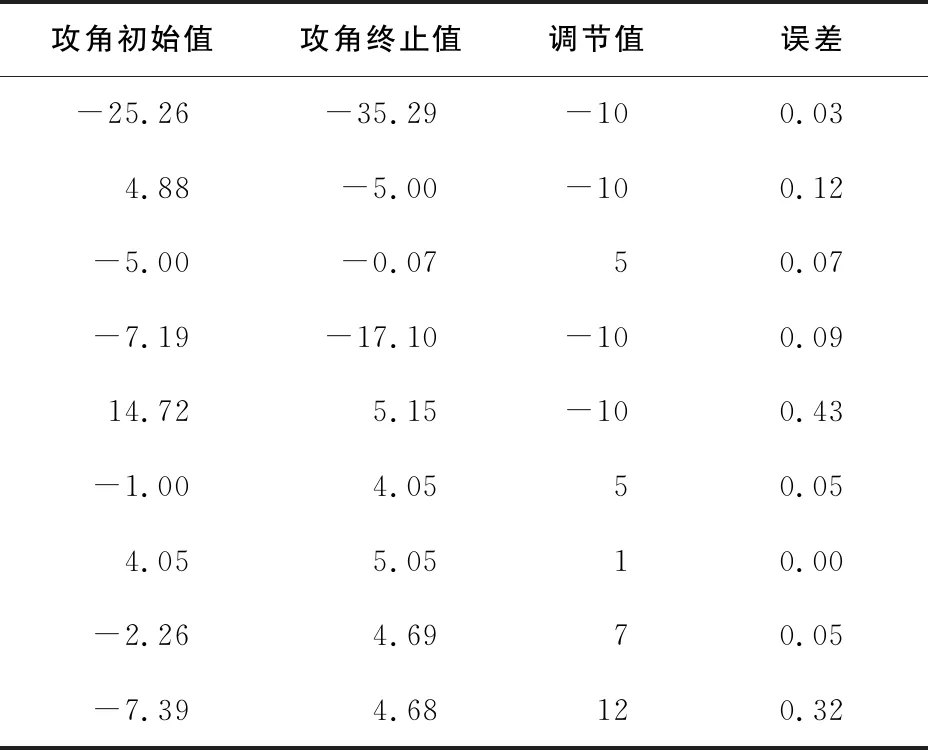
表1 试验数据 单位:(°)
表1中的攻角初始值和终止值是从测试接口设备读取的值,反映的是攻角传感器实际运动的角度;调节值是系统所设定的调节角度,误差是将调节的角度和实际运动的角度相比较得到反应系统控制效果的参数。从表中可见,除个别误差偏大之外,其他误差都很小,且即使误差较大,也在0.5°范围内。
表1是反映单个攻角传感器运动的控制效果,而同步性也是考量本系统的重要性能。将4个传感器都调节到同一个初始角度,然后设置同时调节,向正方向运动30°,采用测试接口设备采集运动过程中的数据,如图7和图8所示。从图中可观察到4条运动曲线的偏差在0.5°范围内,大大满足实际2°的同步需求。

图7 运动同步曲线
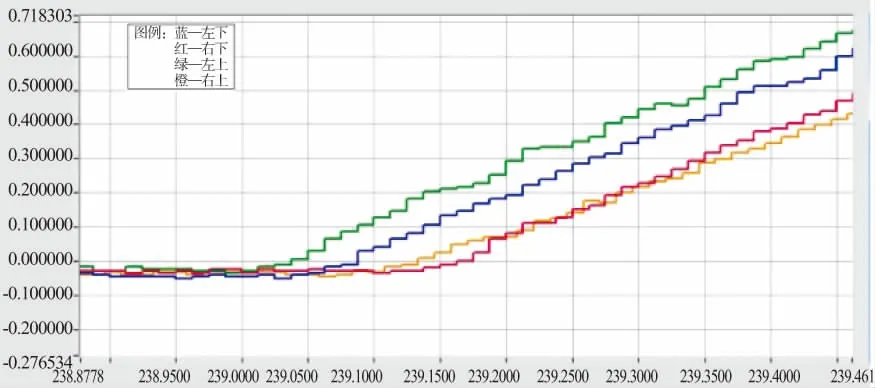
图8 同步曲线局部放大
4 结语
本文研究的攻角传感器自动调节系统,结构简单轻巧,每个攻角调节装置主要含有1个电机、1个电机支座及装夹在风标上的夹头;操作方便,只需选择所需调节的攻角传感器及变化数值即可;并且该系统易于扩展,能够与其他测试系统集成,形成集成测试系统。不同的机型攻角传感器数量不同,攻角传感器的楔形面角度不同,但仅需稍加改动,改变调节装置的夹头V槽角度,增加调节装置,该系统同样可使用。经过试验验证,该系统的单个调节精度和多个同步调节精度都在0.5°范围内,满足现场使用要求。
猜你喜欢
作文小学高年级(2022年3期)2022-04-20
北京航空航天大学学报(2021年6期)2021-07-20
宇航总体技术(2019年5期)2019-10-11
福建中学数学(2018年1期)2018-11-29
北京航空航天大学学报(2017年7期)2017-11-24
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
振动与冲击(2015年2期)2015-05-16
空气动力学学报(2015年3期)2015-04-14
科技传播(2014年4期)2014-12-02