面向小行星微重力环境探测的自恢复直立弹跳机器人设计
2021-08-13 00:29王永滨李雨航顾谢平蒋万松陈金宝黄之峰
宇航学报 2021年6期
王永滨,李雨航,顾谢平,梁 浩,蒋万松,陈金宝,黄之峰
(1. 南京航空航天大学航天学院,南京210016;2. 中国航天科技集团有限公司航天进入减速与着陆技术实验室,北京 100094;3. 北京空间机电研究所,北京100094;4. 广东工业大学自动化学院,广州510006)
0 引 言
随着中国空间探测领域持续扩展,进入深空开展对地外天体的科学研究和探测,势必将带动科学技术进步,促进工业发展,对人类文明产生深远影响。小天体探测是深空探测领域的重要内容,是空间技术发展最活跃的技术领域之一。其成果能够为太阳系的形成及其演化提供线索和依据,并对研究太阳系生命信息与系外行星、研究类地行星与太阳系演化、揭示地球生物起源有重要的指导意义;其上面稀缺物质资源可能成为未来人类开发和利用的宝库。
目前地外天体巡视机器人主要有以下几种:1)摇臂探测车。通过设计悬架构型连接车体与车轮,可以提高在运动中的抗倾翻和越障等性能,适用于火星等地表探测[1]。2)足式探测车。其具有高承载力,落点离散,地面适应能力强,适用于月球等地表探测[2]。3)飞行器。在火星等低大气密度行星上进行大范围探测具有较大优势[3-4]。
但由于小天体附近引力微弱,表面不能提供足够的摩擦力,因此小天体表面巡视器通常采用动量轮驱动或弹跳式方法。前者主要是基于角动量守恒原理,通过在机器人内部的动量飞轮高速旋转所产生的惯性力实现机器人的运动[5]。这种移动方式对机器人落地后的姿态没有太高的要求,但动量轮本身的质量和能耗制约了探测机器人的载荷任务能力,不适合于需要大范围移动的数据采集及探索任务。而弹跳机器人越障、适应复杂地形地貌及有效承载的能力强,易小型化,在行星表面的微重力环境下其移动能力具有明显优势[6],特别适合用作星表探测机器人或子母式探测车的子体探测系统。然而,弹跳机器人要实现高效运动,所面临的挑战有两点:1)如何在每次弹跳落地后,能够重新恢复直立,从而使足底与地面完整接触,实现二次跳跃;2)如何在低能耗的前提下获得可观的弹跳高度。
早在1969年,美国就提出研制跳跃机构用于月球探索机器人,以解决行星探测中探测车在崎岖的地形中活动范围有限的问题[7]。对小行星跳跃探测器研究较早的国家有美国和日本,其中美国国家宇航局(NASA)与加利福尼亚理工学院(CIT)联合研制了一共三代小行星跳跃机器人[8];北京邮电大学的面向月球应用提出一种结构全封闭的球型移动机器人[9];加拿大航天局提出了一种用于星球表面探测器的新型跳跃机构[10]。像Scout机器人[11]和麻省理工学院的微型机器人[12],为了达成压缩弹簧来完成跳跃的目标,这些机器人的机构仅仅是直接让机器人撞击地表来起跳,但是这种方式往往导致弹簧还未完全释放能量机器人便已经离地。也有机器人通过六联杆机械,例如EPFL跳跃机器人解决提前起跳的问题[13-15]。该系列的机器人还利用主动的尾部实现机器人自行恢复直立状态。近年来,随着技术发展,小型的单腿弹跳机器人已能够实现连续不间断的敏捷跳跃,文献[16-17]通过多连杆结构采用电机直驱结合串联弹簧蓄力缓冲的方式实现连续弹跳。研究强调跳跃的敏捷性而非低能耗,单次跳跃蓄能周期为0.1 s,平均消耗能量2 J。与落地后恢复直立的方案不同,该机器人利用了两个风机及动量摆臂实现空中三个自由度的姿态调整。然而,风机的使用使该方案不适用于真空环境。另外一些学者则独辟蹊径,尝试从仿生及材料的角度探索弹跳机器人的实现方案。文献[18]提出了结合扑翼机构以提高了机器人弹跳高度的方法,而文献[19-21]则针对软体机器人利用材料特性分别提出了光驱动方式、化学反应产生爆炸及形状记忆合金等方式实现跳跃。人类对小行星的探测才刚刚起步,截至目前为止,成功实现着陆小行星任务的机器人,仅2018年日本隼鸟2号在龙宫小行星上所释放的MINERVA-II[22-23]以及MASCOT[22]。前者通过内置电机摆动及非电机驱动的弹性单元实现跳跃,后者则是利用摆锤结构实现单次的姿态调整。从公布的信息看,上述机器人尚未能实现在小行星表面的精确跳跃,然而对于完全未知的环境,任意落点均是值得探索的位置,即使是随机非精确跳跃也有其应用价值。
上述研究中提出了各式各样的弹跳机器人系统,根据动力装置的工作方式归结为蓄能形式和直驱形式两种。前者尽管连续弹跳效率较低,但执行器功耗要求较小,更适合于在微重力环境下的小行星上进行探测任务。然而,在上述研究中,多数机器人不具备自行恢复直立状态,或依赖于额外的动力部件实现直立[13-14],从而进行二次跳跃。这一局限性不利于在小行星这种地面结构复杂的环境中进行弹跳。
在本文中,针对上述提到的两个挑战点,提出了一种具有蛋形外壳的并联腿弹跳机器人。利用合理的质心分布,使得机器人在无需其他装置提供动力的情况下,仅依靠重力矩即可实现自行直立。同时,为解决低能耗下的可观弹跳高度问题,本文面向并联腿蓄能结构提出一个完整的弹簧刚度优化计算方法。
本文后续的章节安排如下,第二节介绍弹跳机器人的机构设计方案;第三节通过静力学建模等方式讨论的机器人主要结构参数的影响及优化方法;最后,在第四节中,通过样机实验验证了本文的方案及方法的合理性。
1 机构方案
1.1 机构方案
弹跳机器人实现多次跳跃的关键在于如何保证每次跳跃后能够自行恢复直立。文献[14]采用特殊的主动尾部结构实现弹跳机器人自行恢复直立。然而,额外的主动尾部即耗费能量,又使得机构过于复杂,不利于小行星这种苛刻的环境。
根据机械能守恒的原理可以知道,不管是基于减速电机带动摆臂支撑实现恢复直立,还是动量飞轮方案,恢复直立所消耗的能量最小不低于恢复过程中,质心高度变化所克服的重力势能Eg=mgh,其中m为探测器质量、g为重力系数、h为质心的变化高度差。为了节省这一部分的能量消耗,本文在并联腿结构的基础上,设计了一个蛋形外壳,利用不倒翁原理,使得机器人能够在收腿准备二次跳跃的过程中,通过重力矩作用自行恢复直立状态(见图1)。相比于本方案仅仅是改变外壳形状获得的恢复直立能力,其他的主动运动装置恢复直立方案均需要使用到电机及其他相关的传动机构,在零件,结构及控制上都要更加复杂,在一定程度上会增加整个系统的复杂程度,进而影响可靠性。

图1 机器人收腿过程中利用重力矩恢复直立Fig.1 Robot legs during use of the weight moment of the upright recovery
机器人整体机构设计如图2所示。整个蛋形外壳由上壳、中壳及底壳,三部分组成。其中,上壳带有镂空结构,用于安装传感器观察窗及太阳能电池板;中壳为载荷舱,用于固定并联腿机构及电池等质量较重的设备;底壳用于支撑。为了实现机器人收腿过程中的自恢复直立能力,以机器人质心为圆心的最小内切圆必须满足切点在底壳中心的条件。图2(b)展示了机器人的这一质量布局。此外,图2(b)还展示了整个弹跳机器人的内部空间,可以看到,除了并联腿外还有大量空间可以用于安装任务载荷。

图2 弹跳机器人机构设计方案Fig.2 Design scheme of bouncing robot mechanism
并联腿结构[13]由四个长度相同的连杆组成,其中上下4个关节处各安装有两个扭簧。并联腿的折叠通过收卷轮拉动连接底部支架实现。收卷轮由减速电机带动。其中在最后一级的传动中,带动收卷轮的末级齿轮设计有缺齿结构。当未达到缺齿位置时,电机带动收卷轮转动并拉动连接底部支架的绳子,实现并联腿的折叠。此时弹性势能通过并联腿对扭簧的压缩存储在关节处。当齿轮转动到缺齿位置时,收卷轮将被瞬间释放,从而并联腿关节处存储的弹性势能快速释放,实现起跳。
2 结构参数分析及优化设计
由于小行星带间存在的互相遮挡,使得有效利用太阳能充电的环境条件恶劣,定期利用太阳能板充电的条件不能很好的保证。因此,小行星环境探测的首要问题是如何降低机器人运动过程中的能耗,从而增加续航时间并使得更多的能量用于传感器及通讯等设备的探测任务。弹跳机器人运动过程中的能耗受诸多因素的影响,在有限的能耗条件下,既要考虑电机拉动弹簧进行蓄能的效率,又要考虑弹跳高度以及运动部件的质量分配。本部分首先从静力学的角度分析并联腿弹跳机构的受力情况,在此基础上通过双质量弹簧模型讨论弹跳高度的估算,最后结合上述条件,提出对弹跳机器人的弹簧刚度及结构参数的优化设计方法。
2.1 静力学模型
弹跳机器人考虑由单个电机提供转动能量实现弹簧蓄能,因此,获得压缩弹簧过程中所需最大的拉力可以为接下来的参数选择提供设计依据。如图3所示,电机经过减速后利用收卷轮产生拉力拉动连接并联腿底部支架的卷绳,实现对弹簧的压缩。因此,静力分析中着重于弹簧在竖直方向上的合力计算。
如图3所示,并联腿的上下四个关节装有完全相同的扭簧,其中每个关节安装有两个扭簧。为了方便结构零件的替换,并联腿采用完全对称的结构进行设计。

图3 机器人受力分析Fig.3 Robot force analysis
根据机器人的对称结构,文献[15]的静力分析结果可以进一步简化为下式:
(1)
其中,F代表卷绳的拉力,L表示并联腿的腿长,θ是并联腿当前的偏转角度,θ0是扭簧的在未受力的情况下的初始角度,k为弹簧的刚度系数,n是关节处安装的弹簧的总数,如上文所述,在本文中n= 2。注意,这里的拉力F需要大于等于扭簧在竖直方向上的合力,才能刚好保持平衡或者以缓慢的速度上来实现压缩。
根据式(1)给出的关系式,图4给出了扭簧在竖直方向上的合力F与机构上并联腿的θ角之间的关系算例。其中,扭簧刚度k取18.5 N·m/(°),并联腿偏转角度的取值区间在(0, 90) 之间。从图4可以看出,尽管是非线性的关系,拉力F随着角度的增加而减小。结果中需要注意扭簧自然张开下的初始角度θ0,对关系曲线的影响。当其小于等于90°时,拉力随着角度增大而单调减小,即使是到达并联腿死点90°处,由于此时扭簧的扭矩已经为零,F不会出现突然增大或无穷大的情况;然而,当θ0大于90°时,拉力在将在角度增大到一定程度的时候突然快速增加并达到无穷大,这是由于随着角度增加力臂变小到接近于零,而在死点处扭簧扭矩不为零。此外,由给出的算例关系亦可知道,在刚度不变的情况下增加并联腿的长度有利于减小所需的拉力。

图4 并联腿角度与竖直方向合力的关系Fig.4 Parallel leg angle to the vertical direction force relationship
综上所述,从上面的分析可以得出两点结论:1)结构应选择初始角度小于或等于90°的扭簧,从而避免在接近死点角度的位置产生过大的拉力。2)核算电机扭矩是否满足收卷蓄能要求主要看并联腿最大压缩角处产生的竖直方向合力。
2.2 起跳高度分析
理想情况下,并联腿结构的起跳过程可以简化为由双质量块弹簧模型。弹性势能存储于两个质量块中间的弹簧内,其中上质量块对应机器人的载荷,外壳及并联腿上半部分,下质量块对应并联腿的下半部分及脚掌。弹性势能的释放过程分为两个阶段:1)势能全部转为上质量块的动能和重力势能;2)当弹簧恢复原长或释放完毕,上质量块与下质量块发生完全非弹性碰撞,两者速度瞬间达到一致并继续运动,直到所有动能转换为重力势能即到达最高点。
起跳高度可以通过下式进行估算。
(2)
其中,
(3)
进一步简化得:
(4)
式中:H为最终弹跳高度,E0为存储的弹性势能,η为弹性势能的转换效率,主要取决于载荷质量与并联腿质量之间的比值以及关节内可能的摩擦损耗,根据动量守恒及能量守恒定律可知,上质量块与下质量块的比值越大,转换效率越高。k为弹簧的弹性系数,θ1为并联腿伸展时的角度,θ2为并联腿被压缩时的最大角度,Δθ为两者之差。
由上式分析可知,在刚度以及能量转换效率一定的情况下,压缩角度差越大弹跳高度越大。
2.3 结构参数优化
结合上述分析可以看到,弹跳机器人设计过程中,需要平衡诸多参数之间的相互影响。弹跳的高度依赖于更高刚度的弹簧和压缩角度,然而这需要功率更大的电机、对于减轻重量、减小蓄能周期和能耗不利。为了减少功耗,腾出更多的任务载荷,需要在较小的电机功率的情况下,选择合适的弹簧和结构参数以实现最大的跳跃高度。
因此,在本节中结合前面两节的结论以及本文中的机构设计方案特点,给出如下的多参数优化方法。优化问题定义为,给定电机扭矩的条件下如何选取弹簧刚度及结构参数,实现最大跳跃高度。问题如下式(5)-(11)所示,
(5)
约束条件:
(6)
(7)
θ1-θ2≥0
(8)
0≤θ1≤θ0
(9)
L>0
(10)
R>0
(11)
其中,约束条件1,不等式(6)描述的是静力平衡约束,即扭簧在竖直方向合力要小于等于电机在收卷轮上面产生能够产生的最大拉力。根据式(4),增大弹簧刚度和压缩角度差Δθ都有利于提高弹跳高度,但由于静力平衡约束条件,两者之间存在制衡,如果刚度太大,则在电机扭矩一定的条件下只能减小压缩角度。
约束条件2,等式(7),描述的是收卷轮卷线的几何约束关系。本文的机构利用带有缺齿结构的收卷轮卷动绳子实现对并联腿的压缩(2.2节)。由于缺齿结构的存在,收卷轮转动的角度α小于2π。该约束意味着,给定目标压缩角度以α角度的约束。反之收卷轮半径给定的情况下,如果,腿长过长,则无法实现目标的压缩角度。
其他不等式(8)~(11)则分别是各参数的上下限约束。
约束条件1和约束条件2相互关联,在扭矩一定的条件下,减小收卷轮半径可以增大拉力,从而选用更大的刚度,但是半径的大小受到几何约束的限制,太小则无法实现对并联腿的完整压缩。
本文中采用了二次序列规划方法(SQP)对上述问题进行求解。根据2.2节中的机构设计参数,进行计算求解最佳跳跃高度所对应的刚度系数、最大压缩角以及收卷轮半径。
计算结果如图5所示,在收卷电机扭矩给定的条件下,弹跳高度主要取决于允许的最大压缩角度差Δθ,角度越大,实际上能弹跳的高度越小。在高度极限条件下所需要的刚度也越小。图中还可以看出,初始压缩角度θ1对于弹跳高度的影响,同样的压缩角度条件下,初始压缩角度越大,则允许起跳高度则越高。
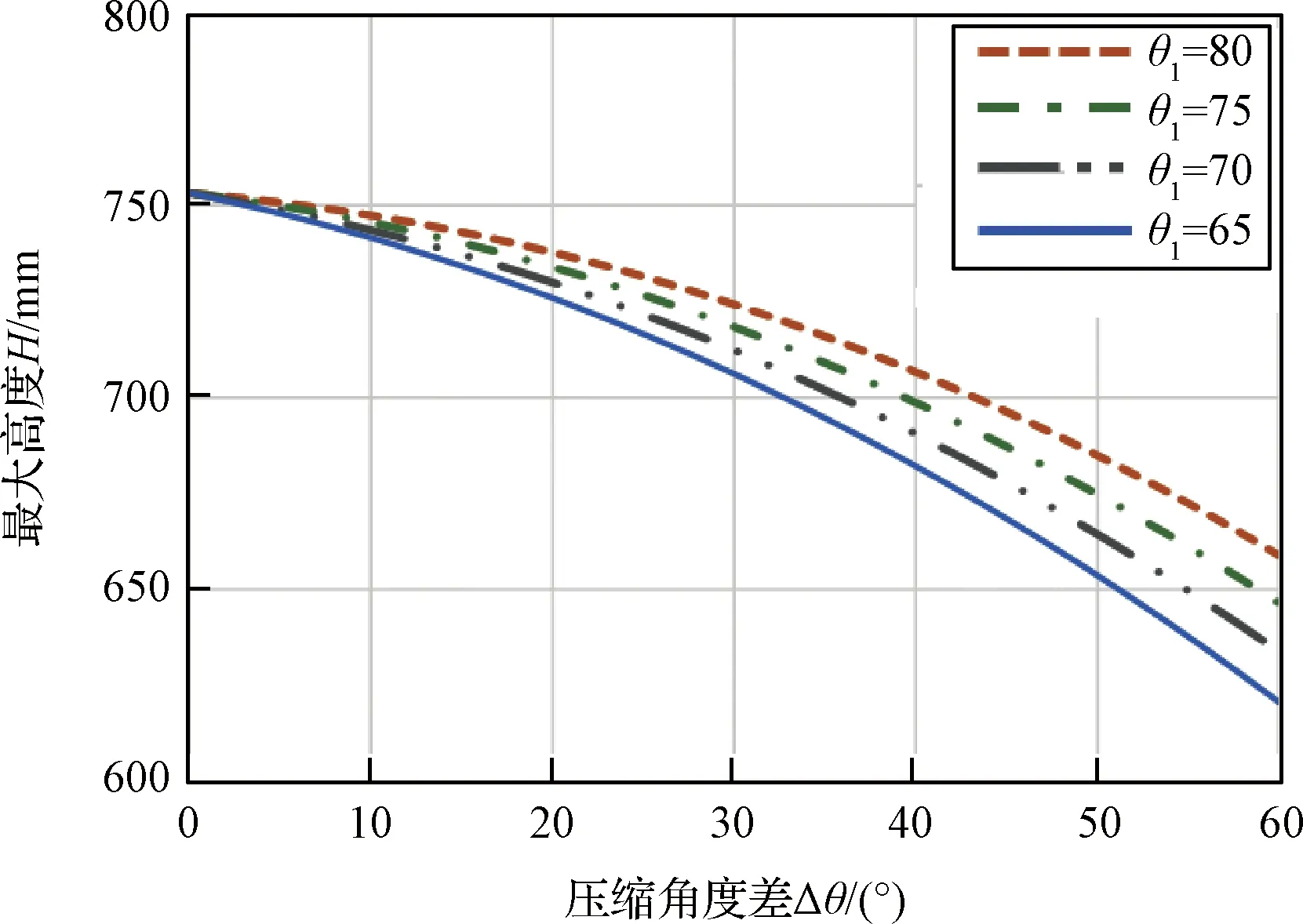
图5 压缩角度差与允许弹跳高度的关系Fig.5 Angle difference relationship between height and bounce allows compression
尽管小的压缩角度有利于提高跳跃高度,但是过高的弹簧刚度在工程上难以实现,同时,对于电机收卷轮和减速比的要求太过苛刻。图6和图7给出了算例中,不同压缩角度差下,对应最大高度所需的刚度。从图中可以看出,随着压缩角度差的增大,刚度系数快速递减。

图6 压缩角度差与满足最大高度的弹簧刚度关系Fig.6 Angle difference relationship between height and bounce allows compression

图7 压缩角度差与满足最大高度的弹簧刚度关系局部放大图Fig.7 Compression meet the maximum angular difference and the spring constant height relationship enlarged view
3 样机实验
实验选取了硬质瓷砖及沙石两种地面,验证机器人的实际弹跳高度以及落地后在收腿过程中的自恢复直立能力。实验开始时,机器人均处于伸腿卧倒状态。实验开始后,机器人在收卷电机的作用下逐渐收腿,并利用重力矩恢复直立(图8(a~f),图9(a~d))。在恢复直立瞬间,由于缺齿结构的作用,弹性势能释放,实现跳跃(图8(g~j),图9(e~i))。此后,机器人重新落地,并重复前面的动作,再次实现起跳。机器人的跳跃高度约300 mm左右,沙土地面略低于瓷砖地面。

图8 机器人在硬质瓷砖地面实现自恢复直立及二次弹跳Fig.8 Robot achieves self-recovery upright and secondary bounce on hard ceramic plane

图9 机器人在沙石地面实现自恢复直立及二次弹跳效果Fig.9 Robot achieves self-recovery upright and secondary bounce on sand and gravel ground
为检验机构方案的实际效果,包括自恢复直立多次弹跳以及弹跳高度,本研究通过3D打印手段制作了原理样机进行实验验证。其中,并联腿结构整体采用ABS材料制作,保证强度的同时具有一定的韧性;外壳则采用PLA材料打印,具有更高的强度以应对落地产生的冲击。机器人的主要设计参数依据前文的理论推导作为依据进行计算选型,如表1所示。
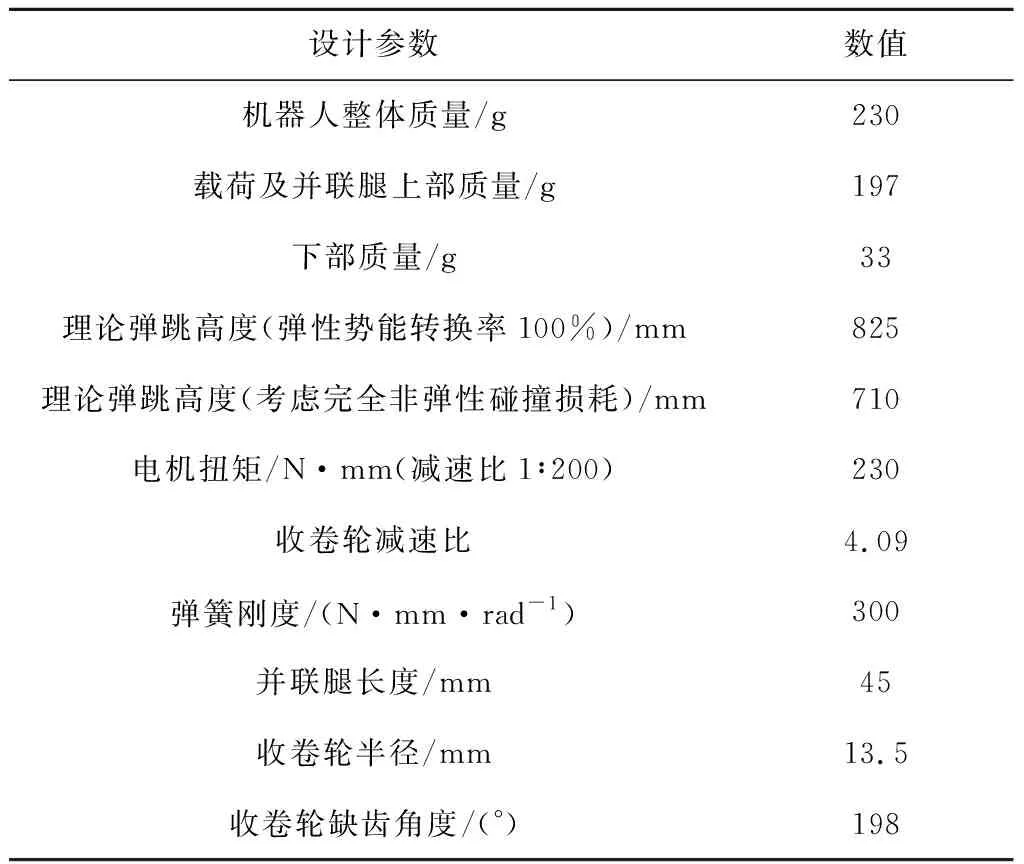
表1 弹跳机器人主要设计参数Table 1 Main design parameter of the jumping robot
机器人单次跳跃蓄能周期为2 s左右,电机供电电压3.7 V,电流80 mA,消耗能量约为0.59 J,约为文献[16]的30%。
实验结果有效地验证了机器人机构设计方案的有效性,机器人能够在平整地面(瓷砖)及非平整地面(沙石)上实现不依赖额外动力机构的条件下自恢复直立,并实现重复起跳,表现出了较好的环境适应能力。
从实验结果看,机器人的弹跳高度并未达到双质量块弹簧模型所计算的理论高度,仅为实际计算值的42%。原因有如下几点:1)双质量弹簧模型仅仅是对机器人的近似,两者并不完全一直,起跳过程中的非完全弹性碰撞损耗实际更大;2)机器人本身各个关节的铰链存在一定的摩擦损耗。上述问题和原因有待在接下来的研究中进行分析和探究。
通过样机实验还可以发现,机器人的跳跃落点分布呈现一定的随机性。这主要受两个因素的影响。1)机器人起跳前并未完全直立静止,且存在一定的摆动速度,因此会导致起跳时存在一个水平的速度和自转;2)由于地面存在一定的非平整性,例如实验中的沙土地面,机器人并未完整恢复直立而是略有倾斜。尽管落点随机,结合目前已登陆小行星的探测机器人的任务执行情况看,由于小行星是完全未知的环境,任意位置都是值得探索的地方,即使是跳跃的落点随机分布,其对初期探测依旧是有意义的。
定点定向跳跃是实施更加复杂、精确的地外探测任务的重要功能。然而,如何在复杂且崎岖的地形中实现定点定向跳跃是一个复杂的多因素问题,与地形、地质、机器人本身的结构,空中的姿态控制以及落地后的起跳调整都存在联系。即使是参考先前研究,通过增加质量摆锤的方法也并不能很好地解决。这一问题将在今后的进一步研究中继续展开。
此外,考虑到弹跳时,岩石可能会卡入底座与蛋壳之间的缝隙,在今后的工程样机设计中将考虑增加外壳密封的柔性防护网等方法。
4 结 论
本文以小行星探测为背景,提出了一种具有蛋形外壳,能够自恢复直立能力的并联腿弹跳机器人。研究通过理论分析给出了结构参数之间的约束关系和弹簧刚度的计算方法。在实际样机实验中,有效地验证了设计的有效性及优化计算方法的可行性。得出如下结论。
1) 方案所提出的蛋形外壳方案,能够实现机器人在无需额外动力装置的条件下自行恢复直立,从而使得多次跳跃成为可能。
2) 针对弹簧刚度及结构参数的优化方法,能够有效优化并联腿弹跳机器人的结构及可跳跃的最大高度。
猜你喜欢
今日农业(2022年2期)2022-11-16
北京航空航天大学学报(2022年7期)2022-08-06
模具制造(2022年1期)2022-02-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
小哥白尼·趣味科学画报(2019年12期)2019-02-28
电机与控制学报(2018年9期)2018-05-14
新高考·高一物理(2016年10期)2017-07-07
科普童话·百科探秘(2014年1期)2014-01-13
小雪花·初中高分作文(2009年7期)2009-11-16
中学生数理化·高一版(2008年12期)2008-06-15