
基于PLC的蜘蛛式高空作业车电气控制系统
2021-08-09 19:52高勇
粘接 2021年6期
关键词:电气控制系统
高勇
摘 要:在建筑、设备安装等需要高空作业的领域中使用高空作业车非常重要。如今随着高空作业车的频繁使用,其种类越来越多,其中蜘蛛式高空作业车具有优异的性能,如操作方便、灵活性好、工作区间大等,所以在实际生产和生活中使用频繁。蜘蛛式高空作业车需要具备非常高的安全性和稳定性,其中电气控制系统直接决定着高空作业车的稳定运行状况,所以对电气控制系统进行设计时需要考虑到其安全性和可靠性。PLC属于一种比较理想的控制器,于是文章设计了基于PLC的蜘蛛式高空作业车电气控制系统,该系统有助于提高蜘蛛式高空作业车的安全性。
关键词:PLC;高空作业车;电气控制系统;蜘蛛式
中图分类号:TH211+.6 文献标识码:A 文章编号:1001-5922(2021)06-0089-05
Abstract:It is very important to use aerial work trucks in fields that require aerial work such as construction and equipment installation. Nowadays, with the frequent use of aerial work vehicles, there are more and more types of them. Among them, spider aerial work vehicles have excellent performance, such as easy operation, good flexibility, and large working areas, so they are frequently used in actual production and life. Spider-type aerial work vehicles need to have very high safety and stability. The electrical control system directly determines the stable operating conditions of the aerial work vehicles. Therefore, the safety and reliability of the electrical control system must be considered when designing the electrical control system. PLC is a kind of ideal controller, so the paper designs a spider-type aerial work vehicle electrical control system based on PLC, which helps to improve the safety of the spider-type aerial work vehicle.
Key words:PLC; aerial work vehicle; electrical control system; spider
高空作業车的形式种类比较多,比如蜘蛛式、双桅柱式、单桅柱式、臂架式等,这些种类中蜘蛛式高空作业车性能较好,使用方便,因为该高空作业车有4条支腿放置在地面,该形状正好类似于蜘蛛腿,所以将其命名为蜘蛛式高空作业车[1-2]。蜘蛛式高空作业车不仅具有较为优美的外观,而且具有很好的灵活机动性、操作方便、工作区间大、安全可靠性高等优势,所以在实际生产和生活中应用比较多[3-4]。但是这种类型的高空作业车在国外应用更加广泛,比如在建筑施工、制船、设备安装等领域。因为我国使用的大高度作业车以进口方式为主,所以在一定程度上降低了蜘蛛式高空作业车的使用范围。高空作业车与其他工程机械有着很大的区别,高空作业车的负荷比较小,而且作业频率也比较少,但是由于是在高空作业,对其可靠性和安全性要求非常高,需要保证蜘蛛式高空作业车的每个组成部分具有非常可靠的性质,在保证机械和液压系统安全稳定的基础之上,电气控制系统在高空作业车中也相当重要,如果电气控制系统出现问题,就会导致整个高空作业车无法工作,甚至会造成人身安全问题[5-6]。所以文章将主要对其电气控制系统进行深入研究,该系统中使用PLC控制系统。
1 蜘蛛式高空作业车工作原理
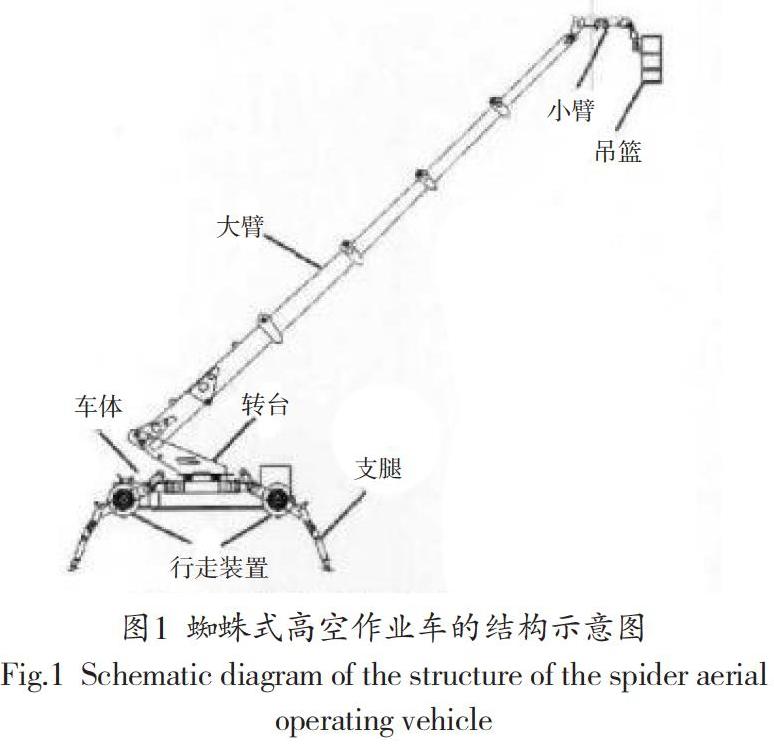
蜘蛛式高空作业车的结构相对比较简单,如图1所示,可以将该结构分为两个部分,一个部分属于下车部分,主要包含支腿、转台、行走装置和底盘组成,另外一个部分就是上车部分,该部分主要包含大小臂和吊篮组成。蜘蛛式高空作业车结构看似简单,但是能够完成很多作业动作,比如支腿调节、大小臂变幅、转向、行走、大臂收缩、吊篮旋转、转台回转和吊篮调平等。所以使用蜘蛛式高空作业车进行高作作业,将会具有非常大的灵活性,能够根据实际要求在高空中完成各种动作要求。
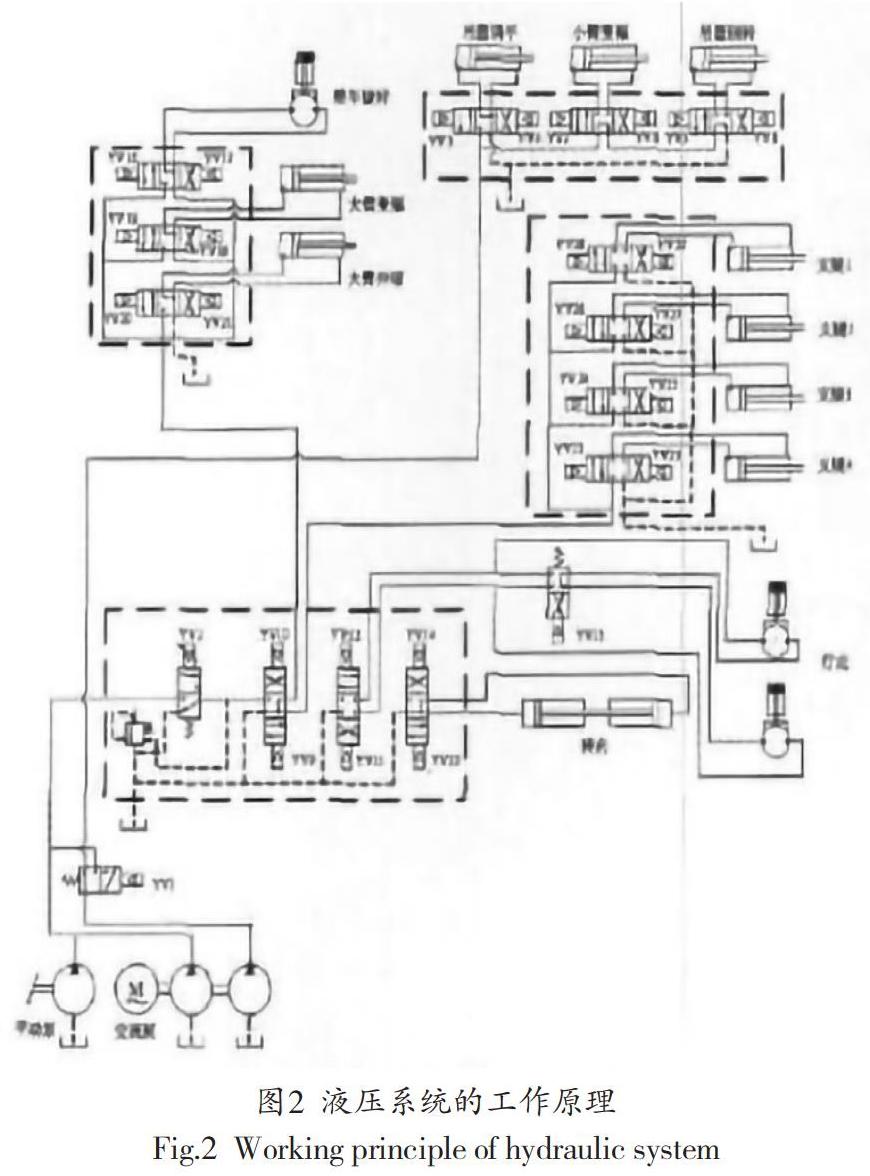
蜘蛛式高空作业车的液压系统如图2所示,该系统中提供动力部分就是交流电机,通过使用交流电机和控制阀,液压油的速度、流向和流量才能够得以改变和控制,才能够推动液压缸做成相应的动作,蜘蛛式高空作业车才能够完成不同的动作需求。
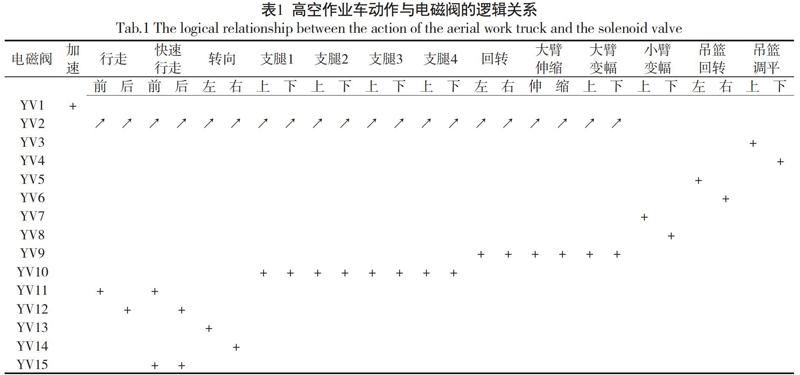
表1列举了部分不同动作与阀之间的逻辑关系,表中的+号代表的是电磁阀得到电,箭头表示的是比例调节阀工作。将YV2作为比例阀,然后通过其对系统流量进行调节,可以对动作速度进行改变,此时有一些动作:
当YV10得到电时,能够操作上车动作。包含大臂上下变幅、伸缩和转台左右旋转。
当YV9得到电时,可以调节支腿,即对四个支腿进行打开或者收回操作
可以控制YV11/YV12对蜘蛛式高空作业车的方向进行调整,比如操控车向前或者向后进行运动,然后为了调整速度,控制YV15实现串并转换即可调整速度快慢。
控制YV13/YV14即可实现蜘蛛式高空作业车的左右移动。
上述动作开可以进行加快处理,即使得电池阀YV1得电,从而双泵合流就可以提高动作速度。当YV1处于失电状态时,控制YV7、YV8即可实现小臂的上下变幅,控制YV3、YV4即可实现吊篮调平,控制YV5、YV6即可实现吊篮的旋转,比如逆时针旋转或者顺时针旋转。
旋转操作。当蜘蛛式高空作业车处于水平状态时,对转台进行操作就可以使得上车部分进行旋转运动,然后高空作业车的4个支腿也可以进行调节,并且每个支腿之间是相互独立的,可以实现单个进行调整。
行走操作。进行该动作操纵时,需要将支腿收回,然后将大臂完全落下。工作臂的动作有大臂伸缩和变幅,小臂下降和升高。为了安全操作,一般规定工作臂的活动范围会受到一定的限制,即要满足其工作曲线的限制,如图3所示。
吊篮操作。吊篮的主要动作有回转和调平,由于吊篮属于工人的工作位置,所以需要保持吊篮的水平,并且吊篮强度有限,不能承载过重的物质,所以为了提高高空作业车的安全性,在吊篮的底部安装称重传感器和水平/倾斜角传感器,当传感器监测到吊篮的倾斜角超过了5°或者超载,则会自动停止高空作业车的所有动作。当倾斜角小于1.5°大于1°时,高空作业车会自动对吊篮进行调整。
2 蜘蛛式高空作业车电气控制系统设计
通过上文对蜘蛛式高空作业车的工作原理分析,然后再其电气控制系统进行设计,该作业车的电源采用220V交流电源。电气控制系统主要为液压系统提供动力,然后实现各种动作的操控调节、极限位置报警、发动机停启操作等功能。
2.1 控制台
在设计电气控制系统时,为了提高蜘蛛式高空作业车的安全性和可操作性,设计了3个控制台,分别为本车控制、远程控制和吊篮控制,下面将对3个控制台进行具体分析设计。
(1)本机控制安装在高空作业车车体上,主要作用在于控制高空作业车的开启、控制吊篮的调平等,当高空作业车运行出现问题时还会出现在自动报警指示。该控制台设置了一些功能按钮,比如急停、启动、控制选择、远程等。主要方便高空作业车下面的人员进行操控。
(2)吊篮控制安装在吊篮上。主要方便在吊篮上的工作人员能够随时对高空作业车进行控制。吊篮控制主要的功能有大臂变幅和伸缩、小臂变幅、转台会转、吊篮调平等,当然考虑到安全吊篮控制上设置了急停按钮还有状态报警,当吊篮发生倾斜或者其他不符合规范的情况出现时,系统就会自动报警,然后停止工作。
(3)远程控制主要方便距离高空作业车比较远的人员对其进行操控。所以远程控制属于一个独立个体,主要由一个能够移动的便携式操控盒进行实现。远程控制的主要作用在于对支腿动作和高空作业车行走进行控制,当然还会设置了急停、报警指示等功能。这3个控制台不能同时进行工作,不然会造成指令混乱等现象,所以只能使其中一个控制台出于操作状态。
2.2 安全保护装置
因为高空作业车的安全性能要求非常高,所以在设计电气控制系统,也需要做好相关的安全保护装置。首先需要保证支腿的安全性,在每个支腿上安装一个压力传感器和微动开关,检测支腿是否空撑和失衡,然后再作出一些控制或者预警处理,从而保证高空作业车的在运作过程中的安全性。
在大臂上设置长度/角度传感器,目的在于测量大臂的伸出长度和仰角,如果在工作过程中发现大臂曲线超过规范要求,系统将会自定关闭吊篮和大臂,使之停止工作。问了增加蜘蛛式高空作业车的安全性,使用冗余的2路长度/角度传感器。
在设计过程中使用电液自动调平系統,系统能够自行处理某些小问题,比如上文已经提到过的吊篮在某一个倾斜角度时能够自行处理或者发出报警信号,并且当吊篮出现倾斜度较大时,可以手动对其进行一定的调整,然后使其满足系统自动调平的范围,这样系统就可以执行自动调整工作,有助于保持吊篮的水平状态,提高工作安全性。
另外,电气控制系统还需要对高空作业车的工作状态进行检测,从而防止出现各种问题。所以需要设置如下检测单元:在蜘蛛式高空作业车车体上设置一个双轴倾角传感器,在每个支腿上分别设置一个微动开关和压力传感器;两个行程开关,分别检测转台对中情况、大臂收回落下情况;大臂伸出量和角度也需要使用一个传感器进行控制;在吊篮上还需要设置超声波传感器,防止碰撞,设置一个称重传感器,防止吊篮超重。由于高空作业车的安全性非常高,需要系统能够对异常状态进行检测和报警,所以在对电气控制系统进行设计时,可以有以下措施进行实施:
(1)系统设置了3个操控面板,在每个上面都设置报警器和急停按钮,如果发现或者检测到高空作业车存在异常情况,则可以立即停止运动和操作。
(2)当检测到蜘蛛式高空作业车的底盘没有平衡时,即高空作业车不稳定则发出报警并停止运动。
(3)当检测当支腿上的压力不平衡或者没有完全放置到地面时,那个支腿出现问题,则相应的指示灯会出现预警反应。
(4)当检测到大臂幅度超过规范要求时,则报警并停止运作。
(5)当检测到高空作业车的下车部分没有保持水平状态时,此时上车部分也不能进行工作。
(6)当检测到吊篮和其他物体非常接近快要碰撞时,则会发出报警并停止上车部分运动。
(7)当检测到吊篮超重时,则发出预警并停止吊篮工作。
2.3 整机控制系统
通过上述内容的分析,系统需要设置的检测开关总量为47个,需要的输出开关总量为33个,然后还需要设置检测的模拟量为5路。文章基于PLC设计高空作业车的电气控制系统,选择性能较好的西门子PLC作为控制核心。其型号为S7-200,这种PLC属于小型的类型,但是其结构非常紧凑,具有很好的性价比和扩展性,可以说在小型控制工程中,该类型的PLC是一种比较理想的控制器[7-8]。通过上文对蜘蛛式高空作业车电气控制系统的分析,PLC控制器的配置如下所示:选择CPU226作为CPU单元,包含着16个开关量输出和24个开关量输入;2块EM231模拟量输入扩展模块;3块EM221开关量扩展模块等。只有配置较为合适的PLC控制器才有助于电气控制系统的安全和高效运行。如图4所示。
图4即为蜘蛛式高空作业车电气控制系统的原理图。在设计过程中,为了增加电气控制系统的安全性,通过PLC控制的所有动作都会有相应的限定条件,从而能够及时阻止高空作业车的运行状态。另外,操作面板上的各种操控信号都需要引入PLC控制器,并且将这些信号受到逻辑运算的影响,从而可以将硬件和软件之间有一种相互制约的关系,从而可以提高高空作业车的安全性,避免出现操作错误而造成的安全事故。图5即为控制软件的流程图。
3 结语
蜘蛛式高空作业车在生产和生活中具备多种用途,并且具有灵活的操作性和广泛的操作面,所以在实际应用中比较受欢迎。文章通过对蜘蛛式高空作业车的工作原理进行分析,使用PLC作为电气控制系统的控制核心,使用冗余设计,并且基于安全性设计硬件和控制软件,使得蜘蛛式高空作业车能够在安全稳定的运行情况下实现各种动作,能够满足实际的功能需求。
参考文献
[1]蒙树立,熊静琪,吕志刚.折叠式高空作业车臂架系统的动力学建模[J].噪声与振动控制,2012(04):63-67.
[2]夏德茂,马军星,王进,等.PT25蜘蛛式高空作业平台车架有限元分析[J].建筑机械化,2011,32(01):47-49.
[3]李淮,李柯.两种蜘蛛式高空作业车回转平台结构与工艺的成本控制[J].工程机械,2011(09):31-34.
[4]黄林刚.高大空间作业平台电液系统分析研究[D].西安:长安大学,2011.
[5]夏秀峰.浅谈我国高空作业车发展[J].建筑机械化,2010(09):32-34.
[6]黄桂芬,陈铭年.我国高空作业车研究进展综述[J].机电技术,2012,35(001):2-5.
[7]张宇.电加热器的模糊控制及其PLC实现[D].南昌:南昌大学,2005.
[8]黄雪锋,张绍坤,王国锋.中国小型PLC市场的发展之道[J].自动化博览,2009,26(012):42-45.
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
电子技术与软件工程(2016年22期)2016-12-26
