
小型地面机器人链路通信距离测试方法设计
2021-08-06 06:25:08李建中任国全胡敬坤
火力与指挥控制 2021年6期
谢 辉,李建中,任国全,胡敬坤
(1.陆军工程大学石家庄校区,石家庄 050003;2.中国华阴兵器试验中心,陕西 华阴 714200)
0 引言
小型地面机器人可广泛应用于复杂地形地貌环境下的区域搜索、检测和目标搜寻,常常采用无线链路通信方式,实现移动平台与控制终端之间的双向信息交互。在进行小型地面机器人综合性能评定时,其无线链路通信距离也是一项重要性能指标,美军在地面无人车辆试验规程中规定,必须进行视距和非视距条件下的通信距离测试[1]。而目前国内关于无人装备无线链路通信距离的测试方法只在文献[2]中有提及,主要采用模拟拉距法、有线拉距法和现场实测法3 种方式,这些方法均未考虑无线链路近地传播的工作特点,和复杂地形地貌下各种遮挡和反射引起的多径衰落,因此,无法为复杂环境下小型地面机器人链路通信能力的测评提供方法支撑。
1 传统链路通信距离测试方法分析
通信距离是表征机器人系统在规定环境条件下无线链路保持稳定工作的重要性能指标之一。GJB5200-2003《无人机遥控遥测系统通用规范》中对无线链路最大通信距离测试方法进行了规范,其中模拟拉距法和有线拉距法均以自由空间中无线电传播模型为设计依据,具体分析如下。
1.1 模拟拉距法
该方法是在无线链路收发天线的一端设置步进式信号衰减器,通过在近距离r0处正常收发无线链路信号,测得其路径损耗最大允许值A测,最后将A测与由式(1)计算的衰减量Amax进行比较,也可通过式(2)计算出模拟测试得到的Rmax。依据测试和计算结果,评定被测链路最大通信距离是否达到指标要求,当A测≥Amax或Rmax≥R0时判定为合格。

其中,R0为技术指标规定的最大通信距离,r0为链路收发天线之间的距离。
1.2 有线拉距法
该方法通过在收发天线两端端口设置固定信号衰减器A线(模拟线损)和步进信号衰减器A预,并将两端有线连接形成信号闭环,通过测试得到最大衰减量A测,并将所测值与最大通信距离等效衰减量Amax进行比较评定。测试时步进信号衰减器按式(3)计算预置值。

其中,Pt为发射功率,Sr为接收灵敏度。
1.3 现场实测法
该方法是将在正常工作(飞行)条件下测控链路可靠通信的最大有效距离Rmax,与指标规定的最大通信距离R0进行比较评定。
1.4 存在问题分析
比较上述3 种测试方法可以看出,传统链路通信距离测试方法,主要采用自由空间传播模型进行传播距离和路径损耗的等效换算,这种方法对于无人机测控链路地空传播方式基本适用,但在地面机器人测控链路通信距离测试时存在以下两方面问题:
1)传播损耗模型不通用。自由空间传播模型默认路径损耗衰减速率因子n=2,地面机器人测控链路属于近地传播无线信道,受植被、地形、建筑物遮挡和地面多径效应影响,信号衰落严重[3],通常情况下路径损耗衰减速率因子n>2,因此,不能采用自由空间传播模型进行表征;
2)路径损耗衰减影响程度不明确。自由空间传播模型不考虑复杂地表环境对路径损耗的影响,实测法虽然引入了地形、地貌、地物等影响因素,但无法通过测试数据提取表征环境影响程度的衰减速率因子n,也就很难保证测试结果的一致性和可复现性。
2 机器人链路通信环境与RF 传播损耗模型分析
2.1 机器人链路通信环境特点
小型地面机器人链路通信的收发天线高度低,属于近地传播无线信道,作战使用场景包括开阔野外、山地洞穴、城镇街区和建筑物内,常处于非通视条件,容易受到山坡、房屋、车辆、土堆、杂草、灌木等地面障碍物的遮挡[4],这些因素导致机器人链路通信时会产生严重的多径效应和阴影效应,使信号传播产生快速的衰落。这种自然环境随机因素虽然很难进行定量描述,但却是机器人在复杂使用条件下无法回避的。为了合理设计机器人链路通信距离测试方法,有必要对比分析现有RF 传播模型,选取适用于小型地面机器人使用环境的无线电波传播模型。
2.2 RF 传播损耗模型分析
对于被测的机器人链路通信系统而言,其信道的技术参数已由设计方案确定,影响其通信距离的主要是路径损耗。在自由空间中,RF 传播路径损耗可由式(4)得到。

上述公式只是理想环境下的路径损耗计算模型,在实际工程实践中,研究人员针对不同使用环境,通过增加经验修正系数,建立了更多的路径损耗计算模型,如Okumura-Hata 模型、COST231-Hata模型、Walfisch-Ikegami 模型、Egli 模型、Lee 模型、PlaNET 通用模型等[5]。这些模型主要针对现代蜂窝通信特点,适用于收发天线高度在数米到数十米范围之间、信号覆盖范围在1 000 m 以上的无线通信场景,但无法满足贴近地表、高度在数十厘米左右、传播范围在1 000 m 内的收发天线路径损耗估算的精度要求。为此,科研人员对于近地和近距离条件下无线传播路径损耗计算方法进行了深入的研究,建立了更加微观化和精确化的分析模型,如Motley模型、对数距离路径损耗模型等。研究验证表明[5-6],对数距离路径损耗模型可适用于小范围(半径为km级别)内的无线链路室内外近地传播场景,其路径损耗计算公式为:
PL(d)=PL(d0)+10nlg(d/d0)+Xσ(5)其中,d0和PL(d0)分别为参考距离和参考距离处的路径损耗,由实测决定,d 为收发天线之间的距离,n为衰减速率,表示路径损耗随距离增长的速率,取值范围为2~5,Xσ表示标准偏差为σ 的正态随机变量,取值范围为4~10[7]。对数距离路径损耗模型表述简洁,近地传播条件下的适用性好,可作为小型地面机器人无线链路通信距离测试的基础模型。
2.3 路径损耗影响因素分析
常用路径损耗模型均是基于无线电传播特性进行适当简化的经验公式,其适用范围根据测试系统和环境条件而定,估算精度则取决于对环境参数的识别精度。这些模型虽然不能完全适用于地面机器人通信距离测试,但可以根据一些定性的变化规律,确定影响无线链路传播路径损耗的敏感因子,这对于小型地面机器人无线链路通信距离测试方法的设计和试验条件的控制,都具有重要的指导意义。相关研究表明,影响小型地面机器人无线链路路径损耗的主要影响因素如下:
1)收发天线距离。该距离的对数与路径损耗成正比,T-R 距离越大,路径损耗越大;
2)天线离地高度。对于近地无线传播,收发台天线离地高度的对数与路径损耗成反比,天线越高,则路径损耗越小;
3)收发天线之间的遮挡物。收发天线之间的障碍物遮挡,会产生绕射路径损耗,遮挡物越多,损耗越大;
4)传播区域内的地貌。无线链路覆盖区域内地貌越复杂,传播路径损耗越大;
5)收发天线功率。无线链路系统发射天线功率越大,覆盖区域信号越强,有效传播距离越远,而接收天线功率越低,信号接收单元越敏感,链路有效距离越远。其中收发功率取决于链路系统设计、元件筛选质量、电源功率分配、使用寿命等因素。
3 链路通信距离测试方法设计
小型地面机器人链路通信距离测试的目的是通过试验获取机器人在典型使用环境和工作方式下的链路通信极限能力。为了兼顾标准试验条件下的达标性测试,和极限边界条件下的摸底性测试要求,在试验方法设计时,必须将影响机器人无线链路路径损耗的主要因素作为试验控制的关键条件。
根据上述分析,GJB5200-2003《无人机遥控遥测系统通用规范》中的模拟拉距法属于半开放式的测试方法,其试验思想本质上是将无线链路传播环境假设为自由空间,无需高标准的试验场地和条件控制,试验结果直观,便于对环境影响因素进行分析,因此,可作为机器人链路通信距离测试参考方法。在此基础上作如下试验方法设计。
3.1 试验条件
1)封闭测试场地,清理与试验预置环境条件无关的人员、遮挡物、反射物等;
2)通过电波监测设备进行扫频,确保试验场域内不存在与被测链路频点接近的干扰信号。
3.2 试验准备
1)在被测链路通道发射天线输出端连接步进式信号衰减器,机器人系统开机并检测信道是否通畅;
2)根据测试场地条件和链路最大通信距离指标R0确定一个合理的最大测试距离dmax,在此距离内按照等距确定不少于7 个测试点di=idmax/k(i=1,2,3,…,k,k≥7),或按照对数等距取di=2i-kR0(i=1,2,3,…,k,k≥7);
3)根据式(1)分别计算出测试点di处步进式信号衰减器预置值A预i=20 lg(R0/di)。
3.3 试验方法及步骤
1)选定典型试验环境,将机器人移动平台放置在距离机器人控制站di(i=1,2,3,…,k,k≥7)处,并将步进式信号衰减器衰减值设置为A预i。发送遥控指令,使其任务载荷工作,同时接收遥测信息;
2004年末,鹤壁市的城市规划局也颁布了关于建筑外部造型和市面色彩规划的管理通知。同年,南京市也召开了城市色彩建设研讨会,最后把淡绿色定为南京城市的基础色调。
2)操纵控制站向机器人发送遥控指令,使其任务载荷工作,同时接收遥测信息。按1 dB~2 dB 的步幅增大(或减小)衰减值,观察机器人指令收发情况和遥测信息。直至其中一个链路的误码率或丢包率超出指标规定值,记录此时衰减值Aij,转动机器人移动平台方位,重复采样不少于40 次。
3.4 数据处理方法
将测试所得的各位置点处的信号衰减值Aij取算术平均得Aˉi,然后得到一组数据(di,Aˉi),(i=1,2,3,…,k,k≥7),由于在链路最大通信距离实测值Dmax处,链路接收端的信号强度刚好达到天线接收灵敏度,此时信号衰减器衰减值为0,由式(5)可以得到:
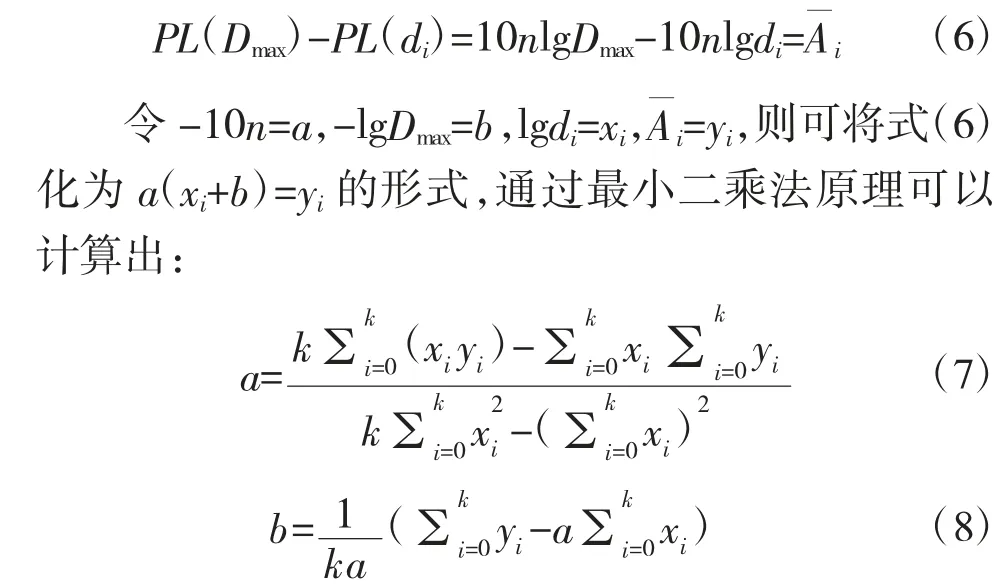
最后代回计算,可以得到路径损耗衰减速率n=-a/10 和链路最大通信距离实测值Dmax=10-b。
3.5 结果评定
在指标评定时,可根据指标规定的环境条件下最大通信距离实测值Dmax与指标值R0的比较判定结果是否达标。
在复杂条件下通信距离摸底时,可根据典型任务剖面构建不同的测试环境,通过测试各种典型环境下的Dmax,分析机器人无线链路通信的极限能力。
4 实测验证与结果分析
某小型地面机器人遥测频率为580 MHz,最大通信距离设计值为1 200 m,为验证上述方法,以该机器人遥测链路为测试对象,按该方法测试其在典型环境下的链路通信能力。
4.1 测试条件设置
根据小型地面机器人的工作环境特点,分别设置开阔道路、街区和室内3 种典型环境测试,同时兼顾其使用方式,确定以下3 种测试条件:
1)开阔道路条件
主要考虑在光学通视条件下,对比不同天线高度和不同地物下的链路信号传播差异性。试验时移动平台在地面行驶,天线基座高度为0.3 m,而操控端电台根据工作方式的不同,分别设置将电台置于地面和直立背负电台两种方式,对应天线基座高度为1.5 m 和0.4 m。地物影响主要考虑在通视条件下,水泥道路两侧为低矮草丛和中等密度树木两种情况的对比,按照100 m 等距选择测试点,如图1所示。

图1 开阔道路条件下测试示意图
2)街区条件
主要考虑普通多层建筑物遮挡的影响,分析建筑物遮挡对路径损耗的影响。限于测试场地条件,选择南北方向连续排列的6 栋砖混砌体结构居民建筑物进行测试,按照等楼间距选取测试点,如图2 所示。
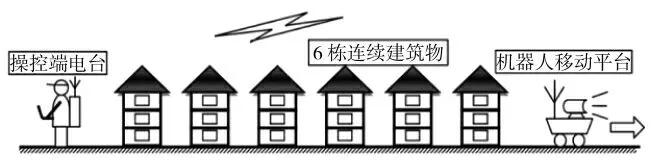
图2 街区条件下测试示意图
3)室内条件
主要考虑多层建筑内楼层遮挡的影响,分析间隔楼层数对路径损耗的影响,选择11 层钢筋混凝土框架结构居民建筑物进行测试,按照等楼层间距选取测试点,如图3 所示。

图3 室内条件下测试示意图
4.2 测试结果分析
将测试数据按3.4 中的方式进行处理,并按式(5)计算出各种典型环境条件下测试点的路径损耗值,将其与距离对数对应,显示如下页图4 所示。

图4 典型环境下的路径损耗图
计算可以得到各种典型环境下的传播模型参数如表1 所示。
通过表1 可以看出,通视条件下该机器人遥测链路最大通信距离基本都能达到指标值,只有在道路两侧有高大树木时对链路传播影响明显,通信距离未达到设计值;同时,电台高度对无线通信距离测试结果影响明显,不同环境下路径损坏衰减因子变化也十分显著。

表1 典型环境下的回归参数归纳表
通过验证试验表明:
1)环境条件对机器人无线链路通信距离测试结果影响显著,本文设计的测试方法能够通过测试数据,计算出不同环境条件下路径损耗衰减速率因子n,可用于分析无线链路通信距离测试时不同环境的复杂性,并定量表征出其差异性;
2)新方法测得不同环境下的衰减速率因子变化显著,且正态随机变量Xσ波动符合模型要求,证明该测试方案和拟合方法合理可行,不仅能够用于规定标准环境条件下机器人无线链路最大通信距离测试,也可用于复杂环境条件下的无线链路通信距离极限能力摸底测试。
5 结论
本文围绕小型地面机器人链路通信距离测试问题,通过对比传统测试方法,结合RF 传播损耗模型特点及路径损耗主要影响因素分析,指出了传统测试方法无法适用于地面机器人链路通信距离测试的原因。根据地面机器人链路通信近地传播的特点,在传统测试方法的基础上,选取对数距离路径损耗模型,设计了适用于地面机器人的链路通信距离测试方法。利用新方法在某型机器人样机上进行了开阔道路、街区和室内3 种典型环境下的实地测试。试验结果表明,该方法合理可行,衰减速率因子的变化,可定量表征出被测机器人在不同环境下链路通信环境的差异性,新方法可适用于复杂环境下机器人链路性能测试评估。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
移动通信(2021年5期)2021-10-25 11:41:48
无线互联科技(2021年4期)2021-04-21 10:12:36
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
电子制作(2018年23期)2018-12-26 01:01:08
电子制作(2016年15期)2017-01-15 13:39:03
新闻传播(2016年11期)2016-07-10 12:04:01
云南电力技术(2015年2期)2015-08-23 01:32:02
电测与仪表(2015年20期)2015-04-09 11:54:10
中国交通信息化(2014年3期)2014-06-05 03:07:09
