复合纤维膜负载碳纳米管的制备及传感性能
2021-08-05 08:33沈悦杨芳芳李楠
丝绸 2021年6期
沈悦 杨芳芳 李楠
摘要: 文章模仿蛛网中包含不同结构的蛛丝,采用离心-静电纺丝法制备聚氨酯-聚对苯二甲酸乙二醇酯(PU-PET)复合纤维膜作为柔性基材,以多壁碳纳米管(MWCNTs)为导电介质,制备出兼具高弹性、高灵敏度的可拉伸复合纤维膜。不同纤维组成的复合纤维膜既能感知人体微小的动作变化,也可响应大幅度的肢体动作。经过一系列的性能测试表明,复合纤维膜断裂伸长率高、响应时间快、稳定性好、回复能力强、压力测试范围广,具有良好的抗氧化性能。这些优异的性能使得該复合纤维膜可以作为可穿戴器件监测人体不同部位的肢体动作,体现出分级响应能力。
关键词: 复合纤维膜;多壁碳纳米管;离心-静电纺丝;应变传感器;人体动作监测;聚酯/聚氨酯纤维
中图分类号: TS102.52
文献标志码: A
Abstract: The article imitates spider webs with different structures and uses centrifugal-electrospinning to prepare polyurethane-polyethylene terephthalate(PU-PET) composite fiber membrane as the flexible substrate, with multi-walled carbon nanotubes(MWCNTs) as the conductive medium, to prepare stretchable composite fiber membrane with high elasticity and high sensitivity. The composite fiber membranes composed of different fibers can not only sense the tiny movement changes of human body, but also respond to large-scale body movements. After a series of performance tests, the composite fiber membranes had high elongation at break, fast response, good stability, strong recovery ability, wide test range of pressure and good oxidation resistance. These excellent performances enable such composite fiber membranes to be used as wearable devices to monitor the movements of different parts of the human body, reflecting graded response ability.
Key words: composite fiber membrane; multi-walled carbon nanotubes; centrifugal-electrospinning; strain sensor; monitoring of body movement; polyester/polyurethane fiber
传统的医疗检测耗时耗力且移动性差,而传感器的研发使得医疗手段越来越先进。现代医疗健康监测着力于便时便利,柔性传感器的研发有望使人们能实时了解自己的健康状况。目前有些常规的检查,人们不用去医院,只要在家里就能检查自己的身体,比如家用血压计、心电仪和血糖仪等[1-3]。但有些疾病的早期预防和日常监测需要通过传感器贴合皮肤及关节等部位,这就需要传感器兼具柔性和高灵敏度。早期研究的可穿戴监测设备大多是将传感器制备成三维结构[4-6],利用空间构造增大传感器的受力范围,但是这种类型的传感器灵敏度和稳定性低,且贴附在人体皮肤表面的舒适度差,因此需要制备出具有高弹性、灵敏度高、稳定性好的可穿戴柔性传感器。
一张蛛网上的蛛丝分为粗丝和细丝,两种丝的直径不同,其中粗丝直径为0.93~1.4 μm,作为骨架丝,拉伸强度高。细丝直径约为0.56 μm,强度稍低,表面附有黏珠。在这两种蛛丝的组合作用下,蛛网的断裂伸长率可达到126%~146%。因此猎物在撞进蛛网时,蜘蛛可以快速感知,并且猎物不易挣脱蛛网[7]。本文模仿蛛网中两种丝的组合结构,制备具有分级响应的复合纤维膜。采用离心-静电纺丝法[8]将聚氨酯(PU)和聚对苯二甲酸乙二醇酯(PET)两种材料进行组合纺丝,制备成复合纤维膜。PU纤维具有优异的高弹性、稳定性及回弹性,在这里承担蛛网中“粗丝”的角色,而PET具有一定的刚性和耐冲击性,在这里充当“细丝”。在受到不同外部应力刺激时,PET纤维感知细微的变化,分辨微小差异;PU纤维则承担更大的应变,保证复合纤维膜的完整性。这两种纤维的组合使得复合纤维膜不仅能够实现从微小形变到大形变的分级响应,还拥有较宽的传感区域及高弹性能。
目前常采用微结构的导电材料负载到柔性基材上[9-11],在外力作用下,当导电网络发生改变而导致传感材料的电阻、电容等发生改变,进而引起电压或电流信号的改变,从而对外界刺激做出对应的响应[12]。本文采用多壁碳纳米管(MWCNTs)作为导电材料负载到复合纤维膜上,对于不同的拉伸应变,根据相对电阻值的变化分析传感器对不同应变的分级响应能力。另外,复合纤维膜除了对单一方向上拉伸形变的检测,还能检测手指关节等不规则表面的动作变化。
1 实 验
1.1 材料与仪器
材料:聚氨酯(华峰氨纶股份有限公司),Nafion溶液(美国杜邦公司),六氟异丙醇(Fluorochem化学有限公司),聚对苯二甲酸乙二醇酯、多壁碳纳米管、异丙醇、乙醇(阿拉丁试剂有限公司)。
仪器:GeminiSEM 500场发射扫描电子显微镜(德国ZEISS公司),万能材料拉伸仪5943(美国Instron公司),数字源表Keithley 2400(美国Tektronix公司),离心-静电纺丝机(实验室自行组装),步进器(中国安卡科技有限公司)。
1.2 聚氨酯-聚对苯二甲酸乙二醇酯复合纤维膜的制备
称取1.8 g PU纤维用洗涤剂清洗干净,去除附着的油渍和污染物,用乙醇浸泡和冲洗5 min。取出后,将其放入烘箱中,在50 ℃下干燥10 min。将干燥的PU纤维放入锥形瓶中,加入24 mL六氟异丙醇,置于磁力搅拌器上磁力搅拌12 h,待PU纤维完全溶解,得到乳白色黏性纺丝溶液,其中PU在溶液中的质量分数为7%。另称取2.5 g PET切片,与PU纤维预处理方法相同,干燥后放入锥形瓶中,加入10 mL六氟异丙醇,置于磁力搅拌器上磁力搅拌12 h,待PET切片完全溶解,得到无色透明黏稠的纺丝溶液,其中PET在溶液中的质量分数为15%。
使用离心-静电纺丝机对两种纺丝溶液进行组合纺丝制备复合纤维膜。接收板上覆盖锡箔纸,以便纤维的收集与后期的剥离。离心-静电纺丝机的纺丝器为四针头纺丝器,前端可安装不同内径的纺丝针头,本实验选用内径为0.16 mm和0.21 mm的针头进行组合纺丝。
由于PU纺丝溶液的黏稠度大于PET纺丝溶液,因此PU纺丝溶液选用内径为0.21 mm的针头,PET纺丝溶液选用内径为0.16 mm的针头。第一组:选用四个0.21 mm的纺丝针头;第二组:选用三个0.21 mm和一个0.16 mm的纺丝针头;第三组:0.21 mm和0.16 mm的纺丝针头各选两个,以正交的方式安装相同内径的纺丝针头;第四组:选用一个0.21 mm和三个0.16 mm的纺丝针头,纺丝时使用相同的参数。
离心-静电纺丝机的具体使用参数为:纺丝电压10 kV,喷丝头和接收板之间的距离10 cm,转速3 500 r/min,相对湿度65%,相对温度25 ℃。
1.3 多壁碳纳米管溶液的制备
称取5 mg MWCNTs粉末于10 mL的样品瓶中,量取2 mL的異丙醇作为溶剂加入样品瓶,再加入80 μL Nafion溶液,Nafion溶液是全氟磺酸型聚合物溶液,可用作黏结剂,添加Nafion有助于MWCNTs在纤维上负载得更加牢固。将样品瓶置于实验室超声波分散器中,超声5 h后取出待用。
1.4 聚氨酯-聚对苯二甲酸乙二醇酯复合纤维膜传感器的制备
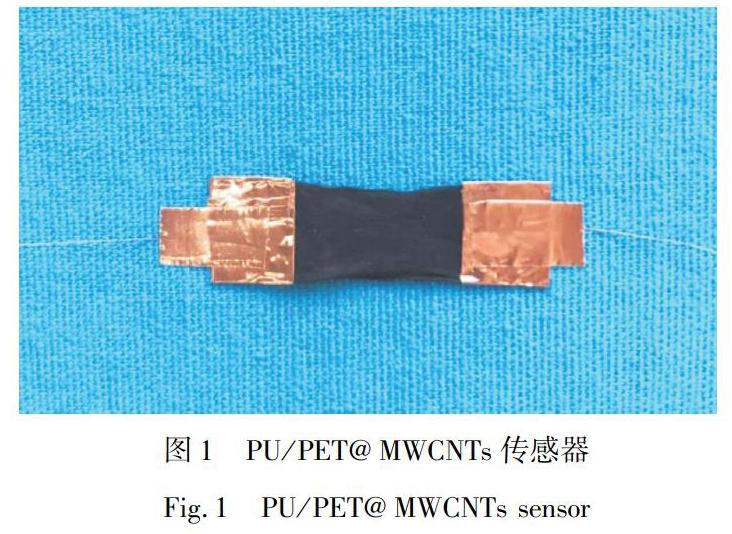
将四组样品从锡箔纸上取下,裁剪成尺寸为2.5 cm×1.5 cm的纤维膜。采用十字拉伸负载法,让纤维之间的间隙增大,使得导电介质不仅仅只附着在纤维膜表层,内部的纤维也可负载上,从而增大了纤维膜的导电性能。将纤维膜按照上下左右四个方向用夹子夹住以25%的拉伸应变进行拉伸,然后固定在实验台上。用1 mL注射器吸取多壁碳纳米管溶液,然后喷附在拉伸状态下的纤维膜上,待自然风干后将纤维膜取下。再喷附一次多壁碳纳米管溶液,置于65 ℃的烘箱进行烘干,2 min后取出,目的是让多壁碳纳米管在纤维表面形成包覆结构,即负载得更加牢固。最后,在负载后的纤维膜两端贴附铜箔及铜丝,组装成传感器以便进行电学响应测试及人体运动监测,如图1所示。
1.5 测试方法
1.5.1 微观形貌
将纤维膜裁剪成合适的大小,采用超景深光学显微镜观察纤维膜的微观结构,另外利用三维测量功能,可以大致观察纤维的整体样貌。
另将负载前后的纤维膜、纤维膜截面及循环拉伸10 000次后的纤维膜裁剪成一定的尺寸,按照顺序贴附在扫描电镜的金属台上。镀金完成后,采用扫描电镜观察样品的整体形貌、单根纤维和MWCNTs的负载情况及拉伸损耗程度。
1.5.2 力学性能
将负载前后的纤维膜裁剪成5.0 cm×2.0 cm大小,采用薄膜厚度测试仪多次测量两组样品的厚度,求取平均值。用夹具将样品固定好,再次测量实际受测的长度和宽度,将实际受测长、宽度及厚度值输入万能材料拉伸仪测试软件中,选定测试条件后开始测试,得到样品的应力-应变曲线。
1.5.3 传感性能
采用Keithley 2400数字源表对传感器进行一系列性能测试,通过数字源表提供稳定电流(1 mA),在仪器配套软件上观察传感器受到各种形变时对应电阻值的变化。利用步进器控制传感器拉伸形变时的速度和步长,以及对步进器写入程序代码进行循环拉伸测试。
2 结果与分析
2.1 表面微观形貌分析
2.1.1 超景深光学显微镜测试
纺丝完成后,将复合纤维膜从锡箔纸上取下来,由于PU纤维弹性大且易收缩,而PET纤维的弹性较小,PU纤维收缩将带动PET纤维,因此失去张力的复合纤维膜呈现皱缩状态,这与图2(a)中内插图及显微镜观察到的情况相符合。如图2(b)所示,当给复合纤维膜施加10%的应变,部分纤维呈拉直状态,其余部分还是为卷曲状,根据两种纤维的弹性不同推断,被拉直的纤维应该是PU纤维。图2(c)中将应变增加至300%,复合纤维膜中的PU纤维几乎被拉直,还有少许呈弯曲状的纤维应该是PET纤维,这说明纤维膜还能继续被拉伸。图2(d)为复合纤维膜的3D显示图,红色代表膜的表面较高,蓝色则说明膜的表面较低。由图2可见,复合纤维膜表面凹凸明显,这种凹凸不平的微结构主要体现在对施加应变的灵敏感知,有利于提高压力敏感性,使得复合纤维膜能够快速感知并响应受到的外部应变。
取多壁碳纳米管溶液,然后喷附在拉伸状态下的纤维膜上,待自然风干后将纤维膜取下。再喷附一次多壁碳纳米管溶液,置于65 ℃的烘箱进行烘干,2 min后取出,目的是让多壁碳纳米管在纤维表面形成包覆结构,即负载得更加牢固。最后,在负载后的纤维膜两端贴附铜箔及铜丝,组装成传感器以便进行电学响应测试及人体运动监测,如图1所示。
2.1.2 扫描电子显微镜(SEM)测试
由于复合纤维膜容易皱缩,超景深显微镜只能反映纤维表层的微观形貌,故使用扫描电镜对复合纤维膜进行更深一步的观察。图3是复合纤维膜负载前后的SEM图,PU/PET复合纤维膜是由离心-静电纺丝制备的,因六氟异丙醇易挥发,在纺丝过程中有利于纤维的形成,并且从图3(a)中可以看出纤维间没有产生明显的黏连现象,且纤维表面比较光滑,没有出现串珠。图3(c)是负载上MWCNTs的复合纤维膜,整体上来看,MWCNTs负载的较为均匀,没有较大的团块,更没有出现部分纤维没有负载上MWCNTs的情况,PU/PET@MWCNTs构成了致密的导电网络。对比图3(b)和(d)放大的SEM图,MWCNTs很好地负载在纤维表面,而纤维是否被MWCNTs包覆,还需将PU/PET@MWCNTs复合纤维膜进行切割,观察截面情况。结果如图3(e)所示,从截面上看,PU/PET纤维表面被MWCNTs包裹住,的确形成了包覆结构,这种结构保证了复合纤维膜的导电稳定性。为了检测MWCNTs附着的稳定性,本实验对负载后纤维膜进行了10 000次循环拉伸,从图3(f)和(g)的SEM图上看,经过10 000次的循环拉伸MWCNTs依然附着在纤维表面,说明MWCNTs在纤维上负载得很牢固,这对传感器的稳定性奠定了良好的基础。
使用离心-静电纺丝法制备的纤维膜,由于转速、电压及纺丝液可能滞留在纺丝头内等因素影响,所以两种纤维组分所占比例不可控制。鉴于PU纤维中含有C、H、O、N元素,而PET纤维只有C、H、O元素,纯PU纤维膜中的N元素含量应该比PU(3)/PET(1)复合纤维膜中的N元素含量多,因此,通过这两组纤维膜中N元素所占整体组分的比重,来验证以上猜想是否正确。通过EDS测试,分别得出两种纤维膜的C、O、N元素的含量(表1—表2)。纯PU纤维膜中N元素占整体元素的4.94%,而PU(3)/PET(1)复合纤维膜中N元素占整体元素的4.46%,且经多次测试,纯PU纤维膜中的N元素含量都比PU(3)/PET(1)复合纤维膜中N元素含量高,说明PU组分的减少导致纤维膜中的N元素含量也跟着减少,PET纤维在复合纤维膜中的確占有一定的组分。
2.2 聚氨酯-聚对苯二甲酸乙二醇酯复合纤维膜传感器性能分析
2.2.1 不同组分的性能测试
为了找出PU纤维和PET纤维之间的最佳组合,对负载前后的四组样品进行性能检测,判断哪一组复合纤维膜最适合作为传感器的柔性基材。从图4(a)四组样品的测试结果可以看出,随着PU组分的减少,纤维膜的最大断裂伸长率呈下降趋势,说明了PU纤维在复合纤维膜的高弹性中起到至关重要的作用。PET纤维的存在是为了让复合纤维膜的灵敏度更高,能够检测微小的形变。但是PET组分含量过多会导致复合纤维膜的弹性降低,不利于对大形变的检测。本实验中PU(3)/PET(1)复合纤维膜满足了柔性传感器需要具备的高弹性,其最大断裂伸长率达到了314%,与纯PU纤维膜相接近。除了弹性,还要检测负载后的复合纤维膜的稳定性及导电性能。本文把四组样品封装成传感器,分别检测四组负载后纤维膜的静置电阻变化和伏-安特性曲线。由图4(b)(c)可见,PU(3)/PET(1)@MWCNTs的静置电阻变化最为稳定,基本保持在800 Ω左右,且它的伏-安特性曲线斜率最大,呈现良好的欧姆特性。结合以上测试,PU(3)/PET(1)@MWCNTs有作为可穿戴传感器件的潜质,但还需通过后续的性能测试进一步验证。
2.2.2 力学性能
图5为PU(3)/PET(1)复合纤维膜及PU(3)/PET(1)@MWCNTs的应力-应变曲线。
由图5(a)中PU(3)/PET(1)复合纤维膜的应力-应变曲线可见,由于有两种不同弹性的纤维组成,在拉伸的过程中纤维的断裂程度不同,导致曲线呈现抖动和阶梯型上升。图5(b)中PU(3)/PET(1)@MWCNTs所受到的最大载荷稍小于复合纤维膜,这是由于加入了Nafion溶液,使得纤维之间的黏结度增加,具有高弹特性优势的PU纤维被PET纤维给削弱了,但是拉伸应变能力没有多大改变,最大应变达到了314%,符合柔性传感器要求的高弹性。
2.2.3 传感性能
图6为PU(3)/PET(1)@MWCNTs传感器的应变-电阻率曲线。
随着拉伸应变的增加,负载在纤维上的MWCNTs也随之改变,相互接触的MWCNTs之间开始分离,原本良好的导电通路逐渐破环,因此PU(3)/PET(1)@MWCNTs传感器的导
电性能变差,导致相对电阻率增大。为了证明其是否具有优异的应变传感性能,需要计算应变-电阻率曲线在拉伸应变区间的灵敏系数(gauge factor,GF),这是传感器应变传感性能的重要指标之一,其计算公式如下:
GF=(R-R0)/R0Δε(1)
式中:R0是复合纤维膜在各拉伸应变区域内的初始电阻值;R是在各拉伸应变区域内所受应变时的电阻值;ε是复合纤维膜的拉伸应变率。
从图6可以看出,灵敏系数随着拉伸应变的增加也逐渐增大。本文将曲线分为四个阶段,在0~50%拉伸应变内,灵敏系数为10.62,说明传感器在较小的形变下具有一定的响应特性。在第二阶段(50%~100%),传感器的灵敏系数为4979,在该阶段灵敏系数上升得较为缓慢,这是因为在拉伸应力的作用下,纤维之间的间隙越来越小,接触得越来越紧密,因此又形成了新的导电通路,使得相对电阻率增加变缓。而到了第三阶段(100%~150%),拉力持续增大,新的导电通路也逐渐被破坏,这时灵敏系数迅速上升至187.45。当拉伸应变上升至200%时,复合纤维膜的导电网络破坏严重,灵敏系数高达865.10,同时说明了复合纤维膜在大应变下具有超高灵敏度。通过计算灵敏系数,该传感器无论在大形变还是小形变的情况下都能获得良好的灵敏度和传感范围,证明其能够有效识别外部施加应变。
为了证明PU(3)/PET(1)@MWCNTs传感器的稳定性与耐久性,本实验将复合纤维膜在5%拉伸应变、5 mm/s拉伸速度下进行10 000次循环拉伸测试,如图7所示。
在拉伸和释放的循环过程中,电阻率随着应变的增大而增大,随着应变的减小而减小,相对电阻一般在最大应变时达到恒定值,去除应变后又恢复到初始值。导电网络在循环拉伸的作用下经历不断破坏和修复的过程,并逐渐趋于稳定的状态。图7内插图是从10 000次循环拉伸中随机截取的一段曲线,可以看出,拉伸产生的各个响应波形相似但略有差异,这是由于PU纤维自身的黏弹性,在拉伸/释放的过程中会有轻微的阻力,侧面说明了复合纤维膜的灵敏度高,可以分辨细微的差异。整体上来看,10 000次的循环测试曲线比较稳定,没有产生明显的滞后现象。这项测试表明,制备的PU(3)/PET(1)@MWCNTs传感器具有良好的循环稳定性和持久性。
图8为PU(3)/PET(1)@MWCNTs传感器的相关性能测试。
图8(a)是传感器在不同拉伸应变下的伏-安特性曲线,电压和电流呈现良好的线性关系,说明传感器在各种应变的情况下都能获得优异的欧姆特性。另外,随着应变的增大,伏-安特性曲线的斜率逐渐减小,表明相对电阻率随着应变的增大而增大,这一结果与应变-电阻率测试相一致。
图8(b)为传感器的阶梯响应测试。将传感器施加从0~55%的应变,大约每停留5 s增加5%的应变。每增加5%的应变,导电网络就发生变化,相对电阻随之改变,因此在应变增加的整个过程中,曲线呈阶梯式增长,阶梯响应曲线连续一致。但每一阶段的拉伸应变,相对电阻会从最高值逐渐降至一个稳定值,这是因为刚形成的导电路径被施加的应力破坏了,但纤维之间的MWCNTs变得更加紧密,又重新建立了新的导电路径,可见传感器的导电通路具有一定的恢复能力。
如图8(c)在5 mm/s循环拉伸释放速率下,传感器在10%、15%、20%拉伸应变下的相对电阻率曲线,每一应变下循环5次。同样,相对电阻值随着拉伸应变的变化发生改变,与阶梯响应测试相同,不同应变下各周期的峰值逐渐减小,直至趋于稳定的峰值。通过研究传感器在不同应变下的循环拉伸测试,说明传感器具有良好的应变传感性能,可以检测和区分各种运动。
为了测试传感器响应能力的快慢,本实验对传感器进行响应时间的检测。对传感器施加了5%的拉伸应变,拉伸速率设置为20 mm/s,记录受到应变时相对电阻达到最高值的时间,停留1 s后,释放应力,记录相对电阻回到初始值的时间。如图8(d)所示,传感器的响应时间为60.97 ms,回复时间为5907 ms,与已报道的相关传感器相比[13-18],该传感器的响应能力更快,灵敏度更高。
2.2.4 环境抗性
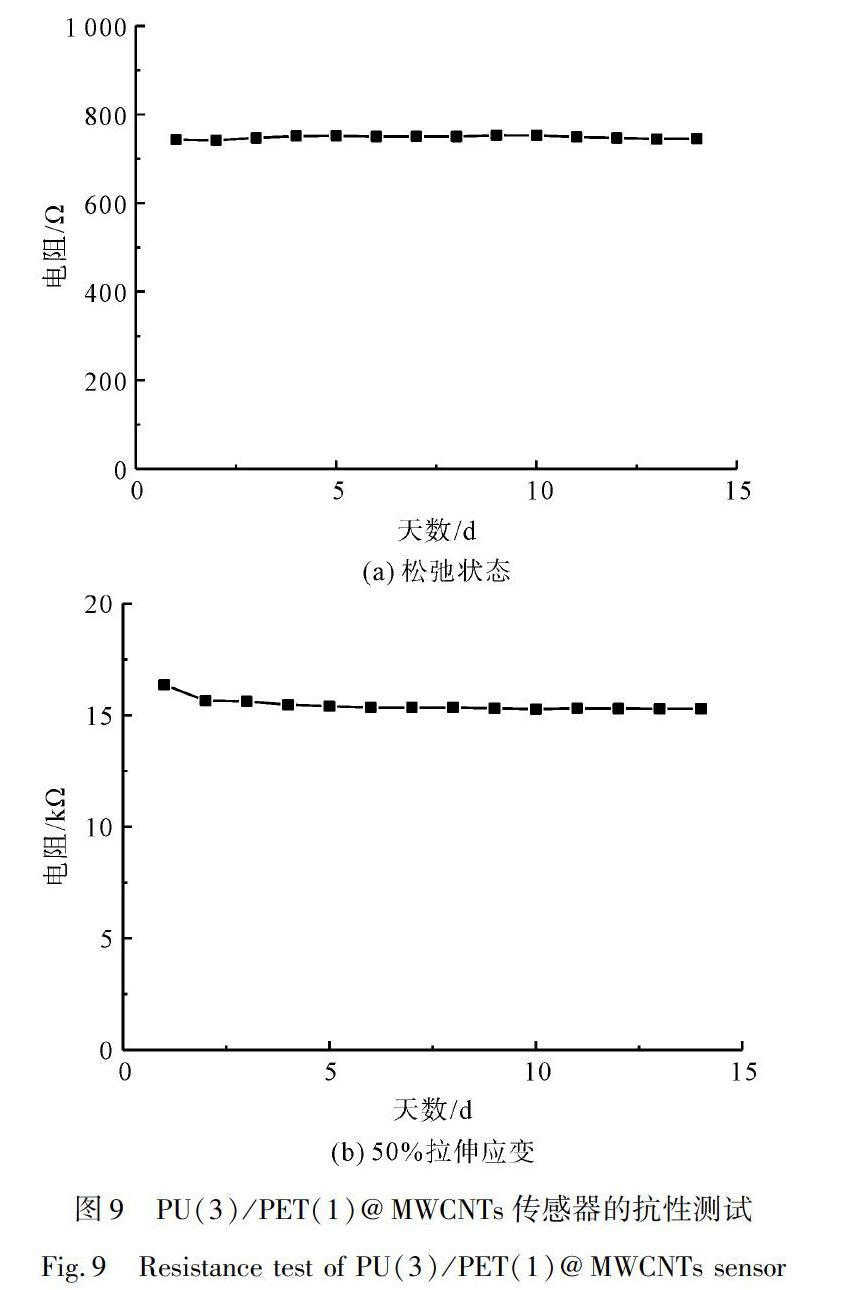
图9为传感器的环境抗性测试。
图9(a)为PU(3)/PET(1)@MWCNTs传感器在松弛状态下,即不施加外部应力的天数-电阻值变化曲线。图9(b)则是传感器被施加了50%拉伸应变的天数-电阻值变化曲线,将两组传感器置于相同的测试环境中(相對温度25 ℃、相对湿度65%),每天检测两组电阻值的变化。其中图9(b)的电阻值较高,是因为施加了50%的应变。经过两周的测试,两组的电阻值基本不发生变化,说明传感器具有良好的抗氧化性,无论是静置在空气中还是长时间处于张力状态下传感器都能保持稳定的状态。
3 人体运动监测
经过一系列的性能测试,说明传感器有能力作为可穿戴柔性传感器件检测人体的动作。本文将传感器贴附在人体手指关节、手腕、手肘等不同部位进行测试,通过数字源表及相关软件记录不同动作产生的信号响应。
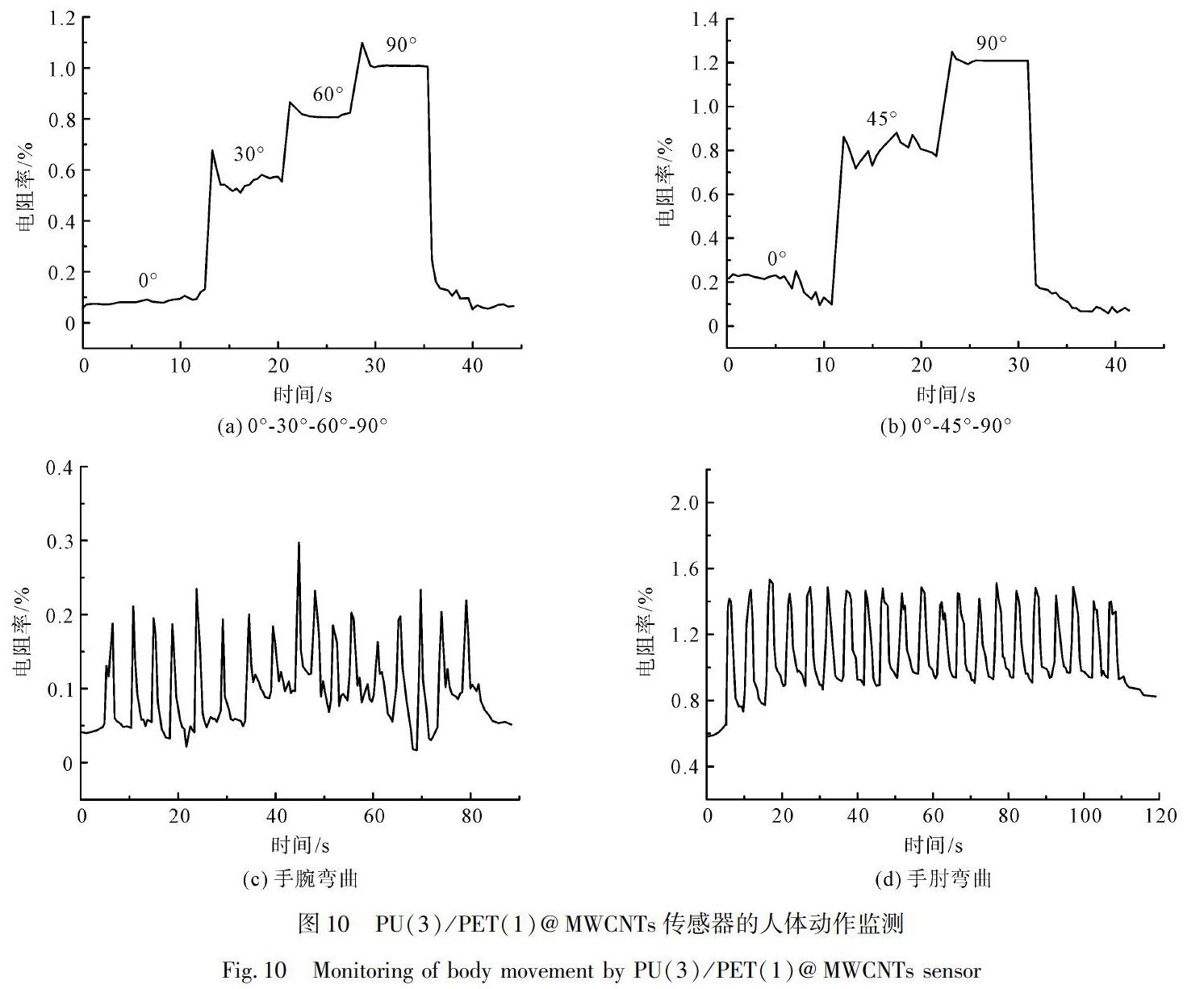
将传感器安装在手指关节处,手指分别以0°—30°—60°—90°与0°—45°—90°两组不同的弯曲过程进行弯曲,如图10(a)(b)所示。随着手指弯曲角度的增大,曲线呈阶梯式增长,关节弯曲使得传感器发生形变,改变了传感器的导电通路,相对电阻同时发生变化,并随着手指弯曲角度的增大而进一步增大。比较两组手指角度变化的梯度响应,发现相对电阻的增值不同,表明该传感器具有较高的灵敏度,可以检测出微小的差异,这对帕金森综合征的预防和监测有很大的帮助。
图10(c)为手腕关节运动响应,随着腕关节屈曲运动状态的变化,实时记录对应的相对阻力变化。当关节弯曲时,相对阻力达到峰值;当关节恢复到初始状态后,传感器的相对电阻又恢复到初始值附近。仔细观察各个波形可以发现,同一节点的弯曲响应曲线有差异,说明该传感器具有良好的灵敏度,可以检测到弯曲过程中的细微差异。同样,通过监测相对电阻的变化,也可以准确跟踪肘关节屈曲变化(图10(d))。与腕关节相比,肘关节产生的形变较大,相对阻力的变化也较大,因此很容易区分腕关节和肘关节的运动。这些结果表明,该传感器能够准确地检测出人体不同部位动作的变化,能够体现出传感器具有分级响应的能力。
4 结 论
本文模仿蛛网因含有不同结构的蛛丝而具有优异弹性及感知细微差异的特点,制备出由PU、PET两种不同性能的纤维组合而成的复合纤维膜,通过相关测试及对手指、手腕、手肘关节屈曲动作的监测,PU(3)/PET(1)@MWCNTs传感器能够实时响应动作的变化,并能分辨细微的差异,实现分级响应。综上所述,制备的PU(3)/PET(1)@MWCNTs复合纤维膜有望在智能穿戴服饰和医疗健康监测领域具有一定的应用前景。
参考文献:
[1]XU S, ZHANG Y H, MATHEWSON K E, et al. Soft microfluidic assemblies of sensors, circuits, and radios for the skin[J]. Science, 2014, 344(6179): 70-74.
[2]JEONG Y, PARK J, LEE J, et al. Ultrathin, biocompatible, and flexible pressure sensor with a wide pressure range and its biomedical application[J]. ACS Sensors, 2020, 5(2): 481-489.
[3]ZHANG Y J, HE P, LUO M, et al. Highly stretchable polymer/silver nanowires composite sensor for human health monitoring[J]. Nano Research, 2020, 13(4): 919-926.
[4]WON Y, KIM A, YANG W, et al. A highly stretchable, helical copper nanowire conductor exhibiting a stretchability of 700%[J]. NPG Asia Materials, 2014, 6: e132.
[5]SUN Y G, CHOI W M, JIANG H Q, et al. Controlled buckling of semiconductor nanoribbons for stretchable electronics[J]. Nature Nanotechnology, 2006, 1(3): 201-207.
[6]劉伟红, 林怡雪, 宋立新, 等. 柔性碳基纳米纤维膜的研究进展[J]. 丝绸, 2020, 57(12): 1-8.
LIU Weihong, LIN Yixue, SONG Lixin, et al. Research progress of flexible carbon based nanofibers films[J]. Journal of Silk, 2020, 57(12): 1-8.
[7]GU Y Q, YU L Z, MOU J G, et al. Mechanical properties and application analysis of spider silk bionic material[J]. Electronic Polymer, 2020, 20(1): 443-457.
[8]王振安, 李楠, 吕汪洋, 等. 聚丙烯腈纳米纤维的高效制备及结晶取向性能[J]. 高分子学报, 2018(6): 755-764.
WANG Zhenan, LI Nan, L Wangyang, et al. Highly-efficient fabrication and crystallinity and orientation of polyacrylonitrile nanofibers[J]. Acta Polymerica Sinica, 2018(6): 755-764.
[9]L L, ZHANG P, XU T, et al. Ultrasensitive pressure sensor based on an ultralight sparkling graphene block[J]. ACS Applied Materials & Interfaces, 2017, 9(27): 22885-22892.
[10]LU Y, BISWAS M C, GUO Z, et al. Recent developments in Bio-Monitoring via advanced polymer nanocomposite-based wearable strain sensors[J]. Biosensors & Bioelectronics, 2019, 123: 167-177.
[11]ZHANG S, LIN H, YANG S, et al. Ultrasensitive and highly compressible piezoresistive sensor based on polyurethane sponge coated with a cracked cellulose nanofibril/silver nanowire layer[J]. ACS Applied Materials & Interfaces, 2019, 11(11): 10922-10932.
[12]CAO Z, WANG R, HE T, et al. Interface-controlled conductive fibers for wearable strain sensors and stretchable conducting wires[J]. ACS Applied Materials & Interfaces, 2018, 10(16): 14087-14096.
[13]KANOUN O, MLLER C, BENCHIROUF A, et al. Flexible carbon nanotube films for high performance strain sensors[J]. Sensors, 2014, 14(6): 10042-10071.
[14]YAMADA T, HAYAMIZU Y, YAMAMOTO Y, et al. A stretchable carbon nanotube strain sensor for human-motion detection[J]. Nature Nanotechnology, 2011, 6(5): 296-301.
[15]WANG Y, WANG L, YANG T T, et al. Wearable and highly sensitive graphene strain Sensors for human motion monitoring[J]. Advanced Functional Materials, 2014, 24(29): 4666-4670.
[16]KIM K H, HONG S K, JANG N S, et al. Wearable resistive pressure sensor based on highly flexible carbon composite conductors with irregular surface morphology[J]. ACS Applied Materials & Interfaces, 2017, 9(20): 17500-17508.
[17]YAN C Y, WANG J X, KANG W B, et al. Highly stretchable piezoresistive graphene-nanocellulose nanopaper for strain sensors[J]. Advanced Materials, 2014, 26(13): 2022-2027.
[18]XIAO X, YUAN L Y, ZHONG J W, et al. High-strain sensors based on ZnO nanowire/polystyrene hybridized flexible films[J]. Advanced Materials, 2011, 23(45): 5440.
猜你喜欢
小天使·一年级语数英综合(2020年5期)2020-12-16
价值工程(2020年27期)2020-10-09
有色金属材料与工程(2016年6期)2017-05-31
学苑创造·B版(2016年3期)2016-06-23
科技创新导报(2016年5期)2016-05-14
纺织导报(2015年10期)2016-01-04
大科技·百科新说(2014年2期)2014-03-03
纺织导报(2014年1期)2014-02-12
物理(2009年10期)2009-12-23
国外科技新书评介(2009年4期)2009-05-31