
滚动摩擦力的测量创新实验
2021-08-05 09:24顾华
数理化解题研究 2021年10期
顾 华
(江苏省苏苑高级中学 221500)
滚动摩擦力生活中处处可见,大到汽车飞机,小到一个小小轴承,处处都有滚动摩擦力的身影.研究滚动摩擦力对于生活的指导意义应该远大于滑动摩擦.但是在人教版必修一中关于滚动摩擦力的认识只有很少的一段文字:滚动摩擦是一个物体在另一个物体表面上滚动时产生的摩擦.当压力相同时,滚动摩擦比滑动摩擦小很多.
什么是滚动摩擦力?滚动摩擦力很小,小到什么程度?在压力相同的条件下,滚动摩擦力要比滑动摩擦力小很多,到底是小多少?比较滚动摩擦力和滑动摩擦力的时候,为什么要在压力相同的情况下?这些疑问,今天在这里我们借助先进的DIS技术把它们一一解决.
一、滚动摩擦力的实验测定
根据滚动摩擦力的定义,一个物体在另外一个物体表面发生滚动时产生的摩擦力,我们确定以下实验方案.如图1所示将两有机玻璃棒放置在长木板的下方,使得长木板下表面受到滚动摩擦.同时使用传统的力的测量工具——弹簧测力计,实际操作下来,发现实验中滚动摩擦力太小,弹簧测力计无法捕捉,如图2所示.
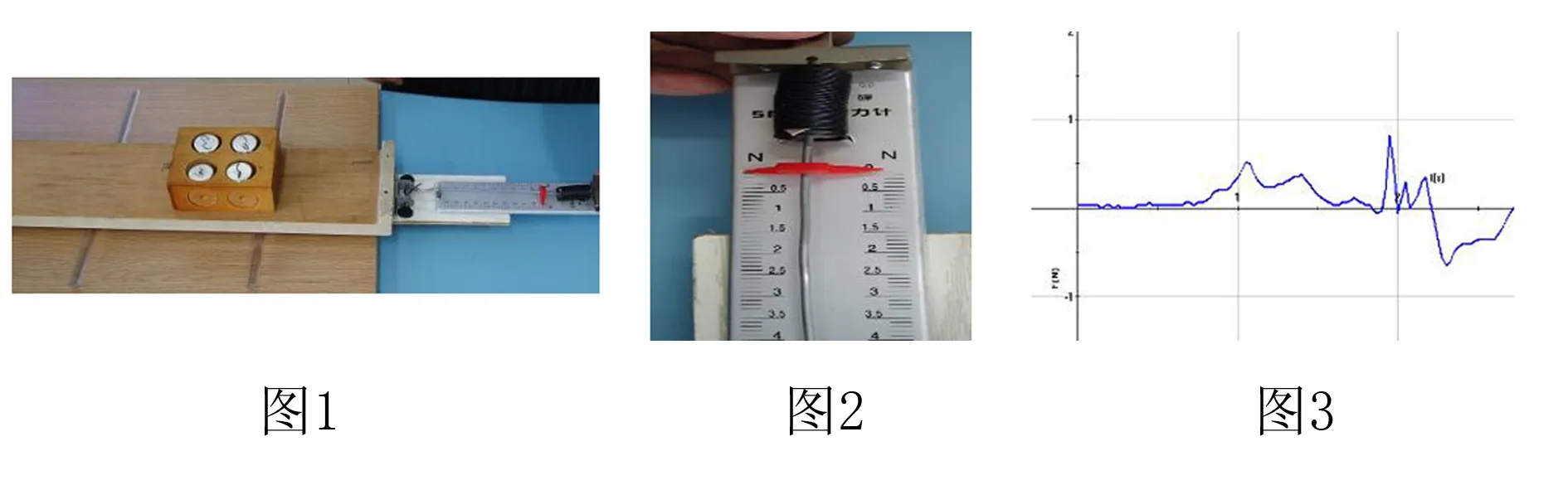
使用先进的DIS数据采集器,发现能捕捉微小的滚动摩擦力,如图3所示,但是因为物体的匀速直线运动是很难模拟的,所以实验的方案需进一步改进;
结合滑动摩擦力实验测量的改进方案,确定以下改进方案.
1.实验原理
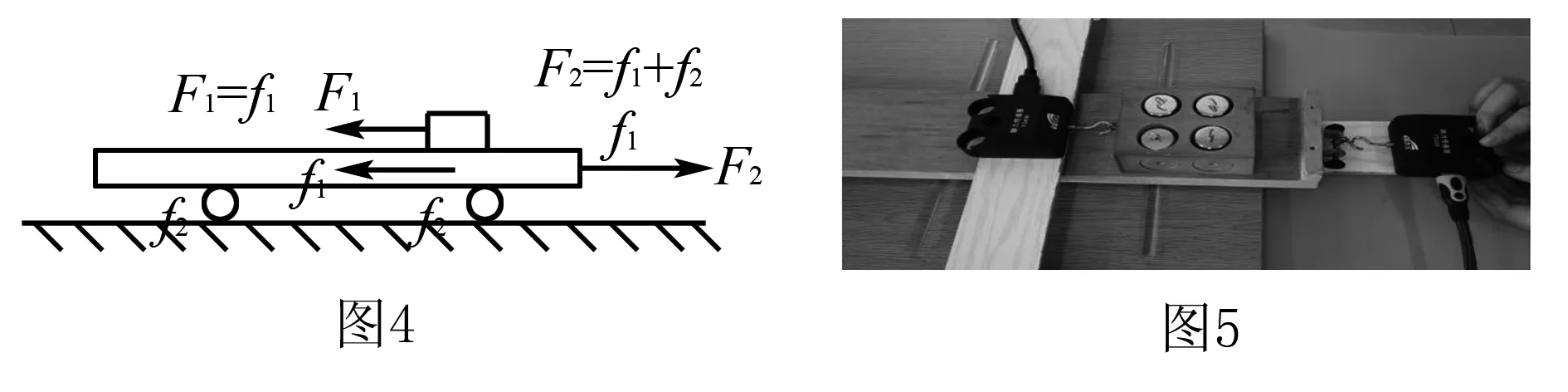
如图4所示,滑块固定,水平缓慢拖动长木板;根据滑块处于静止状态,滑块所受长木板上表面所给的滑动摩擦力即为静力传感器1所显示力的大小(F1=f1);根据牛顿第三定律,长木板上表面所受滑块摩擦力与其等大反向;根据长木板稳定缓慢移动,水平方向受力分析可知,静力传感器2所采集到的是长木板上下两表面所受摩擦力之和(F2=f1+f2),根据矢量合成法则和摩擦力产生条件可知,长木板下表面所受滚动摩擦力的大小即为静力传感器2的数值减去静力传感器1的数值(f2=F2-f1),如图5所示;
2.实验具体操作
(1)固定支架在桌面上,将静力传感器1固定在支架上,另一端连接装有钩码的滑块;
(2)将静力传感器2使用木板水平与连接长木板,使水平拖动长木板时,传感器2中的力始终处于水平方向;
(3)将两滚轴平行放置在长木板下方;
(4)打开DIS数字系统,数据调零后,点击开始按钮;
(5)水平拖动长木板,记录实验数据;
(6)选择合适的数据区域,进行数据直线拟合;两直线纵轴截距之差即为当前长木板下方所受滚动摩擦力大小.
3.数据记录与处理
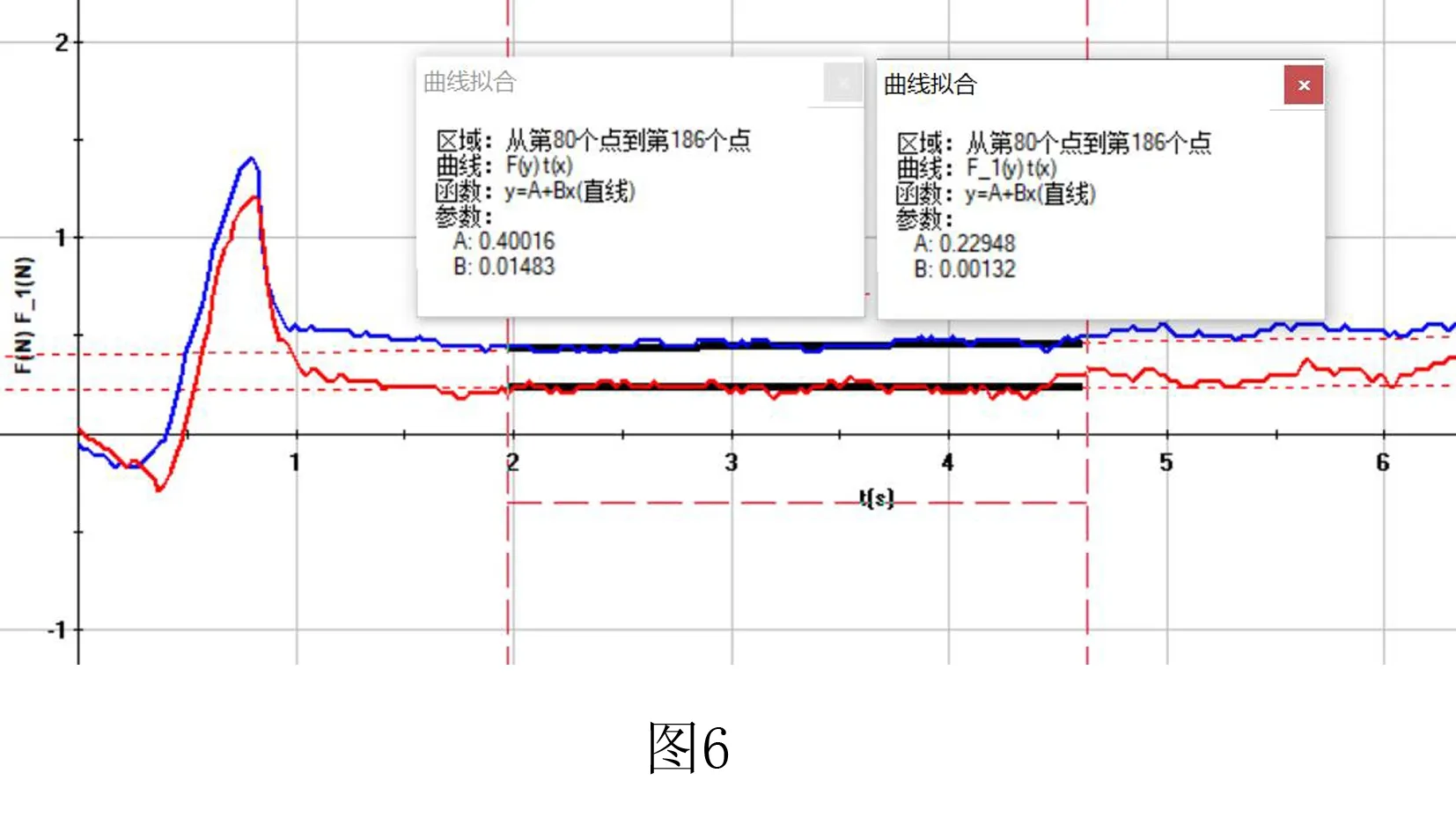
大量的数据显示,当长木板缓慢抽动时,两传感器数据存在一个固定的差值.选择合适区域,进行DIS数据拟合,拟合后发现,两力的传感器采集数据趋向两条直线,如图6所示.两线段的纵轴截距根据实验原理可以捕捉到,两截距之差即为当前滚动摩擦力大小.
f2=0.40016-0.22948=0.17068 N
二、滚动摩擦力、滑动摩擦力比较
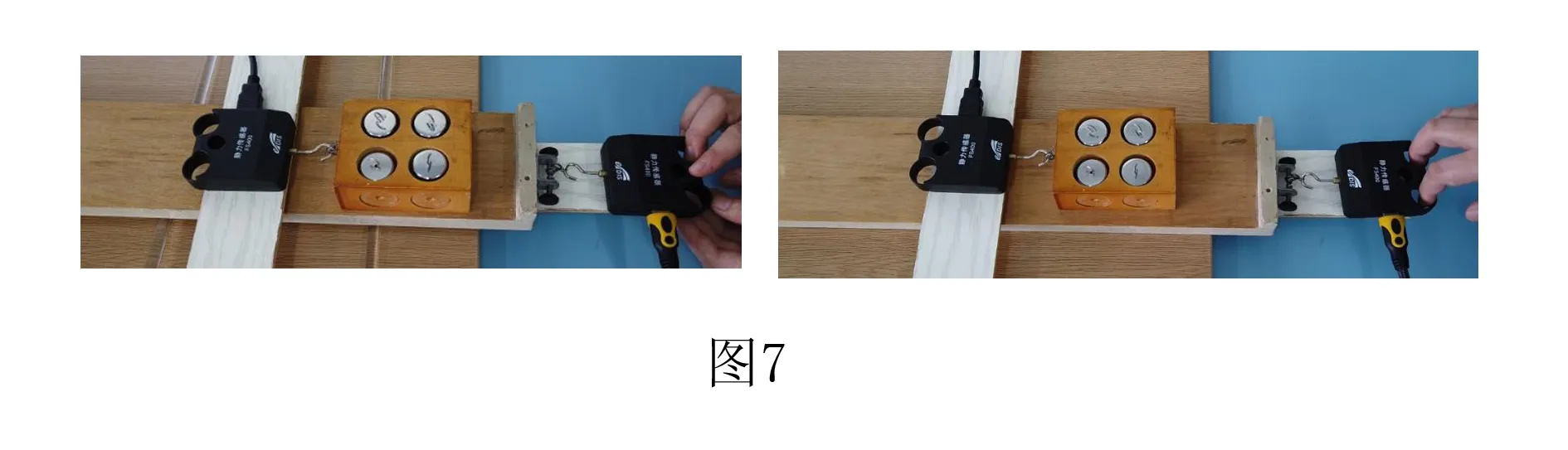
如图7所示,将两平行滚轴取出;打开DIS数字系统,数据调零后,点击开始按钮;水平拖动长木板,记录实验数据;选择合适的数据区域,进行数据直线拟合;两直线纵轴截距之差即为当前长木板下方所受滑动摩擦力大小.数据记录与处理:
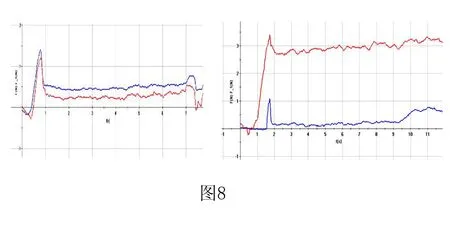
数据定性比较,如图8所示:
拟合数据分析,如图9所示:
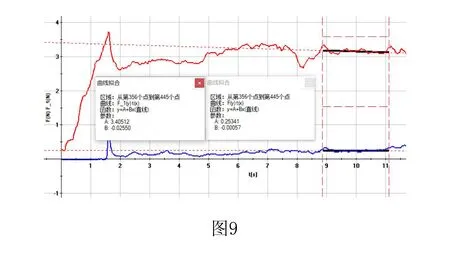
两直线纵轴截距之差即为长木板下方相同条件下所受滑动摩檫力摩擦力;
f2=3.40512-0.25341=3.15171 N
相同压力条件下,滑动摩擦力约为滚动摩擦力的18.5倍.
三、探究滚动摩擦力影响因素
猜测可能影响因素:压力大小、接触面材料、滚轮半径大小(实验条件限制暂不做探究)
实验方法:控制变量法
1.滚动摩擦——压力影响
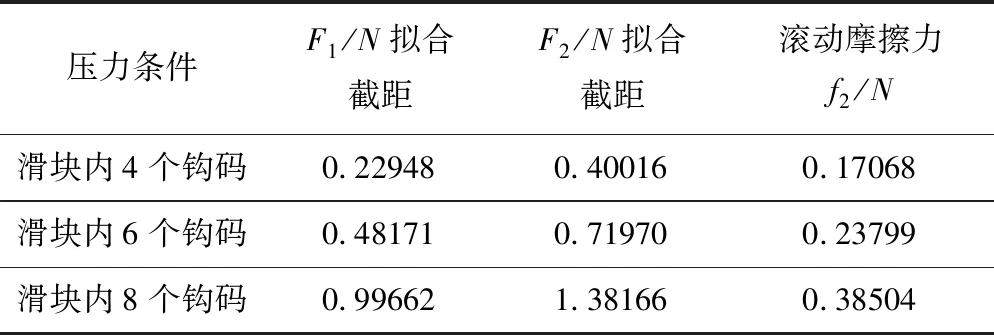
压力条件F1/N拟合截距F2/N拟合截距滚动摩擦力f2/N滑块内4个钩码0.229480.400160.17068滑块内6个钩码0.481710.719700.23799滑块内8个钩码0.996621.381660.38504
小结:在其它条件都不变的情况下,压力越大,滚动摩擦力越大.
2.滚动摩擦——接触面影响
在其它条件都不改变的方法,把有机玻璃棒更换为铁棒,实验数据如图10所示.
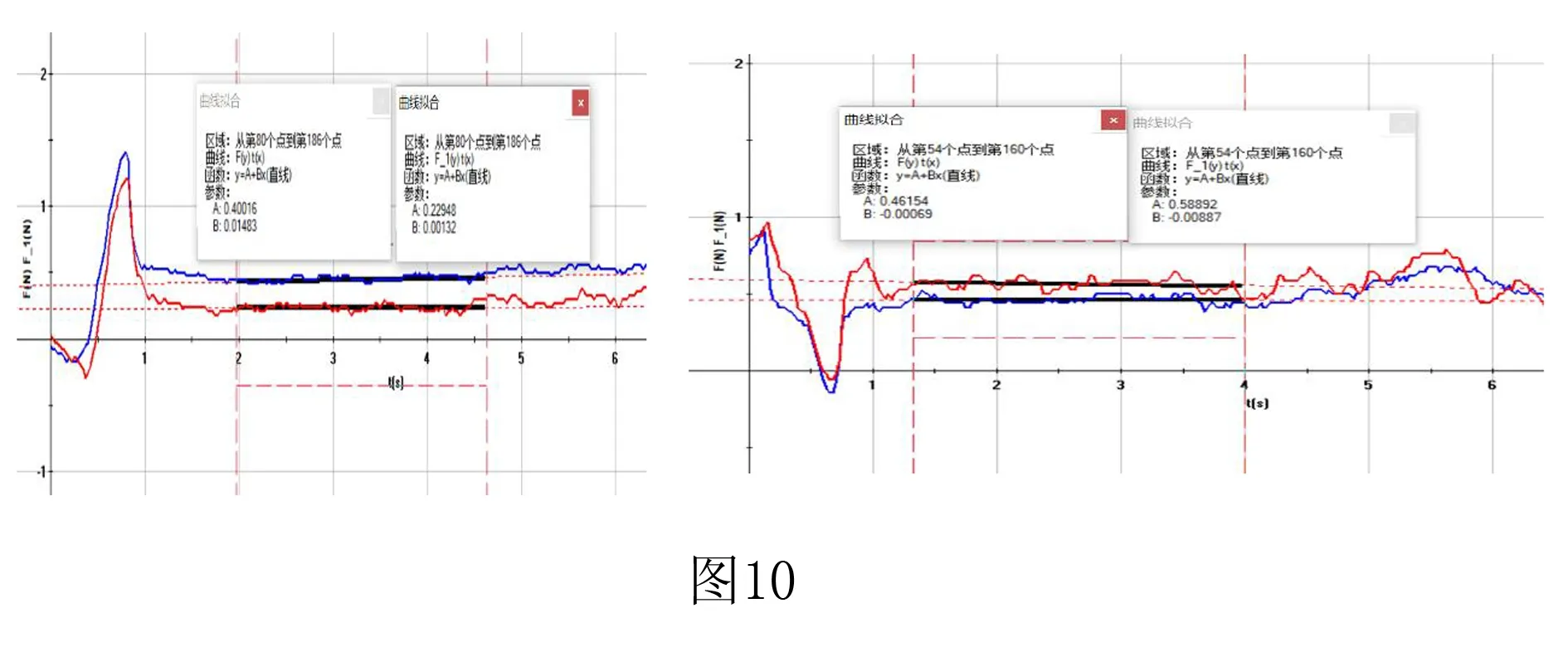
小结:在其它条件都不变的情况下,接触面材料不同,滚动摩擦力也不同.
实验总结:借助先进的DIS技术、大量的实验数据,我们可以很直观的总结出滚动摩擦力一般都很小;在相同压力条件下,滚动摩擦力要比滑动摩檫力小很多等结论.同时控制变量的比较探究实验,让我们的压力、接触面的粗糙程度是影响滚动摩擦力的因素猜想得以直接验证.
四、实验价值与误差分析
1.实验价值
实验价值1:借助先进的数字化教学手段,将抽象的滚动摩擦力直观呈现出来,并对其大小影响因素有初步的定量探究;
实验价值2:对于抽象的两面上的摩擦力模型,有更深的认识;指导学生学会分析摩擦力产生和方向判断,学会从实验现象和数据中总结规律;
实验价值3:在控制其他变量都不变的情况下,让学生进一步对教材中所述“在压力相同时,滚动摩擦比滑动摩擦小的多.”有定量探究.
2.实验误差分析
误差来源1:由于木板自重影响,使得实验数据的宽度受到一定的影响.
误差来源2:两次更换固定物块支架,造成相同条件下,物块所受滑动摩擦力略有变化,但对每一次实验的结果不造成影响;
误差来源3:力的传感器与数据采集器为有线连接,对实验造成一定的局限性,如果能将力的传感器制作为蓝牙连接,数据采集器直接做成USB连接在电脑端,数据效果相信更好.
误差来源4:材料探究中,铁棒的表面锈斑是造成实验数据跳跃变化的主要原因.
猜你喜欢
防爆电机(2022年1期)2022-02-16
昆钢科技(2021年6期)2021-03-09
装备制造技术(2020年4期)2020-12-25
少年漫画(艺术创想)(2019年11期)2019-04-20
作文大王·笑话大王(2017年4期)2017-05-05
科学启蒙(2017年3期)2017-04-10
婚姻与家庭·性情读本(2017年1期)2017-02-16
中国塑料(2015年9期)2015-10-14
体育科学研究(2015年5期)2015-02-28
今日中学生(初一版)(2013年4期)2013-06-07
