
浅析莱斯自动化系统监视数据处理
2021-08-04 21:21刘旭
中国新通信 2021年8期
刘旭
【摘要】 近年来,随着对备份自动化系统的重视程度不断提升,莱斯自动化系统在管制运行中的使用频率逐步提高。本文主要介绍莱斯自动化系统监视数据处理流程,旨在对莱斯自动化系统功能有进一步的认识。
【关键词】 莱斯自动化系统 监视数据处理
莱斯自动化系统是民航华北空管局使用的备份自动化系统。为巩固、强化备份空管自动化系统在管制指挥运行中的处理能力,民航华北空管局发布了《莱斯备份自动化系统常态化使用方案》,旨在备份自动化系统在关键时刻能够用得上、顶得住。本文主要介绍了莱斯自动化系统监视数据处理的原理,希望技术人员能够对系统雷达处理过程有更深刻的理解,不断提高自身业务水平,更好的为管制员提供服务。
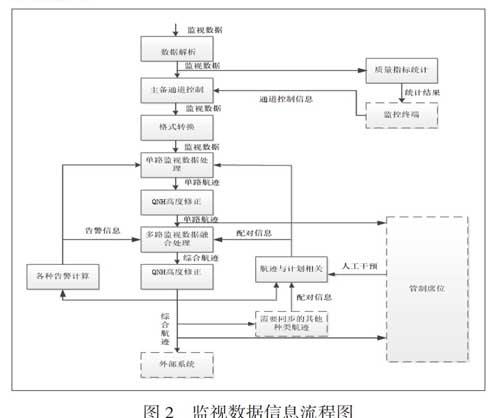
一、监视数据信息流程
如图所示,莱斯自动化系统收到监视数据后,首先在雷达前置处理机上进行监视数据预处理,包括数据解析、主备通道控制和格式转换工作,然后将主通道数据发送至监视数据处理模块进行数据处理,并同时输出监视数据的质量指标统计结果至监控终端。监视数据处理模块在接到监视数据后首先进行单雷达监视数据处理,并生成单路航迹,然后将多个单路航迹融合生成综合航迹。通过系统其它模块对单路及综合航迹数据进行告警计算、QNH高度修正、航迹与计划相关,最后将处理后的单路及综合航迹向各席位及外部系统进行输出。
二、监视数据前置处理
为了尽量保证参与监视数据处理的数据质量,减轻后端处理的负担,系统接入包括雷达数据、ADS-B数据等各种监视数据时都会先经过前置处理模块进行预处理,筛选整理后再进入监视数据处理模块进行航迹的生成和维护等工作。
2.1监视数据前置处理机的配置
监视数据前置处理模块部署在监视数据前置处理机上,监视数据前置处理机之间通过独立的雷达子网互联,其它服务器只能通过C网登录监视数据前置机。系统有多种监视数据前置处理机:在主监视数据处理模块之前配置了4台RFP服务器和2台SFP服务器,RFP引接普通航管雷达数据,SFP引接ADS-B和MLAT数据;在旁路监视数据处理模块之前配置了4台BRFP服务器和2台BSFP服务器,BRFP引接普通航管雷达数据,BSFP引接ADS-B和MLAT数据;在塔台本地监视数据处理模块之前配置了2台TSFP服务器,可引接普通航管雷达数据、ADS-B和MLAT数据。
2.2监视数据格式分解和合法性检查
监视数据前置处理模块对接入的监视数据按照对应的格式规范进行数据项分解,提取其中目标属性、位置、高度、速度、24位地址码、时标等信息,同时对接收到的数据项做必要的合法性检查,数据帧中声明的本监视源的区域码和地址码不符合定义则被系统丢弃(此项检查可通过离线参数SAC_SIC_CHECK来控制是否执行),长度错误(数据帧实际长度与声明的不符或过长)的数据帧、组装格式错误(不符合已定义的数据格式)的数据帧等明显有问题的数据将被过滤掉,以此保证异常的监视数据不会对后续的单路航迹处理和多路航迹融合造成不良影响。
监视数据前置处理模块在对原始监视数据的数据项进行分解提取之后,将其中的有用信息重新组装成精简格式的数据帧发送给对应的监视数据处理模块进行处理,如此做法可大为减少数据流量,减轻后端的处理压力。
2.3监视数据的主/备通道处理
系统支持对每个监视数据源同时接入A/B两个通道的数据,监视数据前置处理模块同时在接收所有通道上的数据,在通道控制模块的自动控制或人工控制下,将其中质量比较好的通道作为主通道,当前主通道上的信息才会被发送给SDP进行进一步处理,当前备用通道上的信息则不向后端发送,这也是出于减轻SDP负担的考虑。
监视数据主/备通道人工或自动切换由系统监控席决定,自动切换的条件根据监控席的逻辑判断得出,切换的决定由监视数据前置处理模块负责执行。
三、监视数据处理
监视数据处理模块接收前置处理模块发送过来的处理过后的监视数据,完成航迹目标信息的生成和更新工作。
航迹信息从性质上可分为两大类:单路航迹和综合航迹。
单路航迹:是指雷达数据、ADS-B数据、MLAT数据等单独的监视数据源,由系统进行处理后生成的前后具有关联性的航迹。用户可以选择每路单路航迹是否参与系统的综合航迹融合,不参与融合的单路航迹对综合航迹不会造成影响。
综合航迹:是指系统将参与融合的所有单路航迹的各种数据进行融合,生成的能够表示目标最佳状态的唯一目标信息。
3.1单路监视数据处理
监视数据处理模块提取出目标的位置、高度、速度、属性、识别符、时标等数据项,进行数据项的合法性检查,将通过检查的目标进行坐标系转换并投影到系统平面上,参与单路航迹跟踪处理。如果系统判定最新收到的航迹与上个周期的某个目标为同一航空器则对该航迹信息进行更新,如果系统判断最新的航迹为新的航空器则新建一个航迹。
目标相关需要对目标位置、高度、24位地址码、航班号、二次代码等数据项进行评估。首先对各个数据项分别进行评估,依据两个目标在同一数据项的相似程度评估是否为一个目标的可能性,然后根据各个数据项的重要性权重(系统可以配置24位地址码、航班号、二次代码的影响权重)综合考虑是否更新上個周期的某个航迹或者建立一个新的单路航迹。
3.2多路监视数据融合处理
对于系统综合航迹,除了可以分别控制雷达航迹、ADS-B合成航迹和MLAT合成航迹是否参与融合,还可以离线定义已经确定参与融合的几种航迹的融合可信度。在参与融合的几种航迹信息都能覆盖到某个目标的情况下,融合可信度设置为“低”的航迹不会对系统综合航迹造成任何影响;可信度设置为“高”的航迹正常参与融合。在只有某种航迹能发现目标的情况下,只要这种航迹被允许参与融合,则系统正常通过融合处理生成系统综合航迹,不再考虑融合可信度。综合航迹目标的位置由参与融合的各路单路航迹目标位置经过卡尔曼滤波处理后得到。综合航迹目标的速度由综合航迹的目标位置进行迭代计算,经过卡尔曼滤波处理后得到。综合航迹目标的高度选取了参与融合的某个单路雷达航迹的高度,并在每次系统综合航迹更新时进行检查,视情况继续沿用同一部雷达所报告的高度或是重新选择其他雷达的报告高度。检查过程具有几个特点:一是尽量不更换雷达以避免高度数值回跳;二是比选时少数服从多数。因为滤波平滑方法是利用历史值来修正当前值,使其不出现明显的跳变,适合用来处理航空器水平位置上的变化(因航空器在高速移动时的惯性因素不可避免);与之情况不同的是垂直方向的变化,高度可能在某一数值上停留很久后突然改变,引入滤波平滑后将不可避免带来反应慢、报告给管制员的数值跟不上实际变化的问题。
3.2.1综合航迹的目标相关
综合航迹的目标相关与单路航迹判定方法相似,系统判定多路监视源报告的多个已确认的目标信息是否和某个已存在的综合航迹为同一目标。如果相关通过,则认为这些目标信息确指一个目标,接着进行卡尔曼滤波等后续处理,否则建立新的综合航迹。与单路航迹的情况不同,只有场面范围内的新建综合航迹会立刻显示在界面上,其他区域内的新建综合航迹至少要经过3个更新周期的确认才会进行显示。
3.2.2综合航迹的更新频率
一般情况下,系统的综合航迹更新周期为4秒。在PRM窗口中如果系统综合航迹有ADS-B或MLAT数据参与融合时,且位于离线定义的航迹快速更新空域内,则航迹的更新周期为1秒。
3.3 QNH高度修正
系统能根据接收到的QNH信息,对单路航迹目标和综合航迹目标的标准大气压高度进行QNH高度修正处理,使得目标在QNH空域内显示修正海压高度。
QNH修正高度的数值由以下公式得出:
QNH修正高度 = 标准气压高度 +(QNH - 1013.2)× 修正系数
其中修正系数在不同QNH值的情况下取值不同。
在水平方向上,用QNH空域的侧向界限作为水平边界,在区域内的目标才可能进行QNH高度修正,在区域外的目标保持标准大气压高度。
在垂直方向上,QNH空域的上界为过渡高度(TA)和过渡高度层(TL)组成的过渡夹层,目标上升穿越TA时,将从QNH修正高度轉为标准大气压高度;目标下降穿越TL时,将从标准大气压高度转为QNH修正高度。
TA和TL之间的高度差叫高度偏移量(RH),有关系式:TA + RH = TL
因此在数据库中指定TA或TL其中之一的值,并且设置为计算基准,另外一个的值由系统根据上述公式自动得出。
这里RH的取值和QNH的大小有关,在数据库中可设置QNH的两个边界值limit1和limit2,同时也需要设置三种对应的RH的可能取值RH0、RH1和RH2,他们之间的关系为:
1)QNH ≤ limit1时,RH的取值为RH0;
2)limit1 < QNH < limit2时,RH的取值为RH1;
QNH ≥ limit2时,RH的取值为RH2。
3.4航迹过载处理
系统能根据设定的处理能力对监视数据进行超载处理,当所跟踪处理的目标的数量达到系统规定的值时,系统能在监控界面上发出超载告警提示,并对溢出数据进行取舍处理:如果新目标在管制区外,则无条件丢弃;如果新目标在管制区内,则挑选一个既在管制区外又没有和飞行计划相关上的已有目标进行丢弃;如果没有满足条件的已有目标,则新目标被丢弃。
四、结束语
莱斯自动化系统的不断改进,目前已与主用系统在操作界面和功能性上基本一致。随着主备同步等一系列技术的应用,未来将实现主备自动化的无缝切换。希望各位技术人员能够深入学习不同系统间的差异,逐步提高备份自动化的运行稳定性,为管制员提供更好的技术服务。
参考文献
[1]民用航空空中交通管制自动化系统 第2部分:技术要求
[2]莱斯自动化系统技术设计说明
参 考 文 献
[1]民用航空空中交通管制自动化系统 第2部分:技术要求
[2]莱斯自动化系统技术设计说明
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
时代英语·高二(2021年4期)2021-07-29
时代英语·高二(2021年4期)2021-07-29
电子乐园·中旬刊(2021年7期)2021-07-13
科技创新导报(2021年33期)2021-04-17
科学大众·小诺贝尔(2019年6期)2019-08-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子技术与软件工程(2016年24期)2017-02-23
中学生数理化·高一版(2016年6期)2016-05-14
