一种可穿戴下肢外骨骼机器人的结构设计与仿真
2021-08-04 09:21白云峰吴汉忠刘建辉董威威朱世根
毛纺科技 2021年7期
白云峰,吴汉忠,刘建辉,董威威,丁 浩,朱世根
(1.东华大学 机械工程学院,上海 201620;2.东华大学 纺织装备教育部工程研究中心,上海 201620)
外骨骼机器人基于仿生学原理,通过模拟人体骨骼而设计,可穿戴在人体身上,从而将人的智慧与机器人的力量结合起来,助力人体完成原本不可能完成的任务[1]。国外很早就已经开展关于外骨骼机器人的研究,目前比较成功的是洛克希德·马丁公司研制出的 HULC 型外骨骼机器人[2]以及日本筑波大学研制的HAL助力外骨骼机器人[3]等。国内目前对下肢外骨骼机器人的研制主要集中在医疗康复领域,而针对军事领域或者其他领域的外骨骼机器人研究相对较少[4-6],主要原因就包括外骨骼机器人灵活性不足等。为解决外骨骼机器人机构灵活性方面问题,使外骨骼机器人在满足助力功能并提高人体负重能力的前提下能灵活应对复杂环境,本文在电液伺服控制技术研究的基础上,采用仿生学原理开发出一种液压直接控制的下肢外骨骼机器人,模拟分析结果显示,该下肢外骨骼机器人能够灵活跟随人体下肢进行运动,具有良好的可穿戴性,结构轻巧,坚固耐用,安全性能良好。
1 仿生学设计
1.1 人体下肢运动分析及外骨骼自由度分配
仿生学中常用人体运动解剖学描述解释骨头之间的运动,以及每个关节在人体3个平面上的运动范围,3个平面统称为解剖学平面[7](见图1)。解剖学平面将人体划分为前后2部分的额或冠状面,上下2部分的横向平面,以及左右2部分的矢状面或横向面。在矢状面的运动称为弯曲—伸展,在冠状面的运动称为外展—内收[8-9]。关于踝关节,伸展通常称为背屈,弯曲通常称为砣屈。下肢是人体中从臀肌一直延伸到脚并同躯干下部连接的部分,主要包括骨盆、大腿骨、胫以及脚。髋关节将骨盆和大腿连接,膝关节将大腿和小腿连接,踝关节将小腿和脚连接。

图1 人体解剖学平面
人体下肢主要有髋关节、膝关节和踝关节3种关节,其中髋关节是一种多轴式球窝状骨液关节,膝关节是一种骨液铰链关节,踝关节是一种铰链式滑膜关节。
人体下肢具有推动人走路和承受重量2个功能,结构复杂,运动形式多变。设计下肢外骨骼机器人时,在满足功能要求的前提下,应尽可能地减少自由度的数量,一方面可以简化下肢外骨骼机构,另一方面也可以降低控制的难度并节约能源。采用仿生学原理,根据人体下肢运动的简化分析图(图2),下肢外骨骼机器人设计了14个自由度,分配到每一侧有7个自由度。其中,髋关节3个自由度(弯曲—伸展、外展—内收、环形),膝关节1个自由度(弯曲—伸展),踝关节3个自由度(背屈—砣屈、反向—外翻、环形)。人体下肢运动时,膝关节承载力较大,其对下肢运动范围影响最大,考虑到轻量化、易控制、节约能源等因素,将膝关节自由度设计为主动自由度,其他自由度均为被动自由度。
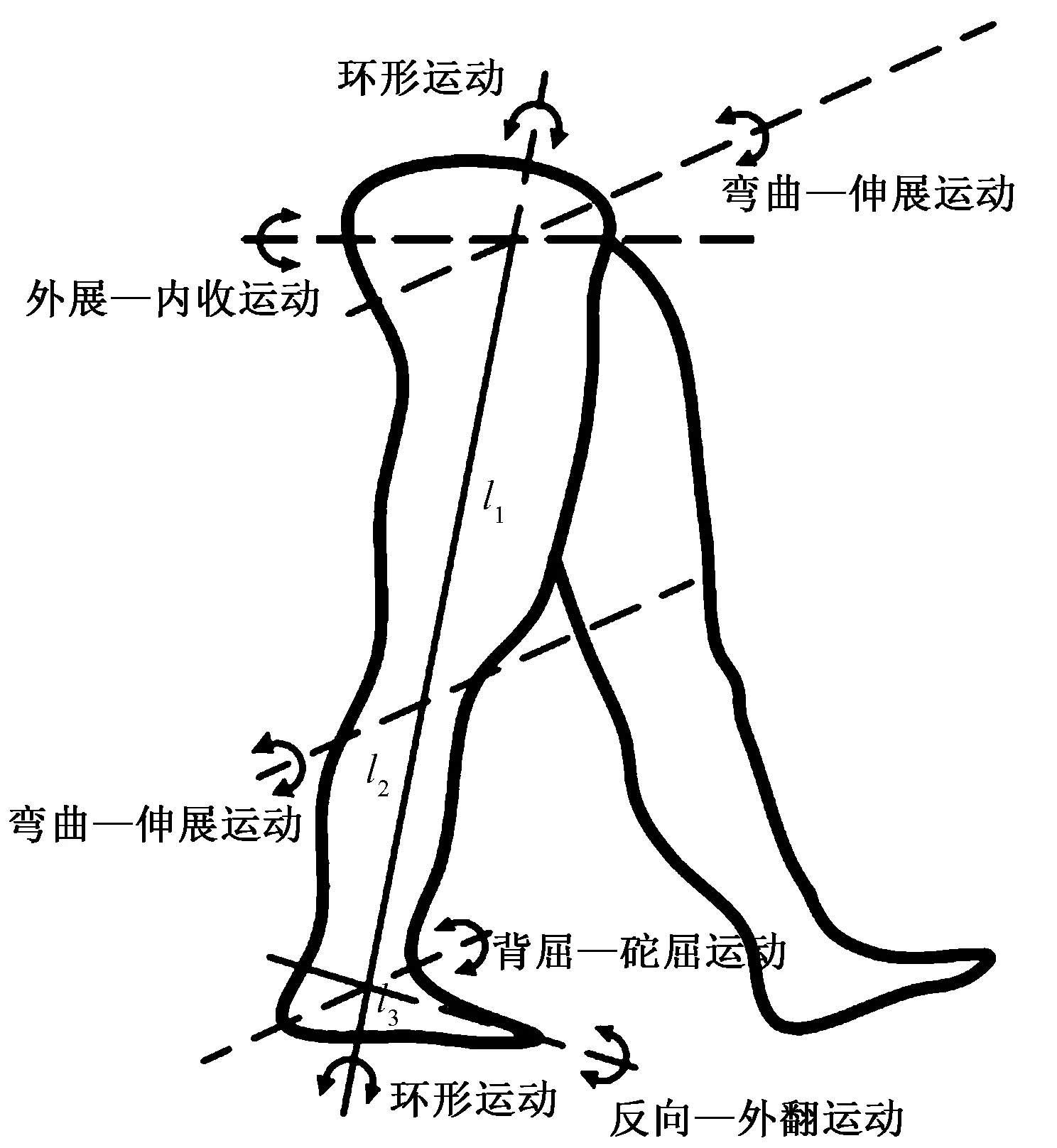
图2 人体运动简化图
1.2 外骨骼整体结构设计
该下肢外骨骼主要由2条机械腿组成,2条机械腿由腰部板固定装置连接在一起,下肢外骨骼机器人模型如图3所示。腰部板设计有尺寸调节装置,以满足不同人群的穿戴需求。在腰部板固定装置上设计了一种箱体结构,用以装载液压系统部件。在大腿杆及小腿杆中部设置有尺寸调节装置,以满足不同人群身高需求。在外骨骼大小腿杆中间部位设置有绑带,通过绑带与人体固定在一起,达到穿戴效果。下肢外骨骼机器人的驱动装置液压部件(液压缸)采用α+β钛合金[10],非受力件如箱体采用复合材料制作[11],其余部件均采用7085超高强铝合金[12],极大地减小了下肢外骨骼机器人的重量。
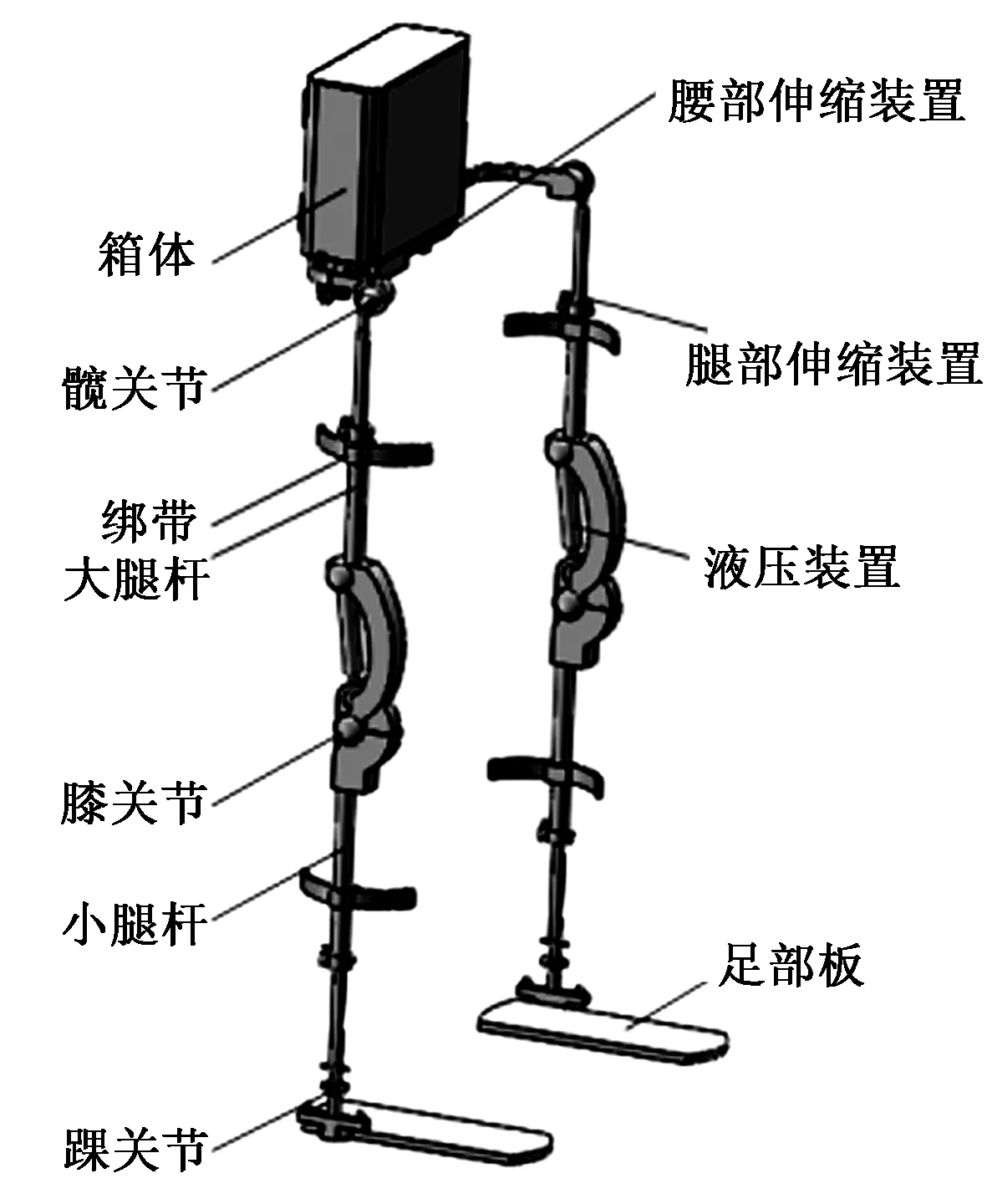
图3 下肢外骨骼机器人模型
在模拟仿真的基础上,加工制作了外骨骼膝关节样机,并进行了下肢外骨骼机器人膝关节与人体穿戴实验,人体穿戴外骨骼样机实况图如图4所示,结果表明人体能较好的穿戴外骨骼样机,其穿戴性能良好。

图4 人体穿戴外骨骼样机实况图
2 下肢外骨骼机器人结构设计与分析
2.1 膝关节
膝关节的承载力较大,且其对人体下肢运动范围的影响较大,故将膝关节设置为主动关节。膝关节主要采用滑块曲柄机构。与常见的连杆机构不同,本文所设计大腿件与小腿件通过轴连接,液压缸与大腿件通过轴连接,液压杆与小腿件通过轴连接,通过液压杆伸缩实现大小腿件之间的夹角变化,进而实现关节的旋转运动,极大地扩展了膝关节的运动范围,提高了机构的灵活性。设置限位螺钉以及安全板有效实现了对运动范围的限制,同时可以对穿戴者的膝关节起到保护作用,提高下肢外骨骼机器人的安全性能。膝关节结构见图5。
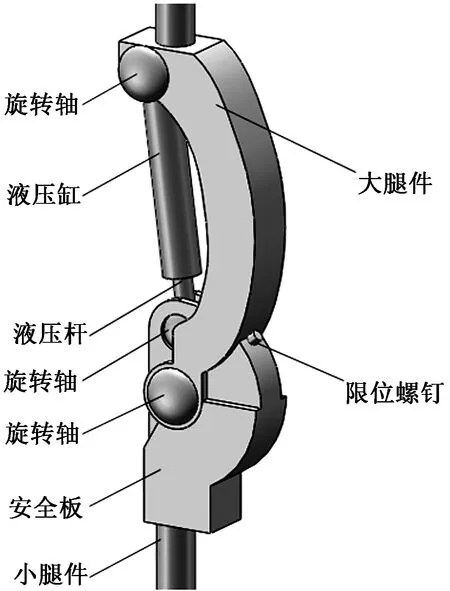
图5 膝关节结构
2.2 髋关节及踝关节
髋关节和踝关节的行为方式类似于球关节,存在3个自由度,这几个自由度对于人体平稳运动的实现至关重要。从生理学角度看,髋关节和踝关节的运动形式复杂多变,将髋关节和踝关节设计为球面副结构,其结构如图6、7所示。球面副结构可以很好地满足髋部和踝部在各个方向上的运动,大大提高了下肢外骨骼机器人的灵活性及跟随性。踝关节运动范围相对较小,因此前后各装有一个弹簧及弹性绳索,在运动过程中,当有外力存在时,一方面可以通过他们的弹力提供踝关节所需的部分恢复力,另一方面也可以限制关节的转动范围,对人体踝关节起到一定保护作用,提高机构的安全性能。

图6 髋关节结构

图7 踝关节结构
2.3 整体结构运动范围分析
将外骨骼机器人单侧下肢模型进行简化,如图8所示,该外骨骼机器人采用液压驱动。设计的驱动装置是单活塞杆液压缸,其行程为100 mm,最大长度250 mm。
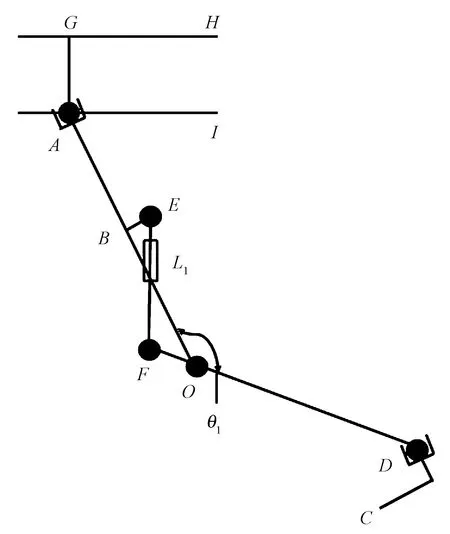
A—髋关节;O—膝关节;D—踝关节;AI—腰部板;AO—大腿件;DO—小腿件;CD—足部;EF—液压装置;θ1—膝关节运动角度。
髋关节与踝关节在空间上采用的是球面副结构,在不考虑设置的限位装置情况下,其运动范围不受限。膝关节采用的是滑块曲柄机构,OF长度小于50 mm,OE长度小于200 mm,在不考虑设置的限位装置情况下,其运动范围亦不受限。
考虑到实际设计应用中设置的限位装置的存在,外骨骼机器人下肢3个关节的运动范围具体如表1所示[13],这与人体实际的关节运动范围是高度一致的。
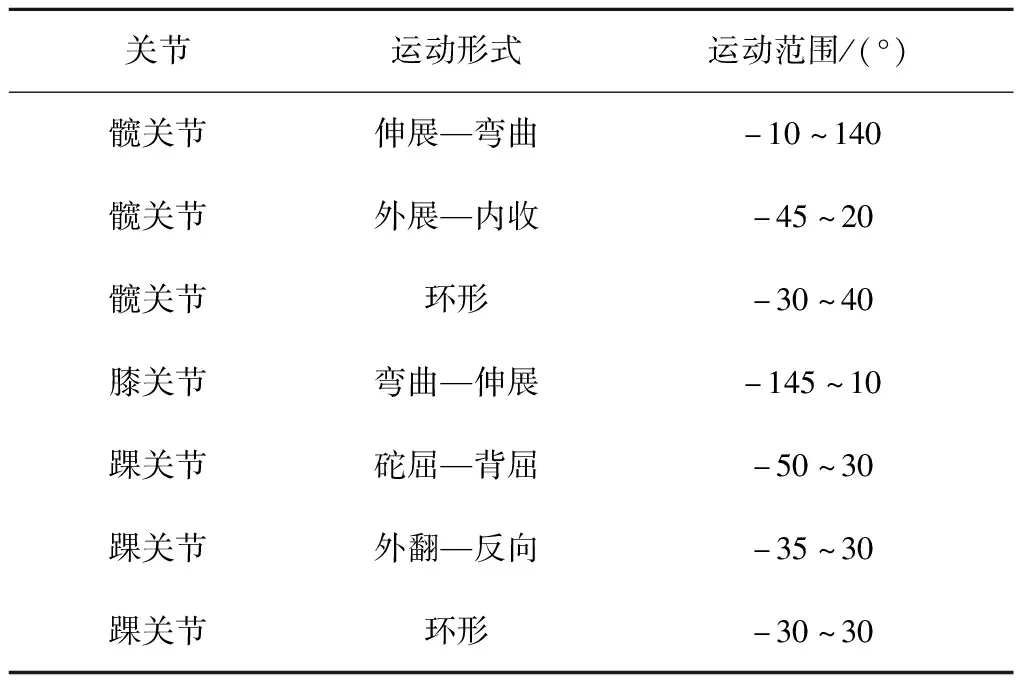
表1 外骨骼机器人下肢关节运动范围
3 下肢外骨骼机器人运动学理论分析
3.1 D-H坐标系的建立及参数定义
在下肢外骨骼单侧模型中,有7个自由度被考虑,其中3个位于髋关节、1个位于膝关节、3个位于踝关节。首先根据D-H法则定义坐标系[14],坐标原点位于腰部板中间,即原点X0Y0Z0。局部坐标系如下,髋关节:环形运动X1Y1Z1,外展—内收X2Y2Z2,弯曲—伸展X3Y3Z3;膝关节:弯曲—伸展X4Y4Z4;踝关节:反向—外翻运动X5Y5Z5,背屈—砣屈X6Y6Z6,环形运动X7Y7Z7。末端执行器位于足部底板最尖端X8Y8Z8。
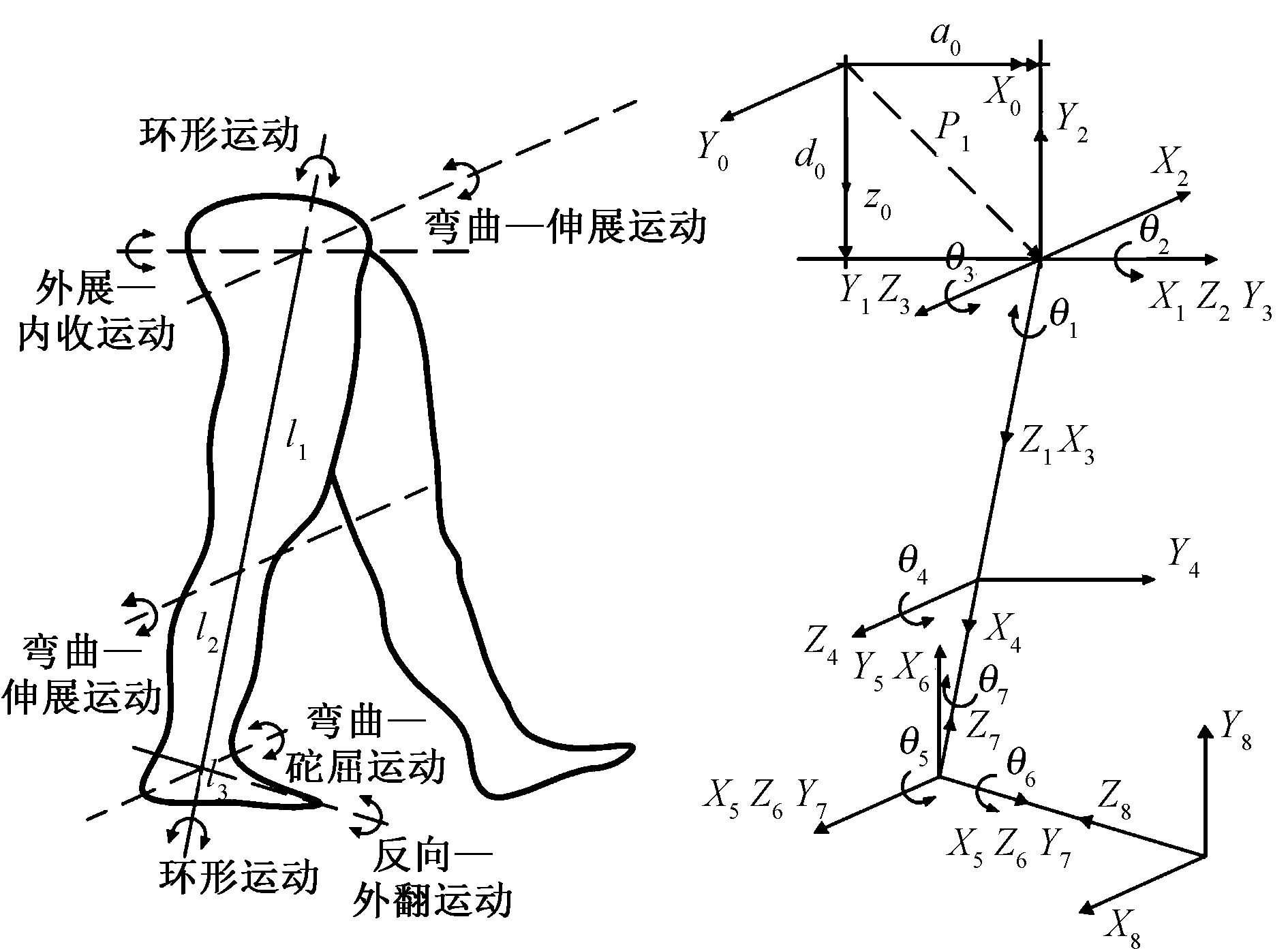
图9 下肢外骨骼的D-H描述
在确定坐标系之后,依据各部件运动范围及尺寸数据,得到D-H参数,下肢外骨骼部段的D-H参数见表2。

表2 下肢外骨骼部段的D-H参数
表中θi是Xi-1围绕Zi-1旋转到Xi的角度,同时如果关节i旋转,θi也是关节变量,取决于每个关节的运动范围βi。di是第(i-1)个坐标系原点到Zi-1轴和Xi轴交点的距离沿Zi-1轴的长度。ai是Zi-1轴和Xi轴的交点到第i个坐标系原点的距离沿Xi轴的长度。ai是Zi-1轴围绕Xi轴旋转到Zi轴的角度。ai和di为外骨骼部段尺寸,为固定值,取决于人类个体。
3.2 运动学方程建立及正运动学解
(1)
式中:DZ(di)和DX(ai)分别为第(i-1)个坐标系原点到Zi-1轴和Xi轴交点的距离沿Zi-1轴的向量位置以及Zi-1轴和Xi轴的交点到第i个坐标系原点的距离沿Xi轴的向量位置。
最终求得:
(2)
将表2中参数代入式(2)中可得到各相邻坐标系之间的旋转矩阵为
则下肢外骨骼机器人的机械腿足部底板末端执行器相对于腰部板中心的变换矩阵为:
(3)
为验证运动学正解方程的正确性,可将初始位置参数β1=0°、β2=0°、β3=0°、β4=0°、β5=0°、β6=0°、β7=0°、β8=0°代入式中,得到Px=a0+l3、Py=0、Pz=l1+l2。这和人体直立姿态下外骨骼机器人的位姿是相同的,说明下肢外骨骼的运动学正解是正确的[15]。
正运动学分析结果表明,外骨骼机器人结构设计合理可靠,也为后续根据末端执行器位置确定各关节具体运动情形提供了理论指导,为控制模块的研究奠定了基础。
4 下肢外骨骼机器人运动学仿真分析
将在SolidWorks软件中建立的人机三维模型另存为Parasolid格式导入到运动学软件ADAMS中,并在ADAMS/VIEW环境中设置各个零件的质量、材料等属性参数[16]。为实现提高仿真效率、简化仿真等目的,可在保证仿真完整性的前提下,尽量减少模型构件的个数。对于没有相对运动的构件,可以运用布尔加运算将其设置为一个整体,实现多合一,达到简化目的。
4.1 虚拟样机的建立
人机三维模型(图10)建立好之后,需要在各个构件之间添加约束,对于没有相对运动的构件采用固定副,有相对转动的构件采用转动副,有相对移动的构件采用移动副。下肢外骨骼机器人单侧设计有7个自由度,为简化仿真,将每侧矢状面上的弯曲/伸展自由度定义为旋转副,其他自由度定义为固定副,即每侧髋关节、膝关节、踝关节矢状面上各保留1个自由度(旋转副)。人体仿真模型的约束设置参照外骨骼设置方法,使其保持一致。

图10 人机三维模型
在知晓各个关节的变化规律后可对虚拟模型进行运动控制,在ADAMS运动学控制方法中,最常用的控制函数为STEP函数[17],STEP(x,x0,h0,x1,h1)为其基本格式。通过对髋关节及踝关节添加驱动,最终完成人机模型虚拟样机的建立。
4.2 运动学仿真结果分析
通过ADAMS/Simulink工具条,设置仿真时间End time 为16 s,设置仿真步长Steps 为100,即仿真帧数为100(每隔0.16 s输出一次仿真结果),所得下肢外骨骼机器人行走图如图11所示。

图11 人机模型样机联合行走图
通过ADAMS/postprocess处理模块将数据处理后得到人体与外骨骼的大腿、小腿的质心位置与速度变化曲线,分别见图12~15。
由图12、14可知,人体与下肢外骨骼机器人联合行走过程中,大小腿质心位置变化曲线光滑稳定,表明人机联合行走状态稳定。质心位置曲线出现波动上升是由于机器人迈步行走时质心在垂直方向上的上下周期性波动,但由于质心位移在水平方向上的持续增大,曲线最终变化趋势为持续上升。人体和机器人大小腿质心位置运动曲线的变化规律相同,基本呈现同步变化状态,说明人机协同性良好,机器人结构设计合理。图13、15示出,人体和机器人大小腿速度变化曲线变化规律基本相同,曲线动态一致。从曲线斜率看,在行走过程中存在加速度变化的过程,这是为了保证机器人能更稳定地行走。

图12 人机大腿质心位置变化曲线
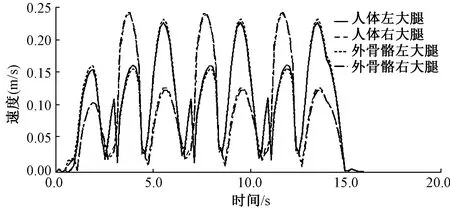
图13 人机大腿速度变化曲线
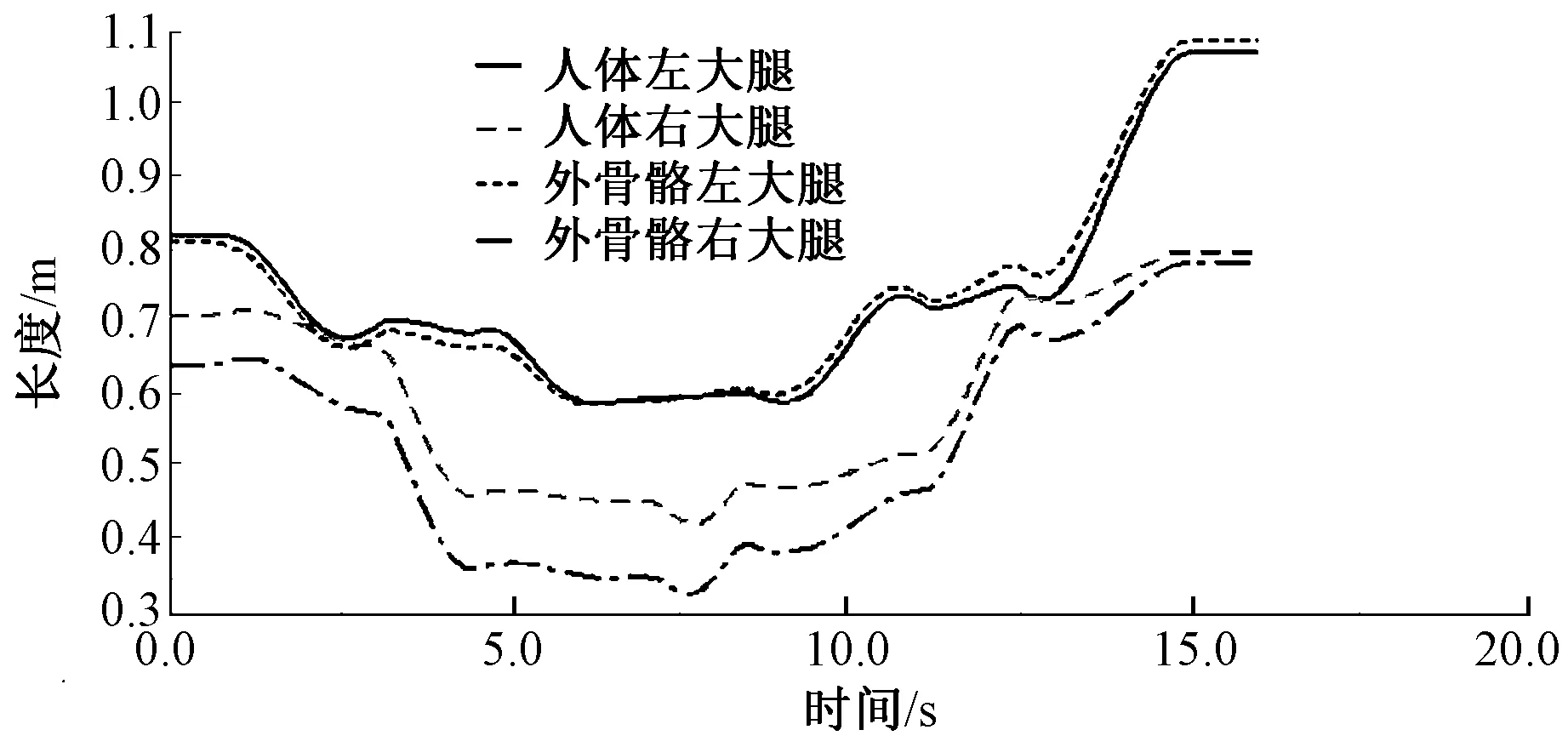
图14 人机小腿质心位置变化曲线
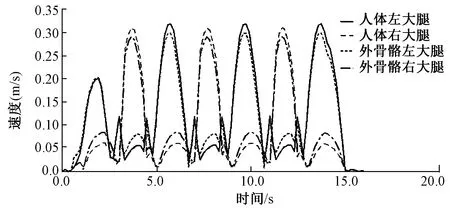
图15 人机小腿速度变化曲线
仿真结果表明,人机联合行走过程中,外骨骼机器人与人体具有良好的跟随性,能够满足人体行走运动需求,其运动学建模和分析方法正确且合理,也验证了外骨骼机器人机构设计的合理性,对实物模型的建立起到了指导作用。其次,人机联合行走曲线图的获取,也为后续根据传感网络获取的数据判断人机联合行走状态提供了思路,为控制模块研究工作的展开奠定了基础。
5 结束语
为解决刚性外骨骼机器人灵活性问题,从人体下肢运动机制、驱动方式以及性能要求出发,设计了一款基于液压驱动的下肢外骨骼机器人机构。对外骨骼关键关节部位进行了独特的机构设计,在保证灵活度、轻量化及功能的基础上,满足了复杂运动的需求以及不同人群穿戴要求。通过对下肢外骨骼机器人进行D-H建模,从理论上分析了外骨骼机器人机构设计的合理性,并为控制模块的研究提供了理论指导。在SolidWorks环境下建立人机三维模型,并导入ADAMS软件中,对下肢外骨骼机器人进行了运动学仿真,仿真结果表明外骨骼机器人机构设计合理,验证了理论分析的正确性,对下肢外骨骼机器人运动的进一步研究具有重要参考价值,也为控制模块研究工作的展开奠定了基础。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中老年保健(2021年7期)2021-08-22
发明与创新·大科技(2021年3期)2021-04-30
南都周刊(2021年3期)2021-04-22
小哥白尼(野生动物)(2021年12期)2021-03-29
轻兵器(2019年5期)2019-06-21
家庭医学(2017年8期)2017-09-06
知识就是力量(2017年3期)2017-03-21
海外星云(2016年7期)2016-12-01