
手术机器人智能人机交互技术专利综述
2021-07-30 02:51谢萍王丽娜
电子元器件与信息技术 2021年4期
谢萍,王丽娜
(国家知识产权局专利局专利审查协作江苏中心,江苏 苏州 215163)
0 引言
随着大数据分析和人工智能的发展,医疗机器人由于传染病防治、远程医疗等多方面优点而发展迅速。在“十三五”规划纲要和《中国制造2025》等指导文件中均有提及[1]。同时,医疗机器人预计2021 年将达到207亿美元的市场规模,手术机器人占其中的60%[2]。在医疗机器人中,应用最广泛的是美国直观外科的达芬奇系统,2012-2017年间,它在中国的台数从15到69,全年完成手术数量从3551到 55462[3]。本文研究的重点是手术机器人的智能人机交互技术,应用于不同医学学科的各种手术,例如:内窥镜手术、骨科、神经外科、血管介入、放疗、眼科、牙科等,但不包括在人体内部运行和作用的胶囊机器人和纳米机器人[1]。
1 全球专利态势
本文以S系统的检索结果为样本,国内、国外专利数量分别为1272、1832,数据采集日期为2020.5.1。
1.1 全球申请概况
根据全球专利的申请量分析,国外申请最早的年份是1983年,2001年已达22件,而国内早期申请仅在1991、1997、1998年存在1件申请。2002后国内申请逐步增加,并在2015年首次反超。
根据全球申请人的分析,美国的申请量最高,为997件,比申请量第二的中国高了698件。其中,国内/国外申请量TOP5的申请人从高到低分别是直观外科、柯惠LP、飞利浦、深圳精锋医疗、哈工大(258、40、38、28、21),和直观外科、马科外科、航生医疗、伊西康内外科、飞利浦(644、94、52、48、35)。可见,直观外科、飞利浦和柯惠LP提前在中国进行了专利布局,而国内申请人多为高校申请,如图1所示。
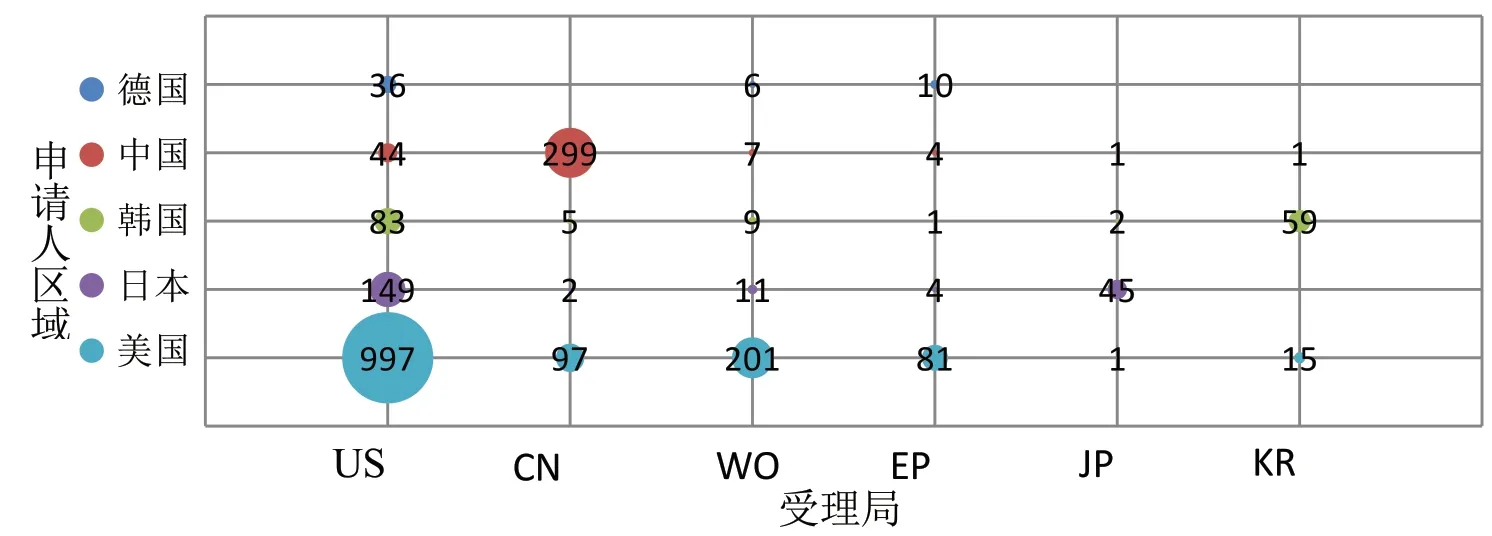
图1 当前申请(专利权)人区域/受理局
1.2 重点技术的分布状态
本节以输入方式、输出反馈和交互控制主干分支统一地对所有专利进行技术分解。在人机交互的过程中,手术机器人通过显示设备向用户提供尽可能多的患者信息,通过输入设备和控制模式提供更符合实感的多模态交互。例如,在放疗手术中对病灶定位导航、治疗过程中对局部温控[2]。
输入方式、输出反馈和交互控制作为第一级分支,分别占比10%,28%和62%。输入方式分为物理型和生物信息,物理型输入设备包括手柄、脚踏板等,生物信息输入设备包括语音、视觉、手势、触摸等。手术机器人为了与传统医学训练相对接,物理型输入设备更多,尤其是手柄,如图2所示。控制模式是交互控制下的二级分支,分为被动式、主动式、半主动式,占比依次为88%、8%、4%,其中被动式的情况下手术机器人完全由用户控制,主动式的情况下由手术机器控制,半主动式则是用户和手术机器人共同控制、相互制动[3]。
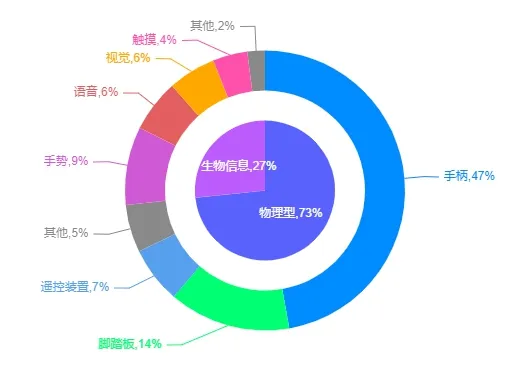
图2 输入方式的技术分布
2 手术机器人智能人机交互重点技术分析
2.1 输入设备
2.1.1 物理型
输入设备主要是手柄、脚踏板(WO2020018124 A1、US2020008896 A1);还包括语音、视觉、手势、触摸等生物信息采集设备。手术机器人的输入设备与手术室环境更适配,例如:其位置设置在外科医生控制台(US2020008896 A1、US2003109857 A1)上,为医生提供更舒适便捷的输入方式。CN209713134U中医生能够个性化调整外科医生控制台上的显示屏俯仰角度以及主手、踏板相对外科医生控制台座椅的位置,外科医生控制台根据身份信息将最终状态进行存储,下次相同医生可根据自身身份信息直接使用 (CN209713134U)[4]。
手柄包括抓具(WO2019099504、WO2019099584)、枪把式(CN106659541A)、操纵杆、或推动器、手套(KR20180116161A,US2014336669A1),手柄能够感知医生控制实现精细化的操作,具有不可替代的优越性。脚踏板则是根据力度实现输入。
2.2.2 生物信息
随着智能人机交互技术的发展,手术机器人还将语音识别(US2020008896A1)、眼球跟踪等视觉抓取(CN106659541A)、手势、触摸等生物信息作为输入方式。
2.2 控制模式
交互控制的双方分别是医护人员和手术机器人,连着以指定的控制模式通过计算机程序共同完成手术。手术机器人携带手术器械的机械臂比医生的诸如腕部、手指等部位在旋转幅度、伸缩长度上更灵巧。此外,也存在基于磁场实现的无直接接触的机械结构之间的传动。
被动式控制模式是控制模式中最广泛最成熟的一种。为了使医生顺利进行手术操作,手术臂在手术过程中根据外科医生控制台处发送的指令进行同步动作(CN209713134U)。控制器从主机械臂接收输入信号,并按照医生的输入指令移动机械臂组件的从机械臂。医生侧装置中的输入装置能够控制插入病人身体内的摄像机,及向手术工具施加灼烧电流(CN107847282A)[5]。
主动式控制模式在机器人系统中的操纵器控制器处理预装数据、来自导航系统的数据和来自编码器的数据,根据预编程或预定的规则得到器械将遵循的路径,过程中无需医务人员的输入(CN105592817A、CN209713134U、CN107847282)。半主动式控制模式是以上两种模式的折中方案,需要在被动式和主动式之间进行切换。从外部图像数据中提取的解剖特征数据用于更新解剖模型,使其更准确表示解剖结构的术中状态和/或更新器械配置的基于传感器的模型以更准确地表示器械的术中姿势(US2017151026)。
3 趋势分析
本文对手术机器人的专利数据和关键技术进行了全面分析,以期对其趋势的预测更准确可靠。经过分析可以得到以下结论:
(1) 手术机器人需要在有限的空间内更灵活地转动手术器械,要求更小体积的手术器械和更小的操作空间。传统手术中由医生手持器械,多人操作时手臂、器械等部位存在相互遮挡的问题;创口尺寸更大,容易影响患者预后效果。本文认为在小巧的器械基础上,需要捕捉更精细操作的输入设备和更安全和快速的控制模式,进一步考虑控制模式之间的切换。
(2) 无论该显示器位于本地还是远程端,交互控制技术将预先获取的和/或实时的诊疗信息集成地呈现在手术机器人的显示器上。一旦5G、物联网等通信技术有所创新,将彻底改变控制模式相关算法的时间和空间的约束条件,因此,控制模式的开发需要考虑可扩展性和普适性。
(3) 全自动手术将是手术机器人的最终目标,其发展基础将是主动式控制模式,本文认为至少需要高度集成的中心服务器对可靠的医疗数据和图像等资料和诊疗信息进行搜集,从而准确提供安全的治疗手段。
4 结语
本文着重根据专利分析描述输入设备和交互控制模式,在输入设备层面上,生物信息输入模块在准确率和实时性上值得关注;在交互控制模式上,主动式、被动式和半主动式需要的是灵活性。此外,从技术发展整理中发现,以上两项技术都离不开稳定运行的平台和低耦合性高通用性的特定功能模块。
猜你喜欢
老年医学研究(2021年5期)2022-01-19
少年文艺·开心阅读作文(2022年2期)2022-01-10
建材发展导向(2021年24期)2021-02-12
装备制造技术(2020年11期)2021-01-26
电子制作(2018年11期)2018-08-04
江西建材(2018年2期)2018-04-14
中国计算机报(2017年40期)2017-11-16
制冷技术(2016年4期)2016-08-21
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
