
示教型智能巡检系统设计与实现
2021-07-29 11:59:40浙江建设职业技术学院王振华王瑾烽徐星亮
电子世界 2021年12期
浙江建设职业技术学院 王振华 王瑾烽 徐星亮
针对部分野外矩阵式仓储设施开展人工巡检的难点与痛点,及部分不规则尺寸的仓储设备巡检中仓位(工位)定位难的问题,本文中设计了一种基于云平台的示教型巡检系统,有效提高了仓位(工位)巡检定位的效率,同时降低了巡检成本。
随着当今社会仓储技术的进步与发展,各类立体仓库、立体车库、各类排柜、多层蓄电池架等矩阵式仓储设施大量应用到工作与生活中,这类设施通常仓位(工位)数量多,为了高效利用仓储场地的空间,通常这类设施安装高度较高且工作空间狭窄,人工开展巡检难度较大。尤其是一些野外的仓储设施,人工现场巡检成本更大。另外,当部分仓位(工位)的尺寸不规则时,根据编号如何准确定位一个仓位(工位)的位置也困难起来。面对这类不规则、高密度的多仓位(工位)设施巡检工作,本文中设计了一种基于云平台的示教型智能巡检系统,该系统能通过手动示教的方法记录各个仓位(工位)的准确位置,通过云平台可远程开展智能巡检,及时了解各个仓位(工位)内放置物品的情况,能有效提高此类应用场合的巡检效率,减少巡检工作量,尤其适合各类野外与不规则的仓储设施使用。
1 系统总体设计
针对上述的问题,本方案设计了一种可示教型智能巡检系统,整个系统包括:云平台、现场通讯终端、远程终端、现场控制器、示教器、两轴巡检机构、巡检数据采集模块、被巡检对象。
可通过云平台与现场通讯终端的通讯,将巡检指令发送到工作现场,现场通讯终端将收到的控制指令发送给现场控制器,由现场控制器控制驱动电机动作,驱动两轴巡检机构到指定仓位(工位)进行巡检,同时现场通讯终端将现场巡检数据上传云平台,从而代替了人工的巡检工作。通过系统自带的示教器可对两轴巡检机构进行定位示教,系统能记录下每个仓位(工位)的位置数据,以用于后期仓位(工位)的定位控制。图1所示为示教型智能巡检系统总体框图。

图1 示教型智能巡检系统总体框图
本智能巡检系统的工作过程如下:
云平台是该系统的管理与控制中心,手动巡检工作时,远程控制终端可通过云平台来实现远程手动巡检指定仓位(工位),云平台将通过现场通讯终端将控制指令送给现场控制器,然后由现场控制器根据收到的巡检指令,提取出需要访问的仓位(工位)号,根据提取的仓位(工位)号调用先前示教时记录的示教位置数据,驱动电机工作,将巡检机构驱动到指定仓位(工位)开展巡检。自动巡检工作时,本系统也可以根据云平台发送的巡检策略,按照系统预制的巡检规则,向现场控制器批量发送巡检指令,自动批量对部分或全部仓位(工位)开展巡检,并上传数据。
2 硬件系统设计
2.1 巡检机构总体结构
本系统中巡检机构采用两轴设计(水平方向X轴、垂直方向Y轴),主要包括两个垂直的运动轴、巡检设备工作台、驱动电机等主要部件。工作时巡检数据采集模块安装在巡检设备工作台上,工作台与驱动轴垂直布置在被检对象的侧立面,由两个轴的运动机构驱动巡检设备工作台在被检对象的侧立面上做定位控制,到达目标仓位(工位)进行巡检。图2所示为两轴巡检机构结构框图。

图2 两轴巡检机构结构框图
2.2 现场控制系统硬件设计
本文中现场控制器采用三菱FX3U系列PLC控制器来实现。现场通讯终端采用有人物联USR-PLCNET510云网关来与云平台通讯,该型网关可直接与设备厂家提供的有人云平台便捷地实现数据采集与监控。两轴巡检机构采用两套三菱MR-J3-A伺服系统来驱动机构动作,进行定位控制。图3所示为现场控制器与驱动器接线图。

图3 现场控制器与驱动器接线图
3 软件系统设计
本文中软件系统的设计主要由以下两个模块构成:云平台界面设计、现场控制程序设计。
3.1 云平台界面设计
云平台界面设计主要是在网关设备厂家提供的有人云平台上利用组态技术开展监控页面的设计与编程调试,根据工艺要求设计对应的监控画面,用户可远程在任何地点登陆有人云平台监控现场巡检系统。
3.2 现场控制程序设计
现场控制程序主要包括仓位位置示教子程序与定位巡检子程序。
仓位位置示教子程序用于手动对各个仓位的位置进行示教,并将位置的数据记录到现场控制器中,以便后期实现巡检定位,仓位位置示教子程序如图4所示。

图4 仓位位置示教子程序
当示教按钮X22有效时,巡检机构向目标位置运行,到达指定位置后,读取位置数据并保存。
定位巡检子程序主要在收到云平台发出的巡检指令后,从仓位位置数据记录单元中取出对应的位置数据,控制伺服系统驱动。定位巡检子程序段如图5所示。
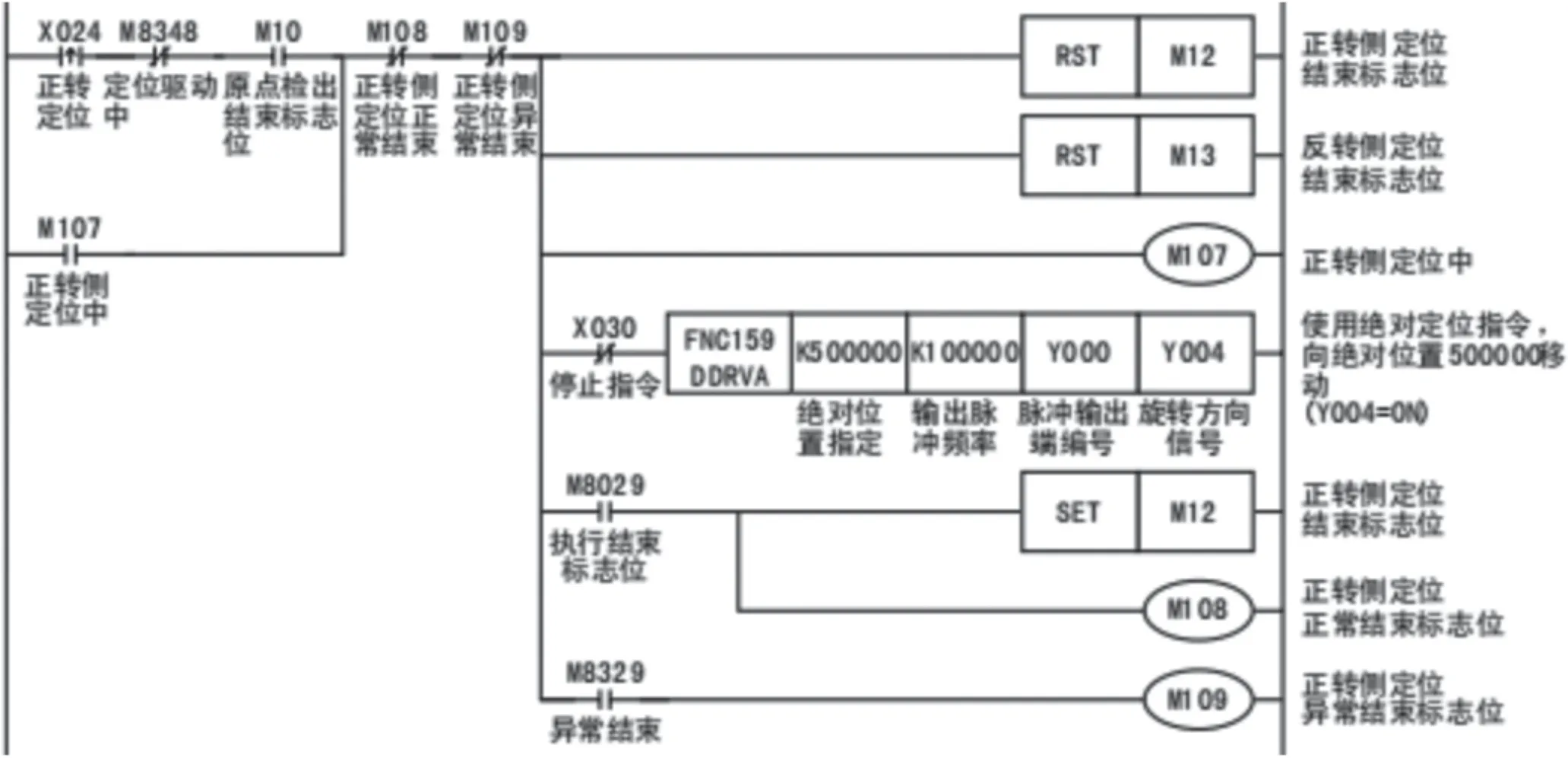
图5 定位巡检子程序
当云平台巡检定位指令X24有效后,系统读取目标仓位(工位)的位置数据,定位运行到指定位置开展巡检。
小结:本文中设计的系统相比于现有巡检系统具备以下改良:通过云平台便于开展远程巡检操作;能实现仓位(工位)位置的示教与记录,尤其适用于仓位(工位)不规则分布的应用场合;系统的巡检策略可通过云平台实现远程动态调整。该型系统有效的提高了仓储设施巡检的效率与智能化水平。
猜你喜欢
中国新闻周刊(2023年42期)2023-12-03 14:39:41
现代装饰(2020年8期)2020-08-24 08:22:58
物流技术与应用(2020年5期)2020-06-25 02:48:12
意林(2020年10期)2020-06-01 07:26:37
铁道通信信号(2019年9期)2019-11-25 01:44:58
电子制作(2016年15期)2017-01-15 13:39:14
杭州(2015年9期)2015-12-21 02:51:49
自动化博览(2014年4期)2014-02-28 22:31:14
