
HSV色彩空间和OTSU阈值分割的盲道识别算法设计
2021-07-29 11:59:26江苏师范大学江苏圣理工中俄学院吴俊涛曹开颜付明慧曹雨萌
电子世界 2021年12期
江苏师范大学江苏圣理工——中俄学院 吴俊涛 曹开颜 付明慧 曹雨萌
中国是世界盲人数量最多的国家,而盲人因为视觉的障碍,日常出行有诸多不便。为保障盲人的安全出行,本文提出了基于HSV色彩空间和OTSU阈值分割的盲道识别算法。对于有标识色的盲道通过颜色分割的方法进行盲道识别,对于无标识色的盲道通过OTSU阈值分割进行识别,经过MATLAB实现模型效果验证,能够有效解决盲人出行困难问题。
2020年,中国失明者已经超过了两千万,这一庞大的数量意味着大约每七十个中国人里就有一个人看不见,与之对应的是盲人对正常出行的需求日益高涨。
1991年在北京建成了中国的第一条盲道,经过多年的推广,如今盲道几乎在城市中随处可见,然而在我们的日常生活中还是很难看见盲人。这是因为存在许多违规的盲道和随意侵占盲道的现象,使得不少盲道不仅没有为盲人提供便利反而成为盲人出行的阻碍。导盲犬虽然具有较好的导盲效果,但因为培养成本过高导致在国内短时间还无法普及。所以除了不断加强规范盲道建设的力度,设计出可以识别出城市中盲道的方法也是十分迫切的事情。
1 设计思路
盲道是专门帮助盲人行走的道路设施。盲道一般分为行进盲道和提示盲道,行进盲道引导盲人前行,提示盲道提醒盲人转弯。盲道一般是用特殊形状的砖和鲜艳的黄色组成的,如图1所示。所以可以采用颜色阈值分割的方法进行盲道识别。但在现实中也会发现一些盲道不是黄色或是长久风吹日晒已经分辨不清原有的黄色,对于这一类盲道则可以采用OTSU阈值分割的方法来解决。
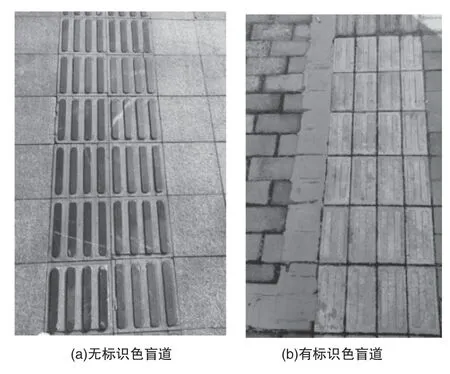
图1 盲道实拍图
2 基于颜色分割的盲道识别
基于颜色分割的盲道识别主要针对有明显颜色特征的盲道,这一类盲道通常为黄色。目前,常用的颜色空间模型有RGB模型、YUV模型、HSV模型等。RGB模型是最常用的彩色信息表达方式,其中R、G、B分别代表红、绿、蓝三原色,通过这三种颜色可以混合成任意颜色,一般图片多采用这种模型。但是,R、G、B三个分量之间界限不清,存在重叠部分,图像分割时容易受到光照等因素影响,难于准确分割。HSV模型中H、S、V分别代表色调、饱和度和亮度,这种颜色描述方法更符合人眼观察颜色的方式,且可以考虑到光照的影响。
2.1 RGB颜色空间转HSV颜色空间
在MATALB中存在将RGB转换成HSV的函数,直接调用就可以实现转换。在MATLAB中,RGB转HSV后H、S、V三个参数会自动做归一化处理,即范围均为0~1。RGB转HSV后,各个分量提取的图形如图2所示。

图2 分量提取图形
2.2 颜色分割
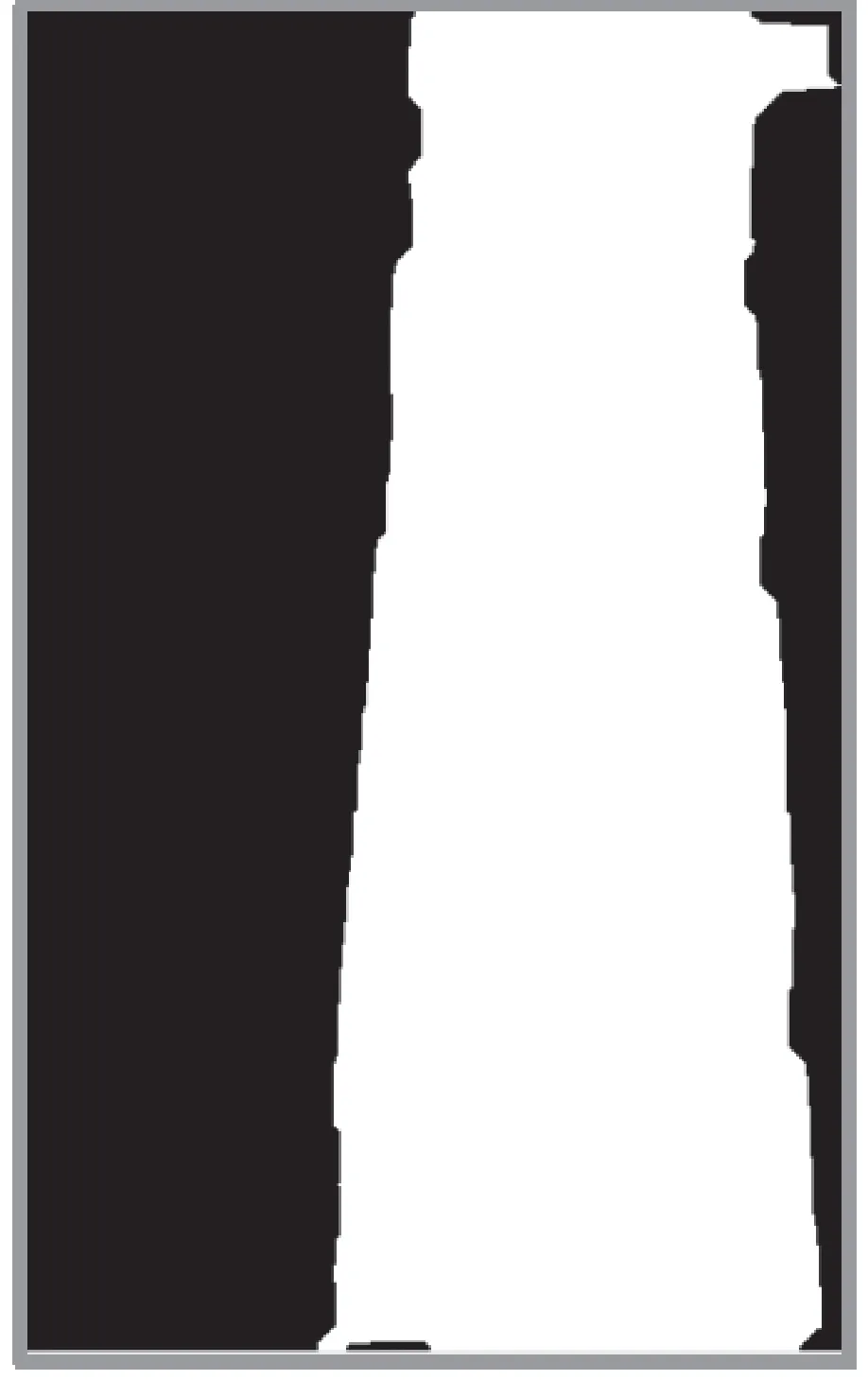
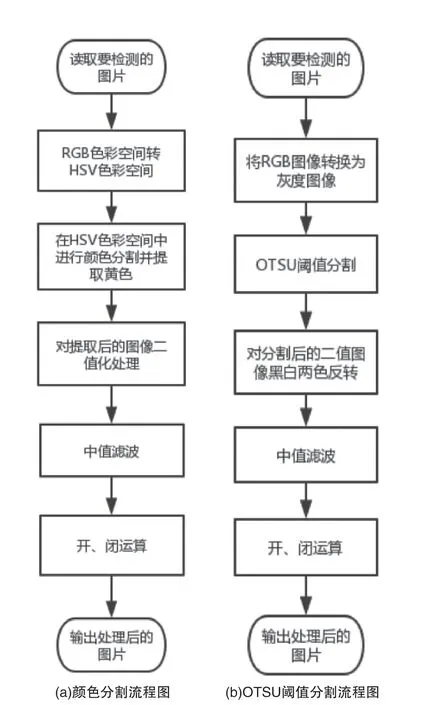
基于HSV的颜色分割是一种阈值分割,主要是通过H分量来区分颜色的色度,但是从上图中可以看出H分量对于白色不能很好的区分,故而通过S和V分量加以控制,能较精准地判断出某像素的颜色。本文中三个分量的提取范围设置为0.05 图3 提取黄色后的图像 从图3可以看出用颜色分割提取出的图像有不少的噪声,需要通过一系列除噪来获得盲道的分割。首先将该图转换成二值图像,然后通过中值滤波去掉较小的噪声。中值滤波是一种非线性滤波,在一定情况下可以有效清除噪声同时有保持良好的边缘特性。在MATLAB图像处理中开运算可以去除图像中较小的点,闭运算可以将图像中的区域链接在一起。开闭运算有一个等幂性,它意味着一次滤波就能把所有特定的于结构元素的噪声去除干净,并且重复运算不会有效果。所以最终通过开闭运算结合就可以将盲道完整的分割出来。效果见图4所示。 图4 分割出的有色盲道 在现实中会存在一些没有鲜明颜色的盲道,对于这种盲道颜色分割的方法就无法适用,本文采用OTUS阈值分割来进行盲道识别。OTUS算法又称最大类间方差法,该算法是在灰度直方图的基础上采用最小二乘法原理推导出来的,它的基本原理是以最佳阈值将图像的灰度值分割成两部分,使两部分之间的方差最大,既具有最大的分离性。效果图见图5所示。 图5中分割出来的盲道为黑色,需要盲道变为白色,所以对该图像进行黑白两色的反转。反转后的图像中依旧会存在许多噪声,可以采用与上文中所述相似的方法去除。最终得出的效果如图6所示。 图5 OTSU阈值分割后的盲道 图6 分割出的无色盲道 MATLAB的程序流程图如图7所示。 图7 MATLAB程序流程图 结论:针对现实盲道的颜色和纹理特征,本文提出了一种算法,在对颜色鲜明的黄色盲道采用HSV色彩空间对黄色区域进行阈值分割,而面对无鲜明颜色的盲道采用OTSU阈值分割的方法进行分割。利用该算法可以较便捷地识别现实生活中的大部分盲道,并且解决了当盲道颜色不明显时,用单一颜色识别失效的问题,大大便利了盲人的出行并保障安全。
2.3 除去噪声
3 基于OTSU阈值分割的盲道识别


4 程序流程图
猜你喜欢
小猕猴智力画刊(2023年11期)2023-11-30 03:21:16
儿童时代·幸福宝宝(2022年11期)2022-12-09 11:32:54
青少年日记·小学生版(2019年2期)2019-09-02 13:37:38
小天使·一年级语数英综合(2019年8期)2019-08-27 02:23:00
小学科学(学生版)(2018年11期)2018-11-22 07:12:26
小天使·一年级语数英综合(2017年10期)2017-10-31 07:21:28
小主人报(2016年2期)2016-02-28 20:46:28
人生十六七(2015年5期)2015-02-28 13:08:27
小学生作文·小学低年级适用(2014年7期)2014-09-10 15:45:50
幼儿智力世界(2012年3期)2012-04-29 00:44:03
