
C52单片机的校园消防机器人的设计
2021-07-29 11:59:02东南大学成贤学院李雪若涵杨顺平陈逸时
电子世界 2021年12期
东南大学成贤学院 肖 杨 李雪若涵 杨顺平 陈逸时
随着社会经济的迅猛发展,各种人工智能产业应运而生,智能机器人更受到了广泛的关注,也引起了相关专业的学生及研究人员的探索与研究。
本机器人小车主要以STC89C52单片机作为主控芯片,采用L293D电机驱动芯片完成对机器人小车两只电机的驱动。采用L9110风扇模块实现灭火功能。使用JDY-09蓝牙串口模块作为通信控制模块,实现了用手机蓝牙控制完成小车的动作。并采用S03641A四位数码管显示小车运行的状态信息,实现了很好的人机交互。
1 项目的主要任务及目标
以STC89C52单片机作为主控芯片,采用L293D电机驱动芯片完成对机器人小车两只电机的驱动。采用两个TCRT5000红外寻迹避障传感器模块和一个HC-SR04超声波测距模块来实现小车的寻迹和避障功能。采用L9110风扇模块实现灭火功能。使用JDY-09蓝牙串口模块作为通信控制模块,实现了用手机蓝牙控制完成小车的前进、后退、左转、右转、灭火五个动作的控制。并采用S03641A四位数码管显示小车运行的状态信息,实现了很好的人机交互。
2 整体方案设计
2.1 硬件方案
本机器人小车主要以STC89C52单片机作为主控芯片,加以各传感器及电机驱动。在制定方案时,我们想出了风扇和喷水两种方案,经过团队成员的讨论及老师的建议我们选择了风扇灭火的方案。总体设计框图如图1所示。
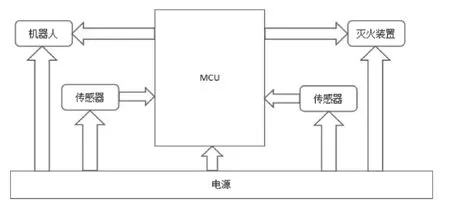
图1 硬件总体设计框图
2.2 软件方案
软件设计以硬件设计图为基础,着重进行电机驱动模块,各传感器模块的程序设计。软件总体设计框图如图2所示。
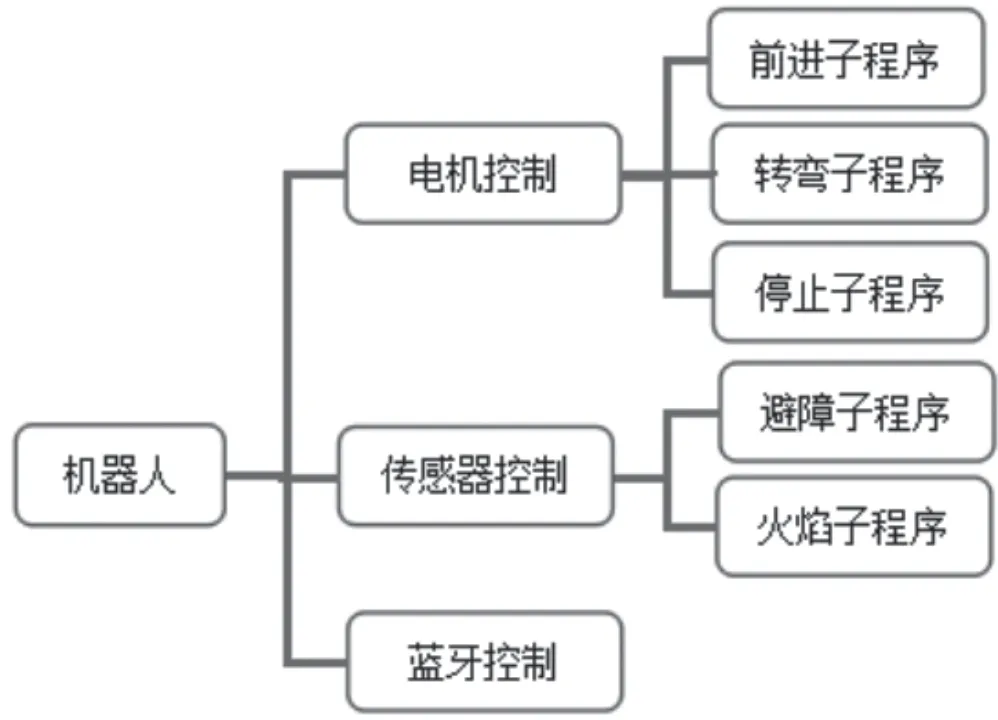
图2 软件总体设计框图
3 硬件设计
3.1 电源模块
本机器人小车在电源的处理上采用了稳压芯片LM7085CV。采用LM78系列三端稳压电路构成稳压电源的外部元件。电路中还有调节管的过流、过热和保护电路,使用可靠、方便、廉价。电路原理图如图3所示。

图3 电源模块电路图
3.2 电机驱动模块
本机器人小车采用了L293D电机驱动芯片,芯片L293D属于H桥集成电路,其输出电流最高600mA,最高输出电压36V,内部ESD保护,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。电路原理图如图4所示。

图4 电机驱动模块电路图
3.3 传感器模块
本机器人小车采用了两个TCRT5000红外寻迹避障传感器、两个火焰传感器和一个HC-SR04超声波传感器。
TCRT5000传感器的红外发射二极管不断发射红外线,当被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,接收管饱和,此时模块的输出端为低电平,指示二极管被点亮,反射距离为1mm~25mm。火焰传感器使用了LM393比较器,可以检测760nm~1100nm范围内的光源;火焰越大,测试距离越远。HCSR04超声波传感器感应角度不大于15°,探测距离为2cm~45cm,采用IO触发测距测试距离,绕射现象小,方向性好。
道教典籍《文昌帝君阴骘文》开篇言:“救人之难,济人之急,悯人之孤,容人之过。 广行阴骘,上格苍穹。”[11]402 它告诫人们要多行善事,多积阴德,才会得到上天的眷顾。 《太平经》里讲“善自命长,恶自命短” “努力为善,子孙延年”[12]525,549,行善不仅可以使自身寿命增长,更会把福报延至子孙,让子孙也增加寿命。 吸纳了道教风水学说的古代朝鲜堪舆术,实则也容纳、吸收了道教行善积德、济世利人的博爱精神。
3.4 灭火模块
本机器人采用了L9110风扇传感器模块进行灭火。使用马达控制驱动L9110芯片驱动,兼容舵机舵盘控制螺旋桨,效率高,可轻松吹灭20cm外的打火机火焰。
4 软件设计
4.1 软件开发平台
我们采用了ALTIUM DESIGNER WINTER 09设计软件设计了原理图,并绘制了pcb图,利用keil5软件,使用C语言编写程序,并通过烧写工具将程序下载到单片机中。Keil C51是51系列兼容单片机C语言软件开发系统,提供了包括C编译器、宏汇编、库管理和一个功能强大的仿真调试器等在内的完整开发方案,通过一个集成开发环境将这些部分组合在一起。生成的目标代码效率非常之高,在开发大型软件时更能体现高级语言的优势。
4.2 软件设计流程图(见图5)

图5 软件流程图
猜你喜欢
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
汽车维修技师(2019年7期)2020-01-16 04:33:04
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
汽车维修技师(2018年11期)2018-05-11 02:38:32
故事大王(2017年4期)2017-05-08 07:53:40
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
现代工业经济和信息化(2016年4期)2016-05-17 05:35:45
汽车维护与修理(2016年3期)2016-02-28 13:16:56
