基于相控阵技术的多目标定位门架天线设计
2021-07-22 13:49李异,傅达
湖南交通科技 2021年2期
李 异, 傅 达
(湖南省交通科学研究院有限公司, 湖南 长沙 410015)
自2020年1月1日实现全国高速公路ETC联网运行以来,设备整体运行良好,人民的通行舒适感显著提高,社会经济效益明显,但是部分ETC车道存在跟车干扰、邻道干扰等问题。跟车干扰、通信识别错误、邻道干扰等问题的根本原因在于微波通信的无序性、车辆OBU安装位置差异、电子标签受不同厂家性能之间差异影响等问题。对此,需要在源头上对前端设备进行优化升级,使其能够做到正确识别车辆及确切定位,从根源上对跟车干扰、邻道干扰等进行优化处理。
拆除省界站后的多车道实行自由流收费方式,收费站进行物理拆除后不设车道栏杆,多车道之间并行通行没有隔离,因此可有效提高车辆通行效率。在多车道自由流ETC系统中,从大量的车辆中找出未交易车辆是一个棘手问题。系统需要对所有OBU、CPC卡车辆进行精确定位,同时确定车载电子标签在这个区域的通信位置,与车牌识别系统对车辆同步视频抓拍,实现车辆信息的实时对比确定。由于各个天线通信区域之间会有部分相互重叠,车辆自由流行驶过程中必然会经过重叠位置,所以在通行过程中,需要对OBU、CPC卡发射的微波信号强度进行检测,同时采取合适有效的定位算法来对OBU、CPC卡位置进行精确定位。目前ETC天线在系统使用中还没有充分发挥其相应功能,不能达到完全流畅的要求,需要进行人工处理,增加天线的新特性是最好的解决办法。
1 总体方案
门架天线主要由室外路侧天线和室内路侧控制器2部分组成。路侧天线包含微带阵列天线、微波收发信机、相控阵处理模块、电源模块等(见图1),信号数据通过调制/解调,以DSRC的方式与OBU进行数据交换、采集,同时更新IC卡内的数据,相控阵处理模块对OBU返回的数据,通过一系列复杂的算法,可以精确计算出OBU、CPC卡的位置。路侧控制器通过控制路侧天线,及时处理收发数据信息,同时通过通信电缆及接口与计算机进行实时通讯,用来实现数据的实时交换(见图2)。
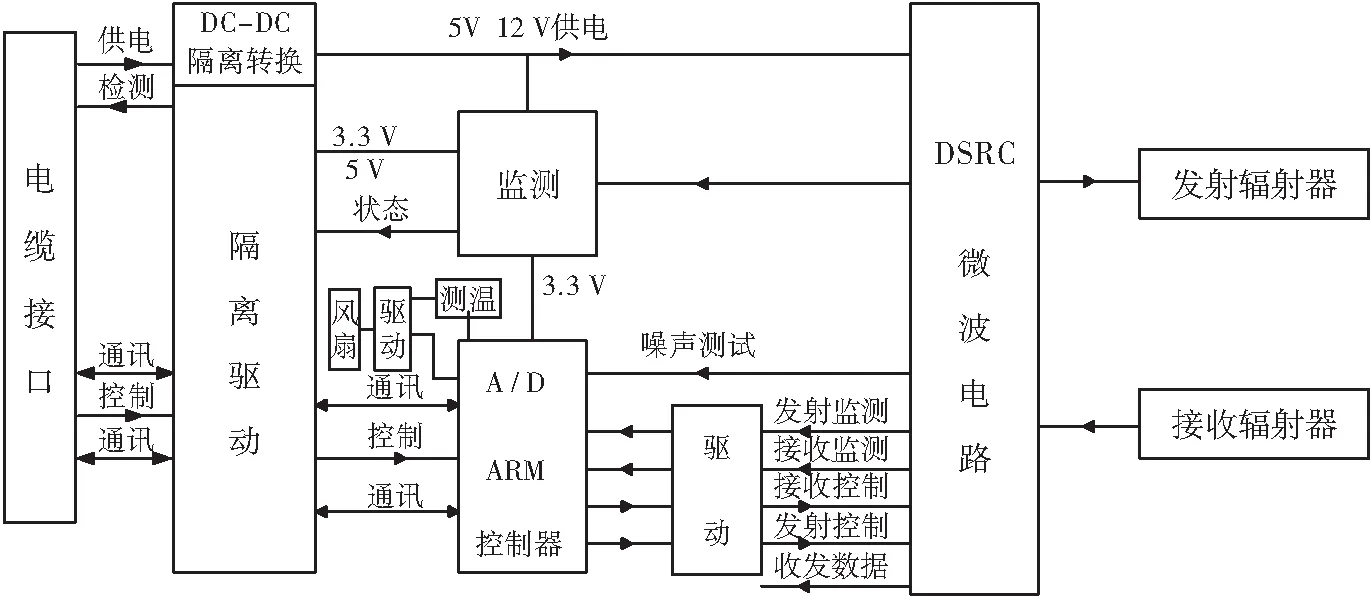
图1 路侧天线原理图

图2 路侧控制器原理图
门架天线与收费站ETC天线的工作原理及机制的主要区别如表1所示。

表1 门架天线与收费站ETC天线区别区别项门架天线收费站ETC天线过车速度最大速度150 km/h最大速度30 km/h收费工作机制计费信息累加机制入口标记,出口扣费机制覆盖范围覆盖多个车道覆盖单个车道与ETC车辆交易情况存在同一时间与多个ETC车辆通讯交易同一时间只与单个ETC车辆通讯交易天线工作机制多个天线协同工作单个天线独立工作
2 门架天线硬件设计
为方便设备升级和功能的增减,相控阵ETC多目标定位天线运用当前主流设计模式,即模块化、单元化设计理念。系统整体框图见图3,该系统由几大模块组成,主要为接收天线阵模块、时钟模块、本振模块、数模转换模块、下变频模块、存储器模块、信号处理模块、供电模块以及接口模块组成。

图3 相控阵ETC多目标定位系统
RSU相控阵定位接收机包括10个接收通道,接收通道与天线阵元采用一对一模式对应连接,用于OBU微波信号的采集;系统信号处理模块采用FPGA+DSP架构,利用传统DBF算法与MUSIC算法结合对中频数字信号进行超分辨DOA估计,得到微波信号的二维入射角,通过Capon算法以DOA信息进行接收波束形成,使波束主瓣指向相对应的目标方向,波束零点指向干扰目标方向。其中,FPGA对数字化的射频通道数据进行失真、加重、移相处理,FPGA 的乘除法器等计算硬核和软核,按照配置进行大量复数运算形成波束;DSP处理器按照实际应用条件选择波束形成配置参数,通过配置FPGA参数重构天线波束形成。
3 关键技术
3.1 相控阵天线技术
均匀线阵是相邻阵列单元间距相等、单元成直线排列的一维阵列天线。本项目中采用了接收相控阵技术,接收天线分别为沿X方向和Y方向排列的微带阵元均匀直线阵,X、Y方向阵元数量相同,通过X、Y两个方向对车道进行二维扫描,从而确定车辆的位置。
3.2 多目标精确定位
在原有ETC系统的RSU内部加入基于相控阵技术的无线跟踪定位处理模块,支持FPGA+DSP数字信号处理,通过多通道并行工作,实现全区域扫描,达到多目标之间同步定位和交易。具体定位过程如下:无线定位处理模块根据接收到的车载单元OBU反馈信号,由计算建立与之对应的坐标系,相控阵天线在通行车道上的垂直投影点作为坐标系的基准参考点,通过与基准点对比,取得OBU在车道平面上的坐标位置;其定位精度高,定位延时非常短,可确保系统交易的实时性。
运用传统延迟相加DBF算法和MUSIC空间谱估计算法对中频数字信号进行超分辨DOA估计。当ETC系统环境有干扰信号存在时,单一算法定位结果经常出现不准确现象,而采用两种定位算法同时定位,可相互验证定位结果;当两者计算结果一致时定位数据正常,当两者计算结果不一致时,则判断定位数据不可靠,放弃该条定位数据重新进行定位,以保证定位的准确性和稳定性。
3.3 通信区域精确指向
采用Capon波束形成算法实现接收天线波束形成,这样接收天线波束在通信覆盖区域内能实现精确指向,提高车辆通行速度和过车效率。系统接收天线采用矩形式微带贴片阵列天线,利用接收相控阵波束合成技术,通过Capon波束形成算法以DOA信息进行接收波束形成,使接收波束主瓣指向有用目标方向,而波束零点指向干扰目标方向。接收波束高度集中能增大信号能量、交易距离,提高车辆通行速度和过车效率;通过控制天线阵列之间的辐射单元,以及水平方向的阵列数量和阵列之间间距,同时控制阵列天线之间水平方向的波瓣宽度和副瓣电平,从而控制波束覆盖区域,可以很好地降低跟车干扰事件发生机率,同时很好地降低邻道干扰事情发生机率,确保数据在交易过程中的准确性与安全性。
3.4 软件无线电设计应用
将软件无线电设计理念应用在ETC场景中,能够进行软件更新以及扩展硬件配置,具有良好的可扩展性、灵活的系统升级能力和应用环境适用性。目前ETC系统中导致交易成功率降低的影响因素较多,主要因素包括OBU产品质量差、汽车金属膜、安装位置不合理等,导致OBU设备不能正常识别。同时OBU经过多年使用后,设备会出现电量低的状况,在这种情况下进行通信并交易,电子标签产生的信号强度较低,通信质量会受到影响,很容易出现信号不稳定以及被干扰现象;ETC车道同时存在的电子设备较多,具有电磁环境复杂的特点,导致这片空域中存在各种各样电磁辐射信号对设备通信产生干扰。为保证数据交换的成功率,需要提高RSU设备的信号通信识别能力以及抗干扰能力。所以在此采用软件无线电技术,通过提高信号质量满足OBU交易成功率。该方式能够很好地提高整个系统的交易成功率,使ETC车辆能快捷完成交易、系统运行更加流畅。
3.5 通过远程监控技术和设备自检提高系统的可维护性
通过支持联机状态下的远程设备监视、维护、升级及设备管理,具备对天线功率、设备温度、PCI卡状态等主要元件以及整个系统的自我检测,快速确定设备状态。系统可同时对多个参数进行检测、对故障快速定位、进行异常日志记录及告警等。设备的各种运行状态在控制器LED屏上实时显示,使工作现场人员及时了解设备的状况。完善的远程监控技术,不仅可以通过高速内网进行远程监控,必要时还可实现对RSU设备进行远程维护升级、设备软重启、日志查询等操作,减轻维护工作量的同时实现设备规范化管理。
3.6 通过自动温度补偿提高系统环境适应性
由于天线安装在室外,受环境温度影响较大,为此设计了自动温度补偿控制系统功能,当环境温度与设备内部温度相差较大时,该系统可对设备进行自动温补偿,使设备发射功率、接收灵敏度等主要参数的元器件不受温度影响而发生漂移,确保DSRC微波天线的各项性能指标稳定,不因外界环境温度的变化而对设备精度产生影响,使设备更加稳定可靠。
4 结语
设计了一种基于相控阵技术的多目标天线,新增定位处理模块支持通过FPGA+DSP数字信号处理,多通道并行全区域实时扫描,采用Capon波束形成算法使接收天线波束在通信覆盖区域内具有精确指向,实现多目标同时定位和交易;以满足高速公路拆除省界站后,多车道自由流通行的ETC收费需求,缓解收费拥堵,提高通行效率。该产品优异的异常处理能力和可靠的交易成功率,可给路段管理单位和司乘人员带来了极大便利,提升了广大车主的使用体验,经济社会效益显著。
猜你喜欢
信息通信技术(2022年2期)2022-05-31
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
煤气与热力(2021年3期)2021-06-09
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
电子制作(2019年24期)2019-02-23
雷达学报(2018年3期)2018-07-18